基于稳态视觉诱发电位的脑电控制上肢康复机器人
2021-07-19 09:58胡瑢华邵杭峰郭福民
科学技术与工程 2021年17期
熊 特,胡瑢华,邵杭峰,宋 岩,郭福民
(南昌大学机电工程学院,南昌 330031)
脑机接口(brain-computer interface, BCI)可以看成一种大脑与外部设备之间的协作,它使得神经元中发出的电信号可以直接传送给外部设备,例如计算机或机械臂[1-2]。现如今脑卒中导致的肢体偏瘫问题愈来愈严重,而偏瘫患者的肢体恢复往往需要数位专业的康复理疗师来辅助患者进行康复训练,康复理疗师的人员缺口巨大。因此通过脑机接口技术来控制康复机器人具有重大的研究价值,它不仅允许患者可以独立自主地进行康复训练,还能够在一定程度上提高患者康复治疗地积极性[3]。
李方博等[4]提出了一种双脑协作脑机接口的设计方案,可用于协同控制多维度目标、提高BCI系统信息传输速率,为脑机接口发展提供了新思路。唐智川等[5]提出一种基于单次运动想象的脑电信号分类方法,在实时控制中达到了87.12%±2.03%的成功率。Chen等[6]提出一种基于稳态视觉诱发电位(steady-state visual evoked potential,SSVEP)的7自由度机械臂BCI控制系统,允许用户直接控制机器人手臂,平均精度为92.78%。华南理工大学脑机接口与脑信息处理中心研制的脑机混合接口:在轮椅机械臂系统控制中的应用,得到了良好的控制精度,展现出了BCI控制系统应用于复杂日常任务的潜力[7]。李明爱[8]团队研制了采用运动想象控制的上肢运动康复系统,完成手臂伸/屈动作,该系统的平均识别率为76.75%,固定时间窗为3~5 s。翟文文[9]提出一种基于SSVEP与Alpha波混合的BCI上肢康复训练机器人系统,具有较高的分类准确率和实时控制效果。天津理工大学复杂系统控制与应用重点实验室设计了一种基于脑电控制的移动爬墙清洁机器人智能遥操作系统[10],具有良好的工作效率、安全性以及鲁棒性。
尽管随着基于脑机接口的康复机器人研究不断发展,涌现出了愈来愈多的研究成果,但也同样还面临着许多挑战,如多目标分类的分析时间长、识别准确率仍有待提高。
基于此,现设计一种基于SSVEP控制的上肢康复机器人,目的在于辅助上肢偏瘫患者独立自主进行康复训练运动,并且在实时控制康复运动开始和停止时,仅依靠患者的视觉注意即可完成康复训练过程中所有动作。
1 研究方案
1.1 实验设备
完整实验流程如图1所示,主要设备组成包括:奥地利G.Tec公司生产的80通道系统主机放大器、G.Recorder生物信号记录软件,G.SCARABEO 64通道电极帽,导联位置符合10-20国际标准导联系统,显示视觉刺激界面的计算机,进行信号存储和处理的计算机,蓝牙通信模块和四自由度上肢康复机器人。

图1 基于SSVEP的上肢康复机器人控制流程
上肢康复机器人实物图如图2所示。上肢康复机器人主体部分选用材料为合成塑料聚甲醛树脂(polyoxymethylene,POM)和聚乳酸(polylactice acid,PLA),选用合成塑料既保证了机构强度和硬度,也减轻机构的质量。主体部分通过背部支架安装在一个可移动轮椅上,通过轮椅来实现机器人的移动。上肢康复机器人由伺服电机驱动关节运动,辅助患者完成康复训练动作,设计的康复训练动作为肩关节外展内收、肩关节屈伸、肘关节屈伸和腕关节屈伸4个自由度和1个停止,每个自由度的动作都是周期性重复。另外,考虑到不同患者的上身身高可不同,因此在轮椅的背部支架上还留有不同高度的小孔,用于调整机器人的高度。

