基于多传感器信息融合技术的密闭空间环境监控系统研究和设计
2021-07-20 19:31商丽娟
河南科技 2021年4期
关键词:信息融合
商丽娟

摘 要:密闭空间作业存在缺氧、可燃气体爆炸、中毒等事故发生的风险。因此,本文提出了基于多传感器信息融合技术的密闭空间环境监控系统。该系统采用基于CAN总线的三层网络拓扑结构,保证了信息传输的实时性和系统的可扩展性;通过传感器的种类配置和数据信息的融合算法,更好地还原被检测环境的真实情况,有利于系统采取更准确的信息判断和控制策略。
关键词:LabVIEW;多传感器;信息融合;密闭空间
中图分类号:TD712文献标识码:A文章编号:1003-5168(2021)04-0023-03
Abstract: There are risks of accidents such as lack of oxygen, flammable gas explosion, and poisoning in confined space operations. Therefore, this paper proposed a confined space environment monitoring system based on multi-sensor information fusion technology. The system adopts a three-layer network topology based on the CAN bus to ensure the real-time performance of information transmission and the scalability of the system; it can better restore the real situation of the detected environment through the configuration of sensor types and the fusion algorithm of data information, which is helpful for the system to adopt more accurate information judgment and control strategies.
Keywords: LabVIEW;multi-sensor;information fusion;confined space
密閉空间指的是进出口狭小、作业空间狭窄、空气不流通或流通不畅的各类场所,如大型储罐、地下管道、粮仓、舰艇船舱、隧道乃至机舱、航空航天站等[1]。密闭空间作业具有缺氧、气体爆炸、气体中毒等风险,很容易造成人身伤害。可燃性气体(甲烷、一氧化碳和挥发性有机化合物等)是造成密闭空间危险性的重要因素之一[2]。研究表明,温度过高也是密闭空间爆炸的重要因素,影响工作的安全性[3],所以温湿度也是密闭空间必须监测的参量。氧气是维持操作人员生命的主要因素,缺氧和富氧都会对人体造成伤害。
现阶段,相关的环境监测设备考虑了太多的通用性,存在资源配置浪费、技术惯性大、整合先进技术(如信息融合、智能控制技术)成本高和周期慢等特点。一般的设计思路是主控制器收集各种传感器信息并进行简单的分析、处理,最后进行报警、控制外部设备、显示和上传信息。这种设计思路隔断了底层各传感器信息之间的有机联系,丢失了信息有机组合蕴涵的特征,造成信息资源的浪费。
