移动式X波段双偏振雷达资料处理
2021-07-19 01:52唐辟如
中低纬山地气象 2021年3期
李 玮,唐辟如,李 皓
(贵州省人工影响天气办公室,贵州 贵阳 550081)
0 引言
移动式X波段双偏振雷达(以下简称雷达)可以发射和接收水平及垂直两个方向的偏振波,除了可以得到回波强度、径向速度和速度谱宽外,还可以获得其特有的差分反射率因子、自相关系数和差分传播相移等与水成物粒子类型、形状及分布密切相关的独立参量[1]。国内在20世纪70年代,已开始利用双偏振雷达开展降水相态识别的分析研究[2-4],逐步形成了应用较广的模糊逻辑算法[5],王致君等[6]提出了双偏振雷达在人工影响天气作业指挥及效果检验方面的应用前景。在冰雹外场观测中,能够提前布设在冰雹路径之上,精准跟踪目标云系,探测云中各种相态粒子的分布,并做冰雹识别[7]。杨哲等[8]对比了双偏振雷达和C波段天气雷达回波强度的差异,认为两者对距离较近的观测目标回波强度值一致性较好。曹水等[9]采用贵阳C波段雷达和移动X波段雷达数据,通过分析两部雷达回波强度的空间分布、时间变化波动等特征参量,以验证在复杂山地环境下,移动X波段天气雷达对冰雹云天气过程的探测效果。由于雷达观测位置的变化、雷达信号本身的涨落以及降水系统的演变和移动等原因会造成雷达测量的参数产生较大的脉动,为消除这种脉动的影响,需事先对雷达探测到的资料进行快速处理(差分反射率因子系统误差标定和原始资料平滑滤波处理),以便及时进行冰雹云监测和识别,进而科学指挥开展人工防雹作业。
1 双偏振雷达差分反射率因子(ZDR)系统误差的标定
差分反射率因子(ZDR)的大小取决于云中粒子的介点常数和形状,是水平和垂直两个方向回波的反射率因子之比的对数值,其精确与否,直接影响相态和冰雹的识别结果。因此,需对差分反射率进行标定处理,找出偏振雷达水平通道和垂直通道的系统误差。目前主要的标定方法有3种:太阳法、信号源法和小雨法[10],太阳法是一种传统的标定方法,其原理是当雷达天线对准太阳时,太阳辐射产生的水平和垂直极化功率相等,即ZDR为0 dB,ZDR的测量值即为系统误差,该方法只能标定雷达接收通道的ZDR系统误差,而没有考虑雷达发射通道的ZDR系统误差,另外太阳的噪声功率太小,不利于获得两个方向通道的隔离度等信息。信号源法原理与太阳法相似,将雷达天线对准外置水平偏振波信号源,垂直通道接收到的交叉偏振波与共偏振波强度之差就是ZDR系统误差。由于贵州移动式X波段双偏振雷达天线扫描模式是VCP21模式,雷达天线不能采用垂直扫描的方式确定雷达ZDR系统误差,为此采用小雨方法开展偏振雷达系统误差ZDR的标定。具体方法为:采用仰角0.5°PPI和仰角1.5°PPI探测的小雨数据,通常认为小于25 dBz的降水回波视为小雨回波,因此利用小于25 dBz的小雨气象回波,测定ZDR系统误差。由于差分反射率(ZDR)值随仰角的抬升而减小,并趋近于零,见式(1)。
(1)
由于目前移动式X波段偏振雷达天线扫描模式是VCP21模式,天线0°、0.5°、1.5°扫描时,若ZDR(0°)=1 dB,根据(1)式ZDR(0.5°)=1.000 08 dB,ZDR(1.5°)=1.000 73 dB,因此可以认为0.5°和1.5°的仰角对ZDR系统误差的测定几乎没有影响。
为了测定ZDR系统误差,对2016年8月15日20时16分雷达观测的层状云数据进行分析。雷达回波见图1:
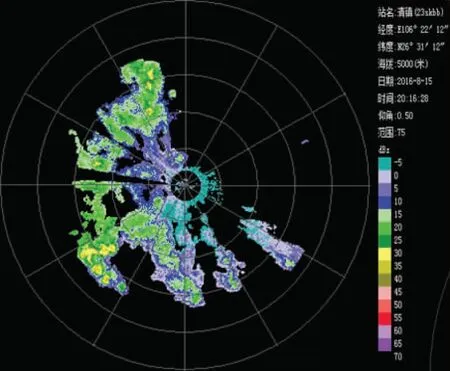
图1 2016年8月15日20时16分雷达回波强度
为了降低大于25 dBz的回波对ZDR系统误差的标定,对上述回波进行如下处理,选取方位215°~270°,距离在15~30 km回波进行统计分析,分析结果如图2。

