
分级调控式电磁阀半主动悬架控制策略研究
2021-07-22 03:11梁津王印曹洲王羽
汽车实用技术 2021年13期
梁津,王印,曹洲,王羽
(陕西汽车控股集团有限责任公司技术中心,陕西 西安 710200)
前言
传统的被动悬架,将其减振器的阻尼特性标定完成后,其节流孔径等结构尺寸即确定,因此阻尼力曲线不会改变[1]。当车辆行驶于不同路况时,悬架系统阻尼力无法调整,阻尼特性无法适应不同路况始终处于最优值,因此存在一定不足[2]。
而电磁阀式半主动悬架,可以根据不同路况和要求调节电磁阀内可变节流孔面积,使得阻尼力连续可变,因此可以使悬架系统阻尼特性根据不同路况自适应调节,始终保持良好平顺性[3]。
1 分级调控式电磁阀半主动悬架系统结构
分级调控式电磁阀半主动悬架系统,由传统钢板弹簧作为弹性元件,并兼有导向机构作用,后悬架还具有直推力杆、V型推力杆结构等零部件。悬架系统阻尼力由电磁阀减振器提供,另外还具有传感器及控制器[4-5]。
1.1 电磁阀减振器结构
电磁阀减振器与传统的双向作用筒式减振器结构基本一致,均具有压缩阀、伸张阀、流通阀、补偿阀,以及活塞杆、活塞、油缸、防尘罩等,区别在于电磁阀减振器内部还集成有电磁阀结构。
电磁阀的工作原理为:根据安培定则,当电磁阀的电磁线圈通过电流时,在导线周围的空间将产生圆形磁场,磁场的磁力吸引将会克服电磁阀内部压力弹簧的弹力,从而带动阀芯移动,以此改变节流孔径。通过的电流越大,产生的磁场就越强,因此不同的输入电流对应不同的电磁力大小,同时也对应不同的节流孔径。通过对电磁阀输入电流的控制,就可以利用电磁阀调节减振器的阻尼力。
1.2 控制系统结构
控制系统包括:信息采集类零部件、控制器ECU、支架与线束类零部件。
其中信息采集类零部件包括车身加速度传感器、车桥加速度传感器、电磁阀减振器温度传感器、车速传感器,主要功能为采集整车运动信息及电磁阀减振器状态,为控制策略的执行提供相关依据。
支架类包括线束支架、ECU控制器支架等,负责对线束进行固定,避免控制系统的线束在悬架跳动过程中与周边零部件干涉,造成磨损损坏。
2 半车模型建立及路谱仿真
2.1 半车模型建立
一般情况下,左、右车轮接触的道路区别不大,因此本文不考虑左、右轮接触的路面差异造成的侧倾影响,从而将整车模型建立为只研究单边的4自由度半车模型,如下图1所示:

图1 4自由度半车模型
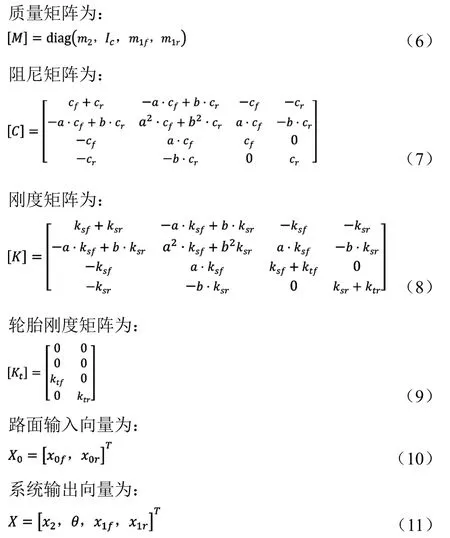
把簧载质量m2、转动惯量Ic分解为前轴、后轴和质心上三个集中的质量m2f、m2r和m2c,他们的大小关系为:

式中,ρy为绕横轴y的回转半径;a为质心距前轴距离;b为质心距后轴距离。由此可以得到三个集中质量的值为:

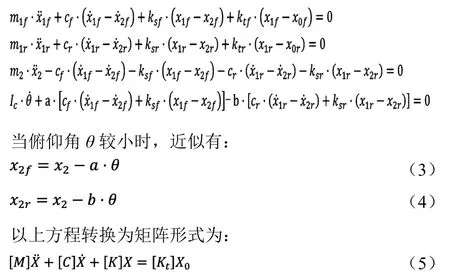
式中,m1f为前轮质量;m2f为后轮质量;ksf、cf为前悬架刚度、阻尼;ksr、cr为前悬架刚度、阻尼;cr为后悬架阻尼力阻尼力;x0f为前轮处路面不平度;x0r为后轮处路面不平度;x1f为前轮垂直位移;x1r为前轮垂直位移;θ为车身绕过质心水平横轴的转角。
式中,m1f为前轮质量;m2f为后轮质量;ksf、cf为前悬架刚度、阻尼;ksr、cr为前悬架刚度、阻尼;cr为后悬架阻尼力阻尼力;x0f为前轮处路面不平度;x0r为后轮处路面不平度;x1f为前轮垂直位移;x1r为前轮垂直位移;θ为车身绕过质心水平横轴的转角。
2.2 仿真分析
为对某重型牵引车进行不同随机路面输入条件下车身加速度均方根值仿真,根据上文建立的半车模型,搭建matlab/simulink仿真模型,如下图2所示:

