
基于RTK-GPS导航的燃料电池动力无人艇方案研究
2021-07-19 02:57吴骁,王颖
船电技术 2021年6期
吴 骁,王 颖
基于RTK-GPS导航的燃料电池动力无人艇方案研究
吴 骁1,2,王 颖1,2
(1. 武汉船用电力推进装置研究所,武汉 430064;2. 武汉市氢燃料电池工程技术中心,武汉 430064)
为提高整体质量体积功率密度,延长无人艇续航时间和精确定位,利用风冷氢空燃料电池作为主要动力源,以RTK-GPS系统作为定位导航方案,设计了一种结构简单无污染排放的燃料电池无人艇方案,通过样机实验,基本完成方案设计目标。
RTK GPS 无人艇 燃料电池
0 引言
燃料电池动力系统以其高效、节能、零污染排放的优势受到越来越多的关注。随着丰田、本田、现代等国际汽车大厂的研究推广,车用燃料电池系统已初具商业实用性。燃料电池系统的可靠性、实用性也逐步得到大众的认可。
在中小型无人艇动力系统上,传统方案是采用小型内燃机或蓄电池组。对于中小型无人艇来说,以内燃机作为动力源具有噪声大、尾气污染等缺点,且设备结构复杂。若以蓄电池组驱动电机作为动力源则整体质量体积功率密度较低,由锂电池电动汽车方案及其他电池放电试验可知选用全锂电池组其续航也不理想,并且电池组的充电时间较长也限制了该方案的推广实用[1]。
本文设计的燃料电池无人艇采用风冷氢空燃料电池,利用高压氢气瓶作为气源,气瓶为碳纤维复合材质,质量较轻,使得整体的能量密度较高。风冷电堆系统结构简单,便于使用和维护。无人艇采用了较为先进的RTK-GPS定位方案,可实现分米级的定位精度。
1 无人艇总体架构
水面无人艇一般可用于执行水质监测,海防侦查等任务[2],可携带多种传感器(如摄像头),本无人艇设计采用两套通信方案,一是利用无线网桥与岸基控制台进行运动控制指令通信及摄像头视频信息或其他传感器信息通信,二是利用无线电台与岸基RTK基站进行GPS定位信息通信,无人艇主控制器为PLC,用于接受控制指令和处理GPS电台信息,无人艇信息及控制系统架构如图1所示。

图1 无人艇控制系统架构
系统动力来源为3 kw风冷燃料电池电堆系统,系统附带一48 v12ah小型锂电池作为启动电源和辅助电源。燃料电池系统为包含两台850 w电机在内的所有设备进行供电,无人艇通过接受岸基控制台指令调整两台电机的转速差进行转向,其总体外观结构简图如图2所示:
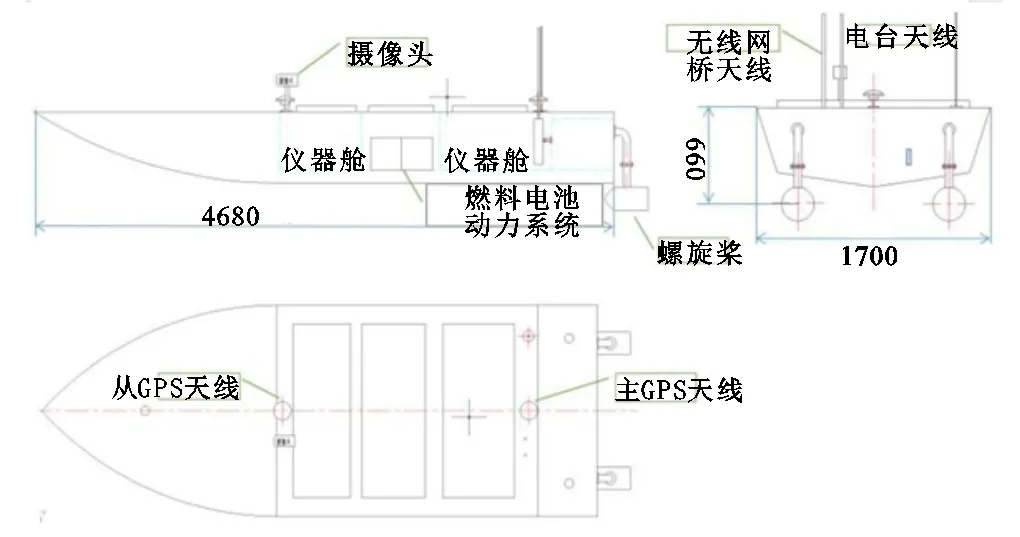
图2 无人艇外观结构简图
2 导航定位方案选择
GPS即全球定位系统,由美国于上个世纪90年代组网完成,传统的民用GPS系统接收机接受太空中至少4颗卫星信号进行定位,但是民用级单套接收机的定位精度在天气良好的情况下也只能达到15米左右,对于在野外河道、湖泊等地区使用的无人艇来说定位误差太大。因此,本方案无人艇采用目前广泛应用的RTK-GPS定位技术来获得对无人艇分米级的定位精度。
RTK-GPS技术是一种较为成熟的实时精确定位技术,多用于野外测绘或导航系统。一套RTK-GPS系统有一个基准站和多个接收站。RTK系统工作时,固定基准站将其固化的坐标和当前观测值实时的发送给接受站,接受站接受到固定基准站的载波相位信息后和自身的GPS信号进行比较,并利用差分校准技术实时的解算数据,在信号良好的条件下可获得分米甚至厘米级的精确定位[3]。岸基定位基站由GPS接受器和电台发送器组成,岸基GPS接受器处于固定位置,采用长时间测量GPS信号后求均值固化定位数据,无人艇GPS电台接受载波相位信息后在结合自身的定位信息通过差分校准得到精确定位坐标。一对多RTK-GPS无人艇定位系统架构示意图如图3所示。