图2 小于25 dBz时Z-ZDR分布
从图2中可以看出,回波强度Z在0~10 dBz时,差分反射率因子均值Avg(ZDR)=-0.410 9,方差Var(ZDR)=0.871 9;回波强度Z>10 dBz时,差分反射率因子均值Avg(ZDR)=-0.421 5,Var(ZDR)=0.768 0,结果表明,差分反射率因子均值都为负值,与理论结果接近零值相悖。为了降低非气象回波对标定的影响,在剔除非气象回波的情况下,对数据进行重新统计,统计结果见图3a,得出的ZDR均值后,对ZDR进行平移处理见图3b,图3b中,均值Avg(ZDR)=-0.059,方差Var(ZDR)=0.5,满足理论ZDR的波动范围。

图3 剔除非气象回波的情况下Z-ZDR分布
在实际探测过程中实时监测ZDR系统误差,需要对ZDR实时探测数据进行标定,供后续冰雹识别用,标定方法如下:在0.5°和1.5°仰角,将ZDR值从-8~8 dB按0.2 dB间隔分级,统计各级ZDR个数,ZDR个数百分比大于5的计入ZDR平均值计算,排除ZDR奇异值对ZDR系统误差的影响。
2 双偏振雷达资料平滑方法的分析
对雷达探测到的原始资料需要进行平滑滤波处理,这是目前在进行雷达资料质量控制中的重要一步,对于双偏振雷达来说,这种处理就显得更为重要,如何选择合适的窗口和尺度,对资料的后续应用有着重要的意义。在雷达资料的预处理中,对雷达资料沿径向的平滑是一个最基本也是最重要的步骤,合适距离上的平滑对于有效消除雷达资料的脉动、消除回波信号的涨落都有很好的作用。但是如果径向平滑的距离太短,就不能达到很好的效果,平滑的距离太长,又会损失实际回波的信号,给后面的分析带来误差。因此如何选择合适的径向平滑距离是一个需要讨论的问题[11]。
为了研究问题的方便,选取层状云RHI中1.44°仰角径向回波分析处理,见图4a和图4b,从回波强度(ZH),差分反射率因子(ZDR)、自相关系数(ρhv)和差分传播相移(φDP)分布图(图略)中可以看出,4个参量都有毛刺存在,因此需要对数据采取相应的毛刺处理,处理方式为直接将奇异值剔除。经过消除奇异数据后4个参量的分布见图5,从图中可以看出,奇异数据剔除后,各个数据分布连贯性较好,符合预期。

图4 层状云降水回波(a),1.44°仰角回波(b)

ZH-ZDR变化廓线 ZH-ρhv变化廓线 ZH-φDP变化廓线
将所有参量叠加在一张图上(见图6),当信噪比SNR<10 dB时,相关系数开始逐渐减小,且脉动范围明显增大,ZDR和ρhv在SNR<10 dB时也同样具有脉动范围增大的特征。根据上述特征,可以初步认为当信噪比SNR≥10 dB时,雷达测量的各偏振参量值可信。

图6 消除奇异数据后层状云降水1.44°仰角参数随径向变化叠加
从图6中可知,各个参量值还是有一定的脉动性,为了降低脉动性,对 RHI层状云降水1.44°仰角各参数分别进行3、5、7、9、11点平滑处理,平滑处理后的结果见图7,从图中可以看出,平滑点数越多,参量的脉动性减小,但是这个并不是意味着平滑点数越多越好,如差分反射率,其值本来就偏小,平滑过多,将丢失真实的差分反射率信息。
图7能较好地反映出整体趋势,却无法直接显示具体平滑效果,为了对平滑结果进行更直观的对比,通过调整纵坐标值,分别对ZH、ZDR、φDP和ρhv重画,见图8。

