CAE软件操作小百科(54)
2021-07-20 23:56冯超
计算机辅助工程 2021年2期
收稿日期:2021-[KG*9〗05-[KG*9〗18
作者简介:
冯超(1998—),男,安徽芜湖人,硕士研究生,研究方向为锂电池电极材料扩散、反应应力及其耦合本构关系,
(E-mail)F_chao@tongji.edu.cn
1 如何在Adams view中设置弹簧的非线性刚度?
首先,通过file/import/file type → test data/create spline/file to read选择位移-阻尼力曲线(即特性曲线),txt文件格式第一列为位移、第二列为阻尼力,在independent column index中填入1。
然后,可以在edit/modify中修改spline列表,在右侧view as中选择plot即可看到该曲线的形状。
最后,通过stiffness coefficient → spline:F=f(defo) 修改弹簧属性,选择刚导入的spline曲线即可。
Bushing在view中无法设置非线性刚度,但在rail、car等template的模板中可以设置为非线性形式。
2 Adams中的接触建模有哪些注意事项?
(1)步长。在模型中有接触力的情况下,使用相对大的步长进行仿真,可能导致收敛问题,使接触计算困难。在积分步长内,大的位移(特别是转动位移)会导致明显的不连续。仿真计算时,把hmax参数设置为相对小的值,可以帮助模型限制位移,从而使计算更容易收敛。
(2)静平衡。在包含接触的模型中进行静平衡求解非常困难,必须考虑合适的建模技术。如果预计对象在静平衡时是接触状态,那么应确保对象在建模初始配置下也是接触状态;如果预计对象在平衡状态时不接触,那么应使对象与接触位置很接近,使得在静平衡迭代过程中可以更容易地检测到接触。使用合适的TLIM和ALIM求解参数设置也能限制扰动,帮助找到静平衡位置。如果很难找到静力平衡,那么应考虑对模型使用动力平衡方法。
(3)薄壳。在一个求解步中,Adams会执行多个积分步以满足预测校正的要求。如果输入的几何厚度很薄,那么有可能出现一个几何体完全穿透到另一个几何体中的现象,导致无效交叉体积的计算、错过接触或生成异常高的接触力,减小hmax可以帮助避免这一问题。
(4)摩擦。摩擦计算是高度非连续的,可能导致数值收敛问题,特别是在相对低速的状态下,摩擦计算困难将加重已经困难的接触计算。只要是有可能先运行模型而不考虑接触的摩擦,就模型运行成功后再考虑摩擦的影响。如果附加的接触力导致数值计算更加困难或仿真速度缓慢,那么可以尝试增加摩擦设置中的参数stiction_transition_velocity 和friction_transition_velocity,也可以减小摩擦因数,有助于积分收敛。
(5)复杂几何。从几何生成器中获取接触几何交集信息的时间,与给定几何的复杂程度相关。有些方法可设置几何限制,尽可能避免不必要的访问,但复杂的几何信息仍然会很在大程度上影响仿真。可以预估接触几何对之间的实际接触区域,根据可能接触的几何区域对几何体进行修剪或分割,在接触定义时只引入分割后可能产生接触的几何体,以避免过于复杂的几何接触。同时,可以将复杂几何替换为几何基元,如球或圆柱体等,这些几何基元之间的接触计算可采用更快的计算方法。
(6)冲击和回弹。在没有办法获取冲击参数的情况下,可采用回弹系数进行分析,回弹系数可通过物理实验或从材料特性中获得。通常,冲击方法的数值连续性更好,并且可以更快获得仿真结果。另外,冲击方法还提供更多的接触行为控制,包括阻尼、弹性指数等参数,可以帮助调整得到数值上满意的结果。回弹系数法一般只用于回弹系数可以获得而冲击参数无法获得的情况。对于给定的几何体,只要有办法可以辅助计算或确定冲击参数,就应该尽量用冲击方法建立接触。
(7)接触的几何定义。有时候,接触几何定义的顺序不同,几何体的相对速度和参与接触几何体的复杂程度也不同,合适的几何定义顺序可以提供更好的计算条件。如果模型计算困难,那么有时调整几何顺序能够使计算得到改进。如果计算结果不同,那么可能是计算公差设置太大,缩小误差公差有时可以得到收敛的结果。
