一种角度约束制导策略方法研究
2021-07-19 08:05颜飞
科学与信息化 2021年19期
颜飞
江南机电设计研究所 贵州 贵阳 550009
引言
在现代信息化战场中,电磁干扰(电子对抗、电子干扰等)作战因使用不同频率的电磁波干扰使用电磁波进行测量和传输的雷达、导引头、引信等高精度测量和数据传输设备而备受关注。因此,作为战场上的攻方来说,大型远距离支援干扰机施放大面积干扰使得相关成本大幅增加,而作战飞机自身携带相关干扰设备(即自卫式干扰目标),实时依据战场态势施放一定角度及一定功率的干扰使得作战效费比大幅减少,因此,自卫式干扰已演变成攻方主要作战样式。当自卫式干扰目标施放的干扰电磁波频率与探测雷达或制导雷达、导引头等电磁波频率相近或相同时,会引起地面雷达、弹上导引头等高精度测量设备无法高精度测量目标与雷达的相对距离、目标与导弹相对信息,只能被动跟踪干扰目标,被动跟踪信息上传至指挥控制系统后,指挥控制系统因其未获得目标距离信息,无法准确判断目标是否进入导弹杀伤空域,进而无法准确判断导弹发弹时机,时常出现过早发射导弹或过晚发射导弹,过早发射导弹使得目标位置远大于导弹拦截区域,无法对目标进行有效杀伤;过晚发射导弹则可能使导弹来不及反应而无法有效杀伤目标,上述两种情况均可能导致导弹拦截失利。
弹上控制指令解算设备在无法获取目标与雷达的相对距离、目标与导弹相对信息后,若仍使用复合制导拦截,即导弹发射后,初始阶段一般使用程序指令制导或初始弹道纠偏指令制导,中制导段一般使用地面雷达测量相关信息解算出弹目视线角速度、弹目视线角度及弹目相对速度等信息,运用比例导引或修正比例导引进行制导,末制导段一般使用导引头信息进行比例导引制导,导弹整个飞行过程中,必然存在初中制导指令交接班、中末制导指令交接班。因导弹进入自卫式干扰目标干扰区域后,可能会导致复合制导在指令交班时出现无法交班的情况,丧失复合制导拦截导弹优势,而使用单一导引方法(例如:三点法、前置法、半前置法及速度导引等)拦截目标时,则会导致武器系统杀伤区斜距大幅减少,不利于拦截中远距离目标。因此,当目标施放电磁干扰后,如何获取目标与雷达的相对距离、目标与导弹相对信息用于制导,完成武器系统的拦截任务已变成现代武器的主要研究方向。
本文主要研究导弹探测系统特别是弹上导引头如何避开目标干扰区域来拦截干扰目标的问题。因此,在研究的过程中,本文以自卫式干扰作为典型目标的干扰样式,同时以某型号地空导弹武器系统为背景,设定自卫式干扰目标的干扰区域宽度为45°,且保证干扰电磁波能压制制导雷达和导引头,以此来设计相应的拦截此类型自卫式干扰目标的制导控制策略,完成相关拦截任务[1]。
1 俯冲攻击干扰目标的必要性
复合制导拦截干扰目标过程中,导弹发射初始阶段,一般使用程序指令、位置导引等方案将导弹引导至便于制导指令或制导信息交接班的位置,而后,导弹完成初始制导到中制导交接班,导弹进入中制导阶段后,基于目前弹上设备运算能力、运算速度考虑,中制导阶段一般使用基于比例导引或修正比例导引方法进行制导,将导弹导引至适合满足导引头探测、跟踪位置。导弹到达满足导引头探测、跟踪位置后,弹上设备控制导引头开机,导引头随即完成目标搜索、跟踪,当导弹、目标在导弹与目标连线上的相对距离小于等于导引头稳定跟踪距离时,弹上设备控制导引头回波开机,导引头稳定跟踪目标,输出导弹与目标连线上的视线角、视线角速度等信息,弹上设备依据导引头输出的弹目视线角及角速度信息,依据相关导引方法,形成末制导指令。末制导指令稳定输出后,弹上设备开始进行中末制导交接班,转入末制导阶段。