针对以上问题,本课题提出了基于多传感器信息融合技术的密闭空间环境监控系统,旨在通过传感器的种类配置、数据信息的融合算法以及搭建高响应速度的网络结构,挖掘出深层次的传感器信息数据,更好地还原被监测环境的真实情况,从而做出更准确的信息判断和控制决策。
1 系统硬件设计
1.1 系统组成与工作原理
本系统采用三层体系结构,如图1所示。
1.1.1 底层。底层为传感器网络与现场控制层,由各种传感器及外部设备控制模块组成。
1.1.2 中间层。中间层为控制层,控制层使用美国National Instruments公司的CompactRIO系列NI cRIO-9039型控制器,该款控制器是基于现场可编程逻辑门阵列
(Field Programmable Gate Array,FPGA)和运行NI Linux Real-Time操作系统的实时处理器,与控制器局域网络(Controller Area Network,CAN)接口模块NI-9853配合使用,可使系统总线通信响应时间精确至毫秒级。
1.1.3 顶层。顶层为基于LabVIEW软件的中心监控层。LabVIEW是基于G语言的编程软件,最大特点是图形化、模块化,大大提高了程序运行效率,缩短了系统响应时间。
1.2 网络结构
从网络分层来看,为保证通信的可靠性和高速性,系统可分为两级CAN总线网络:一级网络由中心监控服务器与控制器组成,控制器的数量根据传感器的数据调整,采用CAN2.0B的通信协议;二级网络由底层传感器与控制器组成,每个控制器最大可输出16路总线信号,每路总线可连接128个探测器。该网络可根据系统大小进行扩充与删减。
2 系统软件设计
传感器数据融合的定义可以概括为把分布在不同位置的多个同类或不同类传感器所提供的局部数据资源加以综合,采用计算机技术对其进行分析,消除多传感器信息之间可能存在的冗余和矛盾,加以互补,降低其不确定性,获得被测对象的一致性解释与描述,从而提高系统决策、规划、反应的快速性和正确性,使系统获得更充分的信息[4]。本系统软件主要解决的问题是多传感器信息融合技术的设计,利用多个传感器数据共同作用的优势,提高整个系统的稳定性和有效性,降低单个传感器数据的局限性,从而提高数据信息精度,制定更高效的控制策略。
密闭空间环境监控系统信息融合的基本过程如图2所示。每个传感器采集的数据在本地进行A/D转换,然后通过网络传送到控制器。在控制器内,首先进行异常数据筛选。为了得到更真实的数据,要对其进行卡尔曼滤波处理,再进行像素级的数据融合。然后,根据控制目标的不同,对这些数据进行分类整理,得出相应的控制策略。
2.1 控制器软件
2.1.1 异常数据筛选。异常数据筛选包含以下几种情况:本系统中使用的探测器传感原理均为模拟量连续采集,若出现超过5%的数据跳变,则认为该数据受到环境等方面的影响而失真,此时应该放弃该数据点;若数据上传频率与设定频率严重不符,则数据滞后,此时放弃该时间段内所有数据点,填入数据故障代码;探测器多次上传重复数值,则传感器或网络故障,应放弃该时间段内所有数据点,填入故障代码。
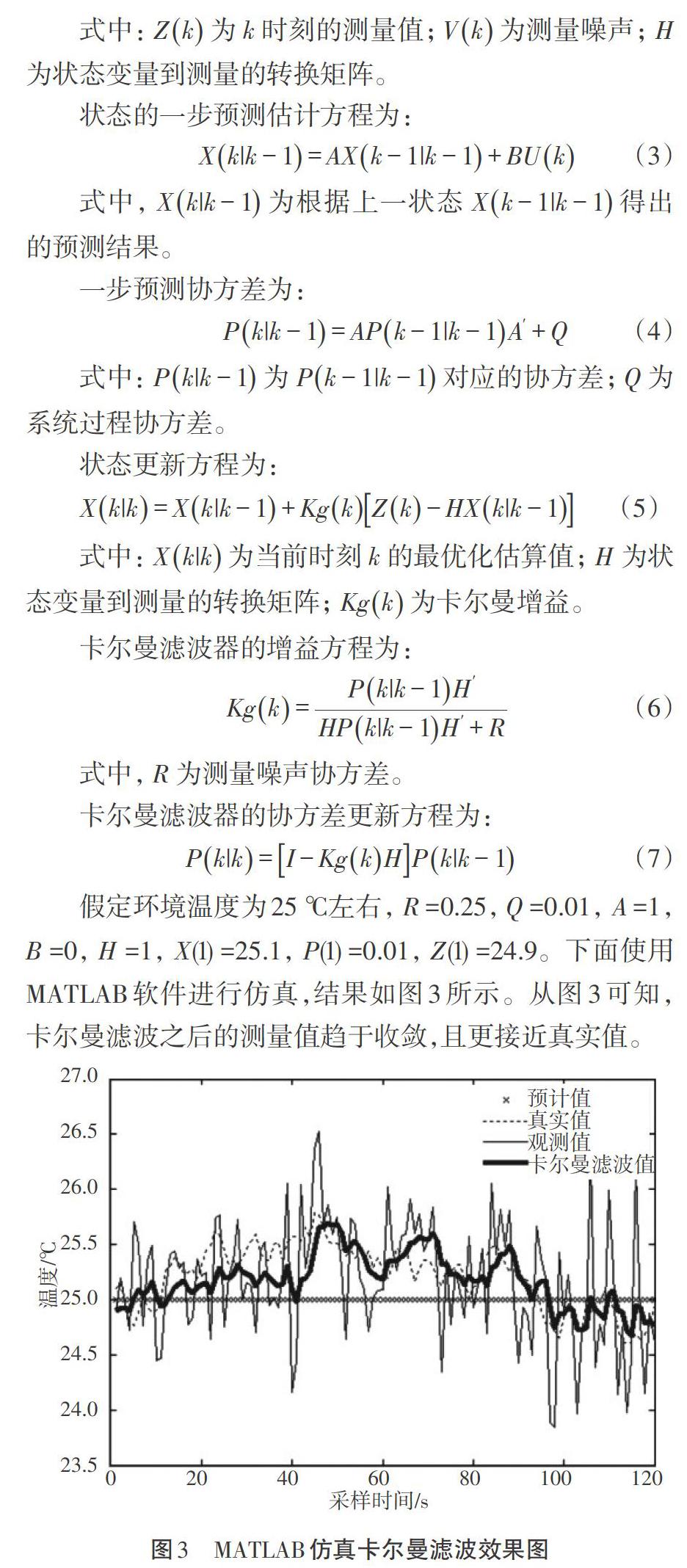
2.1.2 卡尔曼滤波。卡尔曼滤波一般用于探测器低层动态数据融合,1960年由Kalman首次提出,具有线性最小方差估计的一切特点[5]。卡尔曼滤波的基本思想是:通过采用信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,得出当前时刻的估计值。其涉及以下几个方程。
2.2 上位机监控软件