图3 RTK-GPS定位导航系统架构
除了精确的定位信息外,无人艇艇载GPS接收器还可以实时解算出航向信息,如图3所示,无人艇有主从两套GPS接受天线布置于轴线上,可形成由主天线到从天线的一条向量,GPS接收机可利用两套天线的数据进行差分解算,从而获得当前无人艇轴线相对于正北方向的偏差角,从而确定航向。
3 动力方案选择
为了获得较高的整体能量密度和更长的续航时间,本方案采用燃料电池系统替代传统无人艇的电池组或小型内燃机系统。根据无人艇驱动螺旋桨的功率和其他传感器等用电设备的功耗估算,采用3 kW风冷燃料电池电堆,输出48 V直流电。电堆采用具有高性价比的复合双极板工艺,3 kW电堆系统的重量约为6 kg,相较于石墨堆来说功率密度更高,相较于金属堆来说价格更低且可靠性也更高。电堆系统利用合理分布的轴流风扇对阴极提供空气并且自动调整风扇转速使得电化学反应维持在合理的温度,电堆外形如图4所示。

图4 风冷燃料电池电堆外形
燃料电池电堆需要的是恒压,稳定的气源。本方案应用于无人艇系统则应选用高质量储氢密度的气源。目前成熟的高质量密度供氢方式为高压储氢技术,国内目前成熟的高压储氢气瓶为35 Mpa碳纤维复合材料气瓶,该型气瓶20 L可储氢约630 g,每个气瓶可供给3kW电堆满功率使用170分钟。瓶身为圆柱体重7kg,瓶口集成组合减压阀,可将35 Mpa压力的氢气减压为0.05Mpa供给电堆使用,组合减压阀重量约200 g,每个20 L碳纤维气瓶长660 mm,直径230 mm,无人艇上可根据任务需求的续航放置多个20L级别气瓶。碳纤维气瓶及减压阀外形如图5所示。

图5 35 Mpa碳纤维瓶阀一体套装
燃料电池输出特性较软,不能快速响应负载功率变化要求并且不能长时间工作在大于额定功率工况下[4],因此本方案配备了一小型48 V锂电池作为启动电源和辅助电源,负责系统功率变化的“削峰填谷”。系统混合动力架构如图6所示。