(8)使用SI2积分器。SI2积分器可以计算得到更好的速度结果,因此可以生成更好的、没有尖波的加速度结果。加速度尖波会对接触行为产生不利的影响,
对于大部分接触模型,SI2积分器是较好的选择。
(9)用二维接触近似。只要有可能,尽量使用二维元素定义接触(如点对线、线对线),或在定义SFORCE、VFORCE或GFORCE元素时使用IMPACT函数。
(10)定义接触参数(如刚度、阻尼、弹性指数)。考虑机械系统中每个部件的质量和惯量,以及接触体碰撞后的相对移动速度,以此确定接触参数的定义值是否合适。
3 Abaqus收敛设置的技巧有哪些?
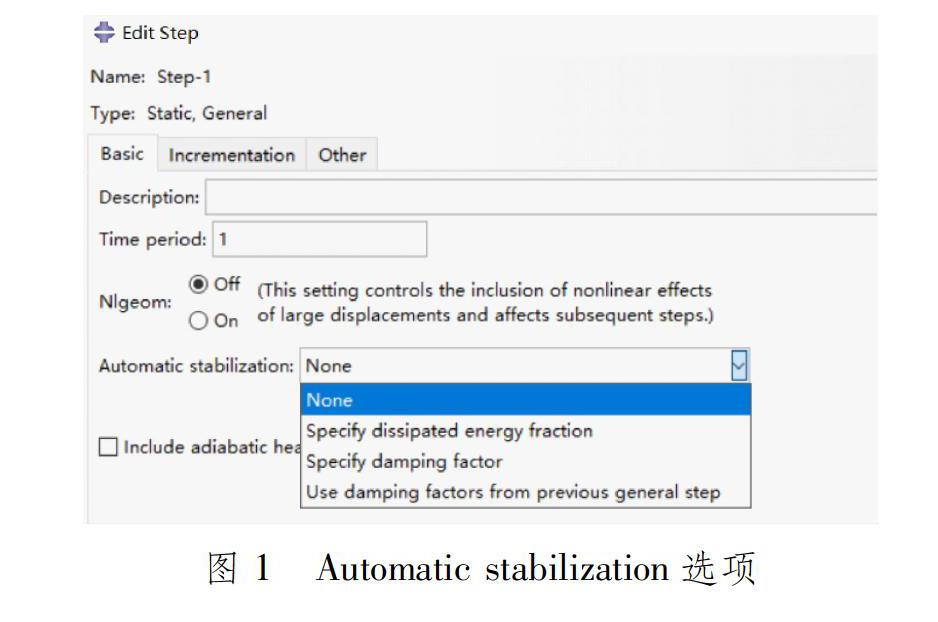
Automatic stabilization在解决实际收敛问题中使用较多,特别是对于橡胶问题(默认不考虑自动稳定),其本质是引入黏性规划系数以提高收敛性能,使得当刚度矩阵K中具有接近0或者小于0的特征值时,也能夠计算得到虚拟解。黏性系数太小、太大都不行,太小不能解决收敛性问题,太大会导致解不正确。Automatic stabilization选项见图1。
Automatic stabilization共有3个非空选项。
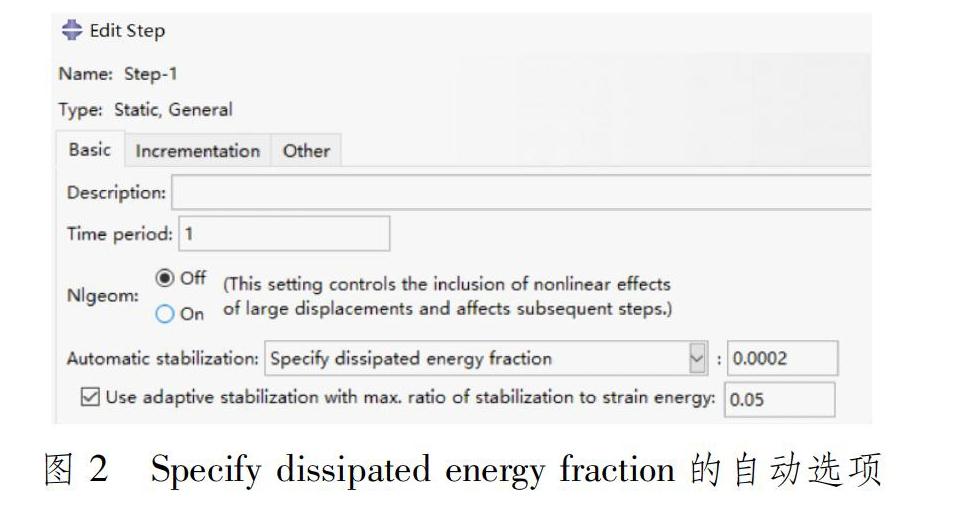
(1)Specify dissipated energy fraction。通过“on the dissipated energy fraction”计算damping factor,当前几步模型都稳定收敛时可用,其实质是超出范围导致不收敛的能量耗散因数,预设值是0.000 2。其关键字为*Static, stabilize=0.000 2, allsdtol=0, continue=NO。