图2 四自由度上肢康复机器人
1.2 视觉刺激器设计
基于视觉刺激的SSVEP脑电信号主要特征为当眼睛注视到4~60 Hz的视觉刺激时,在大脑的枕叶区会产生与所注视的刺激相同频率或倍频的脑电信号,该响应信号可以在大脑皮层被检测出。为了保证连续稳定的SSVEP信号出现,现阶段主要有3种主流的刺激显示装置,分别为发光二极管(LED)、阴极射线管(CRT)、液晶显示器(LCD)。
设计的刺激分类为5种,其中4种对应4个康复训练动作,第五种对应停止动作命令。选择了分辨率为1 920×1 080的LCD液晶显示屏作为视觉刺激器。屏幕刷新频率为60 Hz,为保证刺激频率的准确性以及避免SSVEP信号倍频成分之间的干扰[11],设计的5个刺激频率为6.67、8.57、10、12、15 Hz,刺激频率均为60 Hz的整数分之一,分别对应5个控制指令。刺激界面由Pscyhtoolbox-3心理物理学工具箱在MATLAB软件上编写完成,该工具箱可以精确控制视觉刺激频率,设计的刺激界面如图3所示。刺激显示器长46 cm、宽26 cm,正方形刺激块边长4 cm,中间刺激矩形居中布置,与左右刺激矩形间隔16 cm、与上下间隔6 cm,四周刺激矩形与显示器边缘间隔1 cm。

图3 视觉刺激器
2 信号采集与处理
2.1 信号采集
实验选择了5名年龄在22~24岁、均无SSVEP经验的男性为受试者,在除相关实验设备外没有其他大型用电设备的房间中进行。基于1.2节设计的视觉刺激器下采集SSVEP脑电信号。受试端坐于舒适的凳子上正视前方,眼睛与LCD显示屏水平距离保持为60 cm。
闪烁刺激的一个完整的周期时长为5 s,如图4所示。闪烁过程中目标刺激块首先闪烁4 s,后暂停在如图3界面1 s。实验过程每一组实验中要求受试者从最上方6.67 Hz开始依次顺时针分别注视每个刺激块10次,每次注视4 s休息1 s,并告知受试者在闪烁刺激时尽量避免眨眼、眼动或是身动等其他行为。每个受试者进行两组实验,两组实验之间休息5 min。

图4 实验范式循环流程
实验过程中选择采集P3、Pz、P4、PO3、POz、PO4、PO7、O1、Oz、O2、PO8共11个导联通道的脑电信号,并以63通道作为参考信号放置于左/右耳垂处,采样频率为256 Hz,脑电信号采集的某时刻场景如图5所示。实验过程中保证各通道与头皮之间的阻抗在3 kΩ及以下,并通过设置Combine Trigger联合触发器定义好并口传输协议,接收实验过程中生成刺激电脑端口发出的Trigger标志位信号,保证脑电信号产生与频闪刺激开始的精确同步。

图5 在线控制机器人动作
2.2 信号处理
基于SSVEP稳态视觉诱发电位的脑电信号处理常用的算法有快速傅里叶变换(FFT)、典型性相关分析(CCA)、多导联同步指数(MSI)、最小能量结合(MEC)[12-14]。Zhang等在研究中发现,在短时窗样本数据长度较小的情况下,MSI算法相比与CCA、MEC等算法能够得到更高的分类准确率[13]。选择MSI算法作为频率识别的分类算法,SSVEP信号处理流程图如图6所示。