图7 ZH、ZDR、φDP 和ρhv在径向上分别经过3点、5点、7点、9点、11点平滑后得到的分布廓线
从图8可知,随着平滑点数的增加,资料的脉动性减弱,经过平滑后得到的廓线就基本上能消除掉单库之间的资料脉动,同时还能显示出与原始资料相似的廓线分布趋势。随着平滑点数的增加,虽然有效地消除库间的资料脉动现象,但是此时的廓线过于平直,无法反应原始数据廓线上的一些大梯度区,表明随着平滑点数的增加会损失实际回波的信号,不能有效地反映实际的回波变化特点。从图8中可以看出,3点平滑,各参量脉动性仍不能有效消除,7点平滑基本上可以反映出原始资料的特性,11点平滑后,各参量都过于平直,尤其是相关系数,因此,本雷达中采用7点平滑。
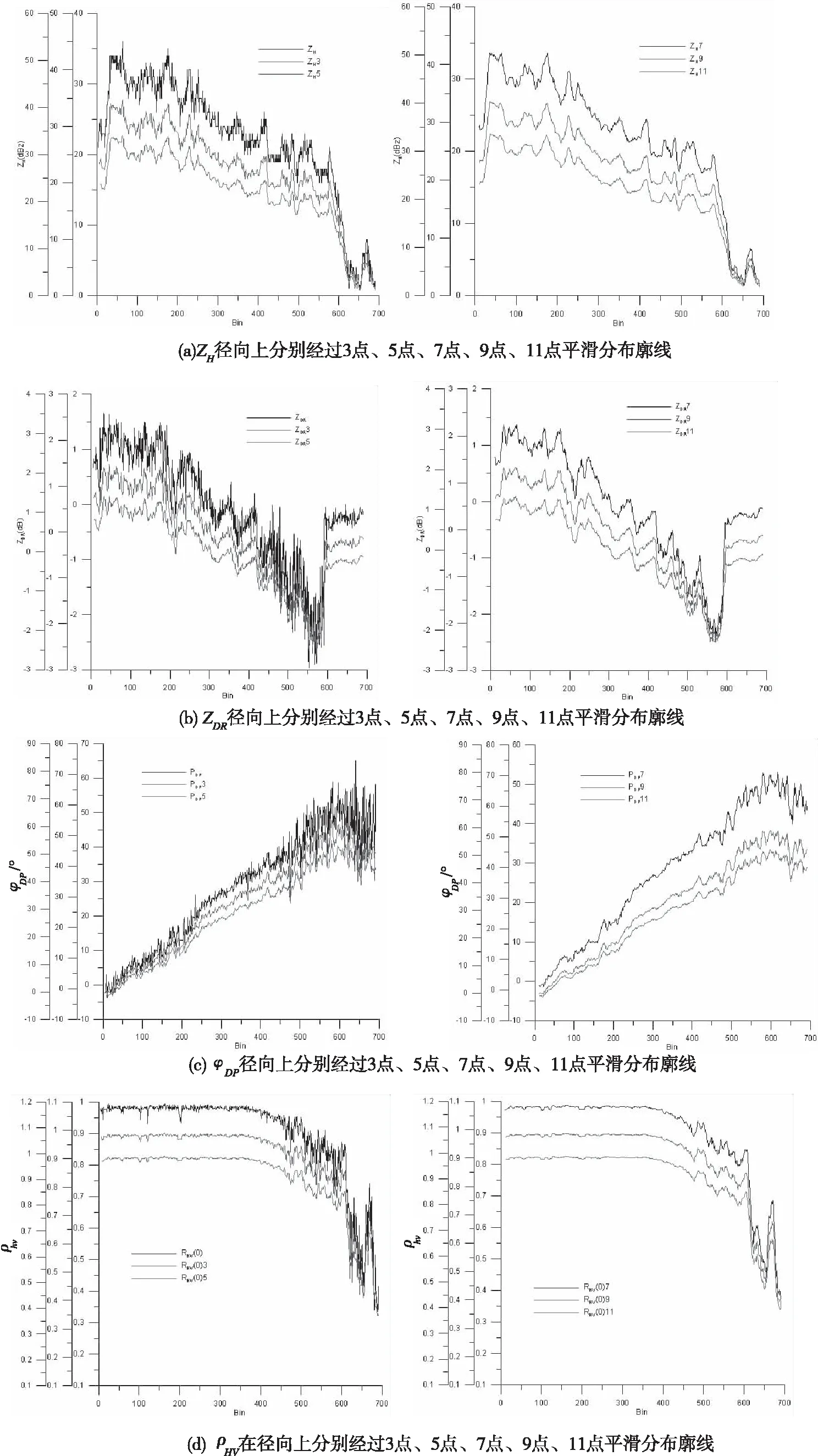
图8 ZH、ZDR、φDP 和ρHV平滑后分布廓线
3 结论与讨论
①对于天线扫描模式是VCP21模式的移动式X波段双偏振雷达,使用小雨法来标定差分反射率因子(ZDR)系统误差是有效的。
②在实际冰雹探测过程中需实时监测ZDR系统误差,并对ZDR实时探测数据进行标定,以排除ZDR奇异值对ZDR系统误差的影响。
③将各参量奇异值剔除后,当信噪比SNR≥10 dB时,雷达测量的各偏振参量值可信。
④平滑处理既要考虑减小参量的脉动性,也要避免丢失真实信息,尤其对于数值本来就偏小的差分反射率,故本雷达中采用7点平滑。
猜你喜欢
高原山地气象研究(2020年3期)2020-07-16
初中生世界·九年级(2020年2期)2020-04-10
北京航空航天大学学报(2017年4期)2017-11-23
成都信息工程大学学报(2017年3期)2017-11-09
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年6期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
科技视界(2016年15期)2016-06-30
成都信息工程大学学报(2016年6期)2016-06-01
装备环境工程(2015年5期)2015-02-28