通常,若启用这一选项,则备用的划勾选项“use adaptive stabilization with max.ratio of stabilization to strain energy”默认自动选中,见图2。
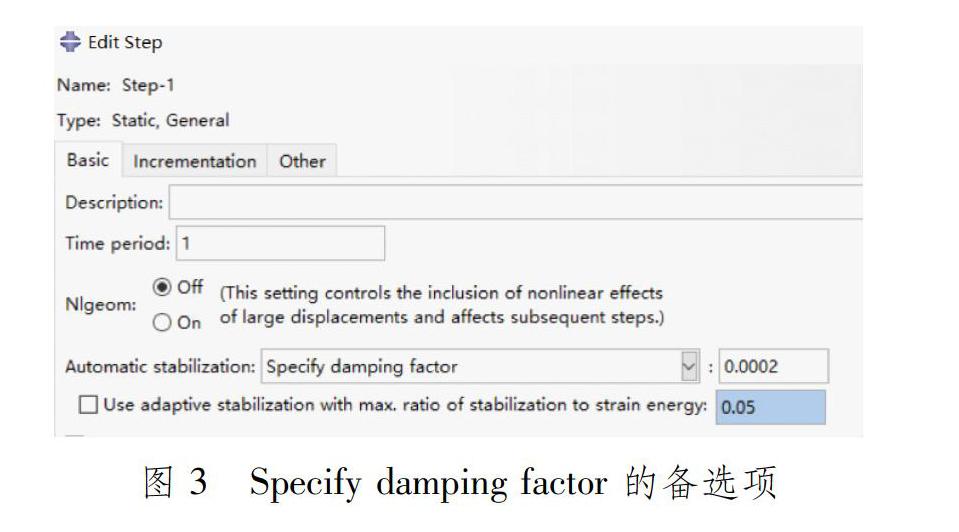
(2)Specify damping factor。该选项是在第一步不稳定或者奇异时使用,即直接指定damping factor的值(一般为定值,但不能太大)。其关键字为
*Static, stabilize, factor=0.000 2, allsdtol=0, continue=NO。
启用这一选项时,备选项的数值可根据之前以及整个分析步的accuracy tolerance调整,见图3。
(3)Use damping factors fromprevious general step。该选项用于第一步不启动、在第二步开始的时候系统自己计算initial damping factors的情况。其关键字为*Static, stabilize, allsdtol=0.05, continue=YES。
启用这一选项时的设置窗口见图4。
猜你喜欢
科学与财富(2020年29期)2020-12-21
小资CHIC!ELEGANCE(2019年29期)2019-09-12
阅读与作文(英语初中版)(2018年10期)2018-12-21
作文周刊·小学二年级版(2018年9期)2018-04-18
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年7期)2018-02-01
新高考·高一物理(2016年10期)2017-07-07
中学科技(2015年10期)2016-01-06
中学生英语高效课堂探究(2008年10期)2008-11-19