当自卫式干扰目标水平直飞时,因其干扰区域宽度为45°,故其头部干扰区域为-45°至45°之间。从中末制导交班到弹目遭遇,导弹俯冲角度会进入干扰目标头部干扰区域,导引头只能被动跟踪干扰目标,不能完成主动跟踪,也不能有效测量弹目相对运动信息,这可能会引起制导精度下降,甚至脱靶。
因此,针对如何规避导弹末制导段进入干扰区域的问题,在原有古典制导律基础上,参考目前垂直发射导弹初始阶段制导控制策略,即导弹弹射出筒后,弹上设备基于导弹实际姿态角与期望姿态角,在制导控制回路中加入角姿态控制指令,使导弹能快速完成转弯,便于后续导弹制导控制。在中制导阶段,加入角姿态控制回路,使得中制导段导弹有一定的平飞区域,满足中末制导交接班后,导弹进入末制导,迅速转弯飞向目标,从而保证末制导阶段,导弹弹道倾角大于45°。
2 角度约束制导策略设计
2.1 导弹姿态控制指令设计
以导弹脱落时刻为时间零点,设姿态控制指令加入角姿态控制回路的时刻为,加入姿态控制指令时刻的一个控制回路周期内,确定俯仰角、偏航角、滚转角的初值。而在导弹飞行过程中,导弹的俯仰角、偏航角、滚转角由用四元数表示的方向余弦矩阵与用姿态角表示的方向余弦矩阵对应关系反算得到。
依据本论文的目标基本特性可得,期望导弹在弹目遭遇时弹道倾角小于-45°,由期望的俯冲角与弹道倾角的关系可得,角姿态控制回路指令结束时导弹期望的姿态角为根据期望姿态角与实际姿态角关系可得,对于俯仰角来说,导弹飞行过程过程中,其角差可能会达到90°,如果此时强行将俯仰角拉至期望状态,则导弹姿态转弯所需的需用过载远大于导弹由其结构、气动等关系确定的可用过载,导弹姿态无法达到期望状态,导弹瞬时不可控,造成脱靶,因此,依据垂直转弯结束时期望的姿态角,结合导弹实际姿态角及可用过载等方面,确定转弯期间期望姿态角过渡过程,保证转弯过程中导弹需用过载小于导弹可用过载。
与此同时,姿态角之差由姿态变换可得,首先将弹体坐标系变换到捷联惯性坐标系,再将捷联惯性坐标系变换为期望姿态角时的弹体坐标系,即可得姿态角之差,进而可得姿态控制指令。
2.2 中制导弹道设计
为保证导弹中制导时导弹有一定的平飞区域,为后续弹道俯冲做准备,因此,导弹完成初始制导后,需将导弹上抛至一定的高度,而后转入平飞阶段。与此同时,因中制导段使用比例导引或修正比例导引方法,在比例导引作用下,导弹逐渐飞向目标,因此,在保证导弹稳定的情况下,减小中制导段比例导引有效导航比,进一步实现导弹高抛飞行[2]。
2.3 角姿态控制指令接入和结束时间确定
弹目遭遇时,若导弹飞行弹道的弹道倾角大于-45°,说明导弹在未遭遇时已经进入干扰目标的头部干扰区域。基于此,本论文设计中制导弹道在未加入角姿态控制指令前,设计在竖直平面内近似为一条抛物线弹道,当导弹达到平飞弹道区域后,加入角姿态控制第一次接入指令,改变导弹飞行姿态,进而改变导弹飞行弹道,实现导弹由高抛飞行到平飞区域的过渡。当导弹形成平飞弹道时,取消角姿态控制指令,保证导弹水平飞行。当弹目相对距离小于等于导引头稳定跟踪距离时,导引头回波开机前,设计角姿态控制指令二次接入,实现导弹由平飞弹道到俯冲弹道的快速转弯,干扰目标较快进入导引头搜索、跟踪视场,保证导引头的正常工作,导引头稳定跟踪目标后,断开角姿态控制回路,保证导弹在制导指令作用下改变其姿态,形成末制导所需的过载,控制导弹飞向干扰目标。从而实现导弹俯冲攻击。