图6 无人艇混合动力输出架构
由图1、2无人艇总体架构可知无人艇两套螺旋桨推进系统由燃料电池系统供电,由PLC主控制器控制启停和转速,PLC通过无线网桥接受到岸基控制台的目标位置信息,实时的解算出与无人艇的相对距离和航向,通过控制两台螺旋桨电机的不同转速,调整航向使得无人艇航向对准目标位置,PLC还可读取螺旋桨电机自带的转速传感器从而对输出转速信号进行校正,无人艇位置及航向控制原理图如图7所示。
4 样机实验
依据以上设计和常用淡水湖无人艇结构,本项目利用玻璃钢材质制作了一艘适合武汉地区实验的无人艇样机,并在洪山区喻家湖进行了初步的动力系统、导航定位系统和简易遥控系统实验。实验前已在岸边固定校准过GPS基准站,利用上位机C#-winform开发了一个简易的无人艇轨迹监控界面,可在卫星地图上实时的显示当前无人艇的位置,同时可设置无人艇电机的转速差来实现简易方向的控制。实验图片如下所示:
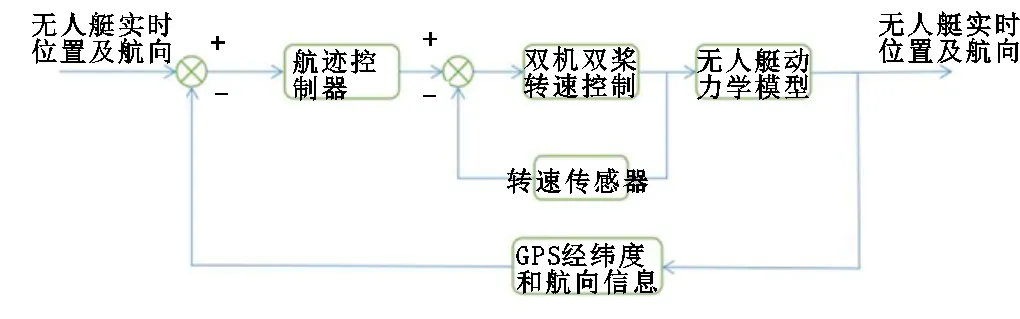
图7 无人艇位置航向控制原理图

图8 无人艇码头下水调试
实验中,GPS系统定位准确,无人艇与上位机之间通信正常,能在上位机卫星地图界面准确的显示当前位置和航向,燃料电池动力系统能充足的提供无人艇所需的动力,上位机控制界面能完成基础无人艇航向的操控,避开水面的障碍物,基本完成方案设计目标。圆圈为湖面障碍物示意图。

图9 无人艇湖面避障运动轨迹

图10 无人艇远程遥控运动位置坐标
5 小结
本文对燃料电池无人艇方案进行了简单研究,在导航系统上选用了电动无人艇成熟的RTK-GPS导航方案。在动力装置上,采用风冷燃料电池搭配碳纤维高压气瓶,实现了较高的质量能量密度和体积能量密度,大幅延长了无人艇的续航时间。随着以后材料技术的发展,电堆可以更换为重量更轻且体积更小的金属堆,碳纤维气瓶灌充更高压力的氢气,使得整体能量密度更上一个台阶。
[1] 李家良. 水面无人艇发展与应用[J]. 火力与指挥, 2012(6): 203-205.
[2] 李宁宁, 吴天昊, 蔡群. 美国海军无人系统浅析[J]. 飞航导弹, 2010(7): 48-54.
[3] 张照杰. 网络RTK定位原理与算法研究[D]. 山东:山东科技大学, 2007.
[4] 崔志祥. 燃料电池多旋翼无人机混合动力系统设计[D]. 浙江: 浙江大学, 2018.
Overall Framework Design of Fuel Cell Powered Unmanned Surface Vessel Based on RTK-GPS Navigation
Wu Xiao1,2,Wang Ying1,2
(1.Wuhan Institute of Marine Electric propulsion, Wuhan 430064,China; 2.Wuhan Hydrogen Fuel Cell Engineering Research Center, Wuhan 430064,China)
P228.4
A
1003-4862(2021)06-0095-03
2020-11-10
吴骁(1994-),男,硕士。研究方向:燃料电池。E-mail:759389913@qq.com
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年1期)2022-02-16
少儿画王(3-6岁)(2021年2期)2021-09-13
劳动保护(2018年8期)2018-09-12
纤维复合材料(2018年4期)2018-04-28
电源技术(2015年5期)2015-08-22
电源技术(2015年7期)2015-08-22
电测与仪表(2015年5期)2015-04-09
电源技术(2014年5期)2014-07-07
电源技术(2014年9期)2014-02-27