图6 SSVEP信号处理流程
2.2.1 信号预处理
对采集到的信号进行预处理,分别设计了50 Hz去工频陷波滤波器以及4~50 Hz的切比雪夫带通滤波器,使用MATLAB软件完成信号的滤波处理去除工频、高频干扰等噪声。
2.2.2 基于MSI的频率识别算法
MSI算法的主要目的是通过运用S-估计算法,来得出多个通道脑电EEG信号和参考信号之间的同步指数,算法的频率识别过程如下。
脑电信号是一个大小为N×M的矩阵X,构造的参考信号是一组大小为2Nh×M的矩阵Y。N为脑电信号的导联通道数,M为信号样本数即样本长度,Nh为构造的参考信号里包含的正余弦成分的谐波数。计算X与Y之间的相关矩阵为
(1)
(2)
(3)
(4)
(5)
有研究学者发现,C中存在的自相关矩阵会对X与Y之间的同步指数计算结果造成影响,因此进一步对C进行如下公式变换以去除该影响因素。
(6)
经过上述系列变换后的相关矩阵R为
R=UCUT=
(7)
式(7)中:IN×N为维度为N的单位矩阵;I2Nh×2Nh为维度为2Nh的单位矩阵。设Φ1,Φ2,…,Φi为R的特征值,标准化处理为
(8)
式(8)中:P=N+ 2Nh,tr(R)为矩阵R的迹。
信号X与参考信号Y之间的同步指数计算公式为
(9)
基于MSI的多导联频率识别算法在运算过程中,需要依据所设计的视觉刺激频率构造出相应的参考信号Y,假设有k个刺激频率,则构造的参考信号数学表达式[14]为
(10)
式(10)中:Nh、fk、FS分别为谐波数、刺激频率和采样频率。
构造参考信号Y之后,利用式(1)和式(9)即可计算得到每一个EEG脑电信号与所有参考信号之间的同步指数S1,S2,…,SK。其中最大同步指数Smax所表示的参考信号的频率即为MSI算法识别出来的受试注视的闪烁频率。
3 实验与结果分析
3.1 实验流程
对上肢康复机器人进行训练动作调试,通过上位机向机器人发出不同的控制指令,确保机器人能够在接收指令后正确完成相应的康复训练动作。
首先对采集到的SSVEP脑电信号做分类识别处理,并转换成各频闪相对应的控制指令,然后通过蓝牙通信将指令发送至上肢康复机器人的控制器,进而控制机器人完成相应的康复训练动作。记录每一次的频闪分类识别结果以及预期的康复训练动作与实际动作是否一致。
3.2 结果分析
信号分析的过程中为了保证所取SSVEP信号的稳定性,选择从刺激开始后0.2 s作为时间窗的起始取值。首先对5名受试者两组block共120次刺激,0.5~2.5 s每隔0.5 s取一次时间窗长度进行分类识别,所得结果如图7所示。
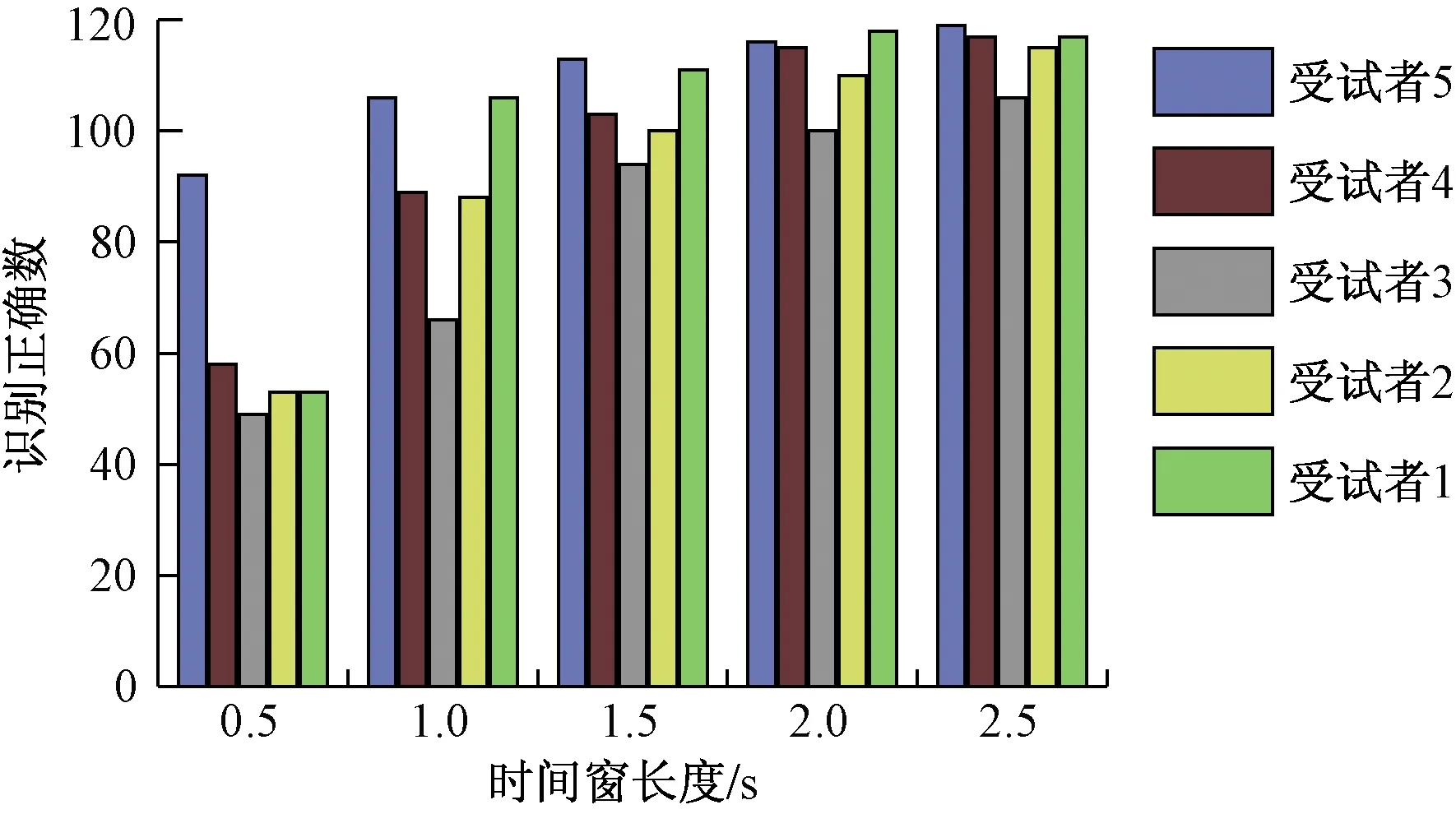
图7 5名受试者的实验结果
根据识别正确数随时间窗长度增加的变化趋势可得,时间窗大于等于2 s后,5名受试者的识别正确数变化均趋于平稳。其中受试者3未按要求集中精神情况,但结果也表现尚可。因此实验控制过程中,以2 s时间窗长度的信号作为分类样本,机器人实际与预期动作完成情况如表1所示。
信息传输速率(ITR)常常用于作为评估脑机接口系统的传输性能指标,计算公式[15]为
(11)
式(11)中:T为采样开始至机器人执行完一次动作的总耗时;Q为刺激目标个数;P为识别正确率;ITR单位为bits/min。实验的平均ITR和平均耗时结果如表2所示。
由表1、表2可知,5名受试者的平均正确率为93.17%,信息传输速率为23.11 bit/min,平均耗时为4.74 s。受试者5表现最好,在2 s的时间窗长度控制正确率达到98.33%;实验结果验证了基于SSVEP信号控制的上肢康复机器人的可行性和有效性。