2.4 指令过渡设计
依据第3.3节角姿态控制回路指令接入和结束时间设计结果,依据期望姿态角与实际姿态角的差值的不同,当期望姿态角与实际姿态角的差值较大时,接入角姿态控制回路后,地面寻的指令与角姿态回路控制指令共同作用稳定控制回路,直到导引头寻的指令到来且满足交班条件后,才将地面寻的、角姿态控制回路指令交到导引头寻的指令;当期望姿态角与实际姿态角的差值较小时,接入角姿态控制回路后一段时间内,完成地面寻的指令与角姿态控制回路指令的交班,当导引头寻的指令且满足交班条件后,完成角姿态控制回路指令到导引头寻的指令交班。由此,保证导弹需用过载小于可用过载的条件下,依据不同的姿态角之差,完成地面寻的指令的过渡设计。
3 仿真结果分析
为更好地验证加入角姿态控制指令的制导策略的制导性能,仿真中以某项目弹体模型、引入指令模型等为基础进行数字仿真。
仿真中,设定导弹初始发射高低角为55°,导弹初始方位角为0°,设定发弹时刻目标初始距离为30km,目标飞行高度为3km,目标水平直飞速度为300m/s,以此来开展数字仿真验证。
由图1可得,导弹发射时刻,导弹初始高低角为55°,弹幕遭遇前10s时,导弹俯冲角度≤-45°,此时导弹离开自卫式干扰目标干扰区域,导引头能正常测量目标相关信息,为末制导提供制导控制用的相关信息,满足导弹规避干扰而拦截自卫式干扰目标的需求[3]。
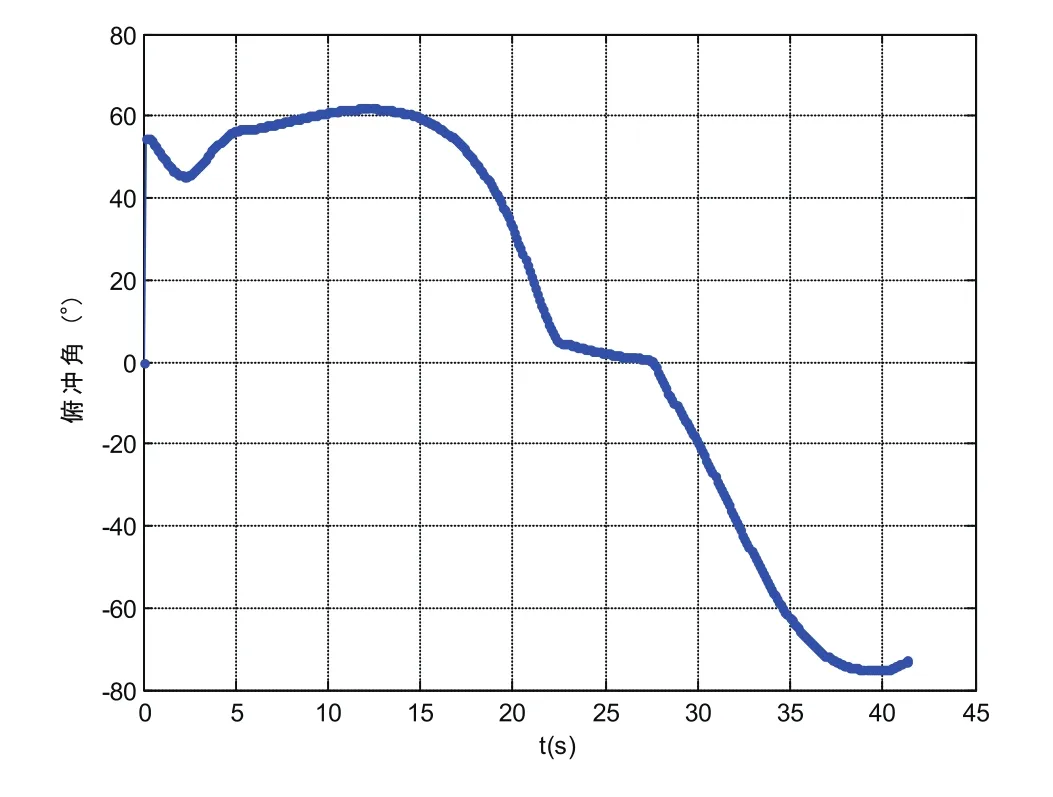
图1 导弹飞行俯冲角
4 结束语
本论文对导弹攻击干扰目标的需求进行分析,提出了一种类似弹道导弹的高抛弹道,俯冲攻击干扰目标的方案,并进行了数字仿真,得出了相应的结论。
首先,针对干扰目标干扰区域特性,依据角姿态控制指令思路,完成角姿态控制指令设计;其次,为了实现导弹末制导段俯冲攻击干扰目标,设计了高抛弹道指令,保证导弹能飞行至期望的高度;再次,为了提高导弹飞行高度,除了完成高抛弹道指令设计外,针对修正比例导引,通过修改有效导航比,完成各空域段地面修正比例导引有效导航比设计;之后,依据角姿态控制指令,针对不同的导弹姿态角,完成角姿态控制指令接入时间和结束时间及指令交班过渡设计;最后,依据以上设计结果,完成数字仿真结果分析,通过分析可得,末制导段至弹目遭遇时刻,导弹的俯冲角能实现大于45°,规避了目标的干扰区域,实现对干扰目标的俯冲攻击。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
火力与指挥控制(2019年6期)2019-07-20
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年6期)2017-11-23
无线互联科技(2017年17期)2017-09-18
软件导刊(2017年1期)2017-03-06