上位机监控软件的作用是对数据信息进行监测、分类。从信息融合模型可以看出,该系统的控制策略群有2个,即气体浓度控制策略群和温度控制策略群。
2.2.1 气体浓度控制策略群。可燃气体探测器用于监测密闭环境中碳氢化合物气体的含量。当可燃气体浓度超过爆炸下限20%LEL及50%LEL时,要发出低限报警与高限报警。
一氧化碳探测器用于监测密闭环境中一氧化碳气体的含量。当一氧化碳浓度超过100 mg/m3或200 mg/m3时,要发出一级报警和二级报警。
氧气探测器用于监测密闭环境中氧气的含量。环境氧气的过氧报警设定值宜为23.5%VOL,欠氧报警设定值宜为19.5%VOL。
上述气体浓度超标后,均需要启动风机进行通风处理,直至浓度恢复正常值。气体浓度控制策略中,可以采用模糊三角形隶属度函数来获取各传感器在对应浓度区段内的基本概率。在实际测量中,可燃气体、一氧化碳、氧气对于风机控制的权值是不一样的,最终得出风机控制策略。
2.2.2 温度控制策略群。温度探测器用于监测环境温度。根据《点型感温火灾探测器》(GB 4716—2005)的规定,温度报警值设定范围为50~65 ℃。当温度超过限定值时,应启动喷淋系统用于灭火。同时,应时刻监测液位传感器的状态,防止由于喷淋系统启动引发水位过高。
2.2.3 上位监控软件设计。本文使用LabVIEW软件开发了基于多传感器数据融合的密闭空间环境监测与控制的上位监控系统,实现了传感器的数据采集、传输及相应外部设备的控制。软件基本分为6个功能模块:数据监测量采集、处理、显示与存储模块;外部设备控制输出模块;实时报警、历史报警显示与记录、查询模块;事件管理模块;用户管理模块;信息发布模块。
3 结语
本文主要设计了基于多传感器信息融合技术的密闭空间环境监控系统。该系统基于CAN总线協议的三级网络总线拓扑结构,与一般的总线相比,CAN总线的数据通信具有可靠性、实时性和灵活性,同时采用基于CompactRIO的LabVIEW控制系统的构建方法,大大提高了系统的实时性和系统的抗恶劣环境能力。本文将多个传感器数据进行异常筛选、卡尔曼滤波处理,以提高数据的实时性与可靠性,以便制定更准确的控制策略。
参考文献:
[1]张艺林,蒋永明.化工企业安全管理[M].北京:化学工业出版社,1992:40-45.
[2]崔克清.化学安全工程学[M].沈阳:辽宁科学技术出版社,1985:30-40.
[3]彭友德.密闭空间内作业安全管理模式探讨[J].化工安全与环境,2001(8):11.
[4]郑立君,刘桂礼.基于LabVIEW和多传感器融合技术的数据中心温湿度监控系统[J].信号与系统,2015(1):34-38.
[5]仲腾.基于卡尔曼滤波的多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2018:17.
猜你喜欢
现代电子技术(2017年3期)2017-03-04
科技资讯(2016年28期)2017-02-28
计算机应用(2016年12期)2017-01-13
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
亚太教育(2016年35期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
湖南大学学报·自然科学版(2015年8期)2015-09-06
物联网技术(2015年5期)2015-07-18
湖南大学学报·自然科学版(2015年2期)2015-04-20