表1 机器人动作正确率
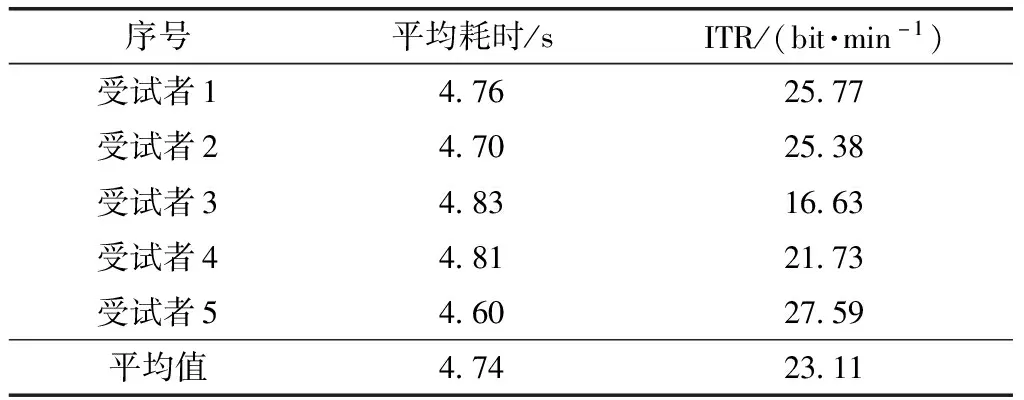
表2 平均耗时与ITR结果
4 结论
基于SSVEP脑电信号控制的上肢康复机器人,允许患者独立自主地进行康复训练运动,2 s时间窗长度下的分类识别情况下,控制动作正确率高达98.33%,达到了预期的研究目标,在控制上肢康复机器人辅助治疗的方面具有良好的应用前景。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中国典型病例大全(2022年11期)2022-05-13
现代仪器与医疗(2022年1期)2022-04-19
中国听力语言康复科学杂志(2021年6期)2021-12-21
计算机仿真(2021年11期)2021-12-10
科学与生活(2021年11期)2021-11-10
现代仪器与医疗(2021年1期)2021-06-09
中华养生保健(2021年18期)2021-02-13
新传奇(2019年40期)2019-11-01
科技传播(2019年24期)2019-06-15