图2 仿真模型
该matlab/simulink仿真模型以路面不平度作为随机路面输入模型的振动输入,路面不平度的取值依照GB/T 7031《机械振动 道路路面谱测量数据报告》中相关数据。重型牵引车的主要行驶工况为良好路面条件,因此振动输入分别取B级、C级、D级路面不平度相关参数,对某重型牵引车簧载质量加速度进行仿真分析,仿真结果如下图3所示。
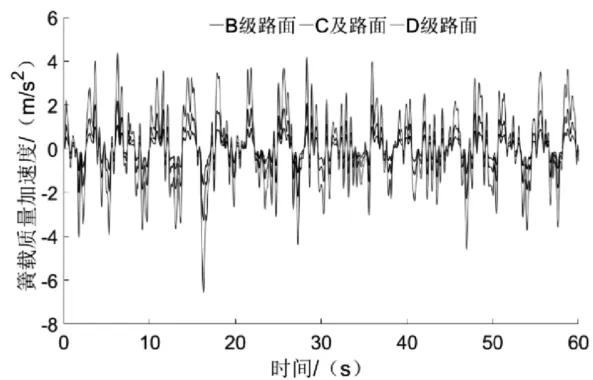
图3 簧载质量加速度
某重型牵引车簧载质量加速度均方根值如下表1所示。

表1 某重型牵引车在不同路面等级下簧载质量加速度均方根值表单位:m/s2
3 分级调控式电磁阀半主动悬架控制策略
分级调控式电磁阀半主动悬架的控制策略为:将电磁阀减振器划分为多级的工作模式,不同工作模式对应不同的输入电流大小,不同的输入电流控制着不同的电磁阀节流孔开度,以此实现不同工作模式下的减振器具有不同阻尼特性。
根据簧载质量加速度均方根值及电磁阀减振器相关参数对电磁阀式半主动悬架系统的工作模式进行初步划分,影响其工作模式划分的主要参数有:簧载质量加速度aj、车速vs、电磁阀线圈温度Ts。
由于重型牵引车主要行驶路况较好,因此簧载质量加速度阈值aj0选择0.3 m/s2,优于B级路面的簧载质量加速度均方根值,具有较好平顺性。
通常车辆车速较低时,其簧载质量加速度也较小,通常具有较好平顺性。而车辆车速较高时,悬架系统应优先保证操纵稳定性,因此需对车速vs进行划分,在此初步定义低车速阈值vsL=10 km/h、高车速阈值为vsH=100 km/h。
减振器的使用温度过高会损坏油封等橡胶件,造成减振器漏油、失效,因此需要对电磁阀减振器本体进行温度检测。通过对电磁阀线圈温度Ts的检测判断是否可以正常工作,电磁阀线圈温度阈值Ts0=80 ℃。
由于实际路面会产生偶发性冲击,导致车辆某一车轮处产生加速度峰值,因此为避免电磁阀减振器的工作模式频繁切换,需要设定振动持续时间t的阈值t0,在此初步选定t0=2 s。
电磁阀减振器的工作模式定义如下表2所示:
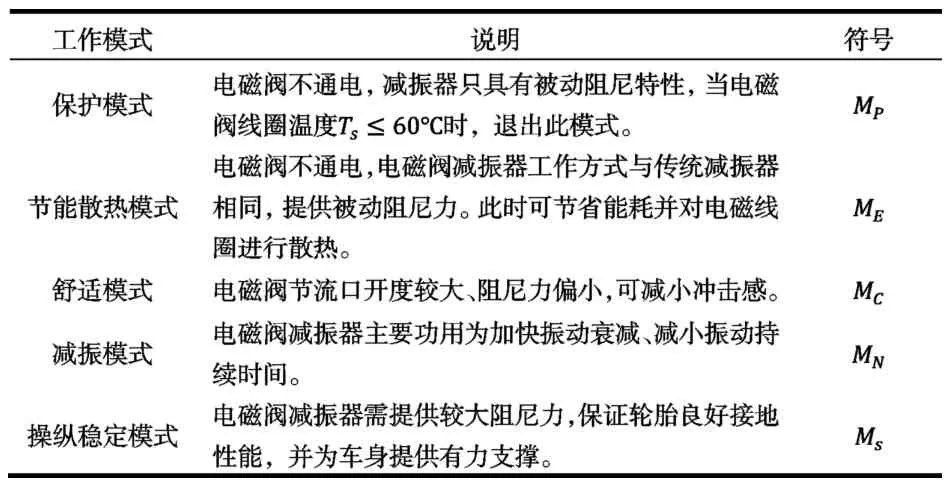
表2 工作模式描述
分级调控式电磁阀半主动悬架的控制策略为:

4 结论
本文首先通过4自由度半车数学模型在matlab/simulink中搭建了仿真模型。然后在B级、C级、D级路面的随机振动输入条件下,仿真分析得到了某重型牵引车簧载质量加速度均方根值。并且定义了簧载质量加速度阈值aj0、低车速阈值vsL、高车速阈值vsH、电磁阀线圈温度阈值Ts0、持续时间阈值t0等关键参数,最后进行了分级调控式电磁阀半主动悬架工作模式的划分,完成控制策略制定,为后续样件台架试验及实车道路试验奠定了基础。
猜你喜欢
时代汽车(2022年19期)2022-10-18
舰船科学技术(2022年11期)2022-07-15
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
北京汽车(2021年1期)2021-03-04
科学导报·科学工程与电力(2019年7期)2019-09-10
小学生学习指导·爆笑校园(2019年6期)2019-09-10
振动工程学报(2019年2期)2019-05-13
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
