S波段船载测波雷达接收机设计及实现
2021-07-19 09:58魏鋆宇陈泽宗吴思奇范林刚
科学技术与工程 2021年17期
魏鋆宇,陈泽宗*,赵 晨,吴思奇,范林刚
(1.武汉大学电子信息学院,武汉 430072;2.北京无线电测量研究所,北京 100854)
在小型船载雷达方面,古野、安利、光电等日本公司在国外众多生产厂家中处于领先地位,美国的雷神公司也是全球主要船载雷达产品的制造商之一[1]。由于中国在船载雷达系统研发方面起步较晚,船载雷达产品与国外在技术和实力上有不小的差距。随着雷达技术的不断发展进步,雷达在各个领域都起着不可或缺的作用[1]。为了改善微波雷达在海洋遥感领域的表现,武汉大学无线电海洋遥感实验室开发了一款S波段船载多普勒测波雷达[2]。一个雷达系统的正常工作,要求雷达内部各个部件如发射机、接收机、天线和频率合成等部分都能协调工作,又由于电磁波的传播速度快、时间短等特点,对于雷达系统中各部分模块的设计都要求极高。
而目前大多数的雷达接收机基本上都是由放大器、滤波器、混频器等元器件将模拟输入的射频信号放大、滤波并进行若干次频率搬移或变换,再通过模数转换(analog to digital converter,ADC)采样成数字信号,送入计算机做进一步处理。因此可根据ADC采样处的信号频率、接收机的变频次数等将接收机结构划分为基带采样、中频采样、射频直接采样三大类结构,此外根据ADC采样频率和信号带宽的关系又分为带通采样和低通采样两种。但由于雷达系统频段和工作模式的不同,接收机中经常发生信号串扰和时序混乱等情况,导致雷达数据失效和实验失败。
针对上述提到的雷达接收机所存在的问题,现将从接收机的模拟部分和数字部分分别进行分析设计。其中,将接收机的模拟部分和数字部分分置为两个模块,减少模数电路之间的干扰。在模拟部分提出一种需进行两次混频的超外差式结构的射频前端;在数字部分提出一种基于SYSBIOS系统的程序设计,组成一个完整的S波段船载测波雷达接收机模块,实现对信号的精准高效处理和对时序的严格控制。最终,在性能测试中验证该设计的合理性和实用性。
1 雷达系统简介
武汉大学无线电海洋遥感实验室所设计的S波段船载测波雷达系统结构图如图1所示。其中,作为信号处理机的前端,接收机是整个雷达系统中很重要的一个组成部分,它的性能指标直接影响整个雷达系统的工作性能[3]。该雷达接收机设计既需要在模拟电路中对射频回波信号进行两次下混频得到中频回波信号,又要求实现对数字电路中时序信号的精准控制和信号处理等复杂操作,可能使得雷达接收机由于电路模块较多引入噪声、杂散等干扰信号,又或是由于数字信号处理(digital signal processor,DSP)程序设计不佳导致时序混乱等问题,无法获取准确有用的雷达数据参数。因此,雷达接收机应具有良好的电路抗干扰特性和实时响应能力,以保证回波信号采集的相干性[4]。

图1 S波段船载测波雷达系统结构
2 雷达接收机模拟部分
在此S波段船载测波雷达接收机结构中,由于S波段船载测波雷达是基于线性调频中断连续波(frequency modulated interrupted continuous wave,FMICW)原理设计的,发射和接收的射频信号频率范围为2.75~2.95 GHz,而在射频信号上直接进行线性调频是比较困难的,所以需要将收/发天线所接收到的射频回波信号进行两次下混频,同时在第二次下混频时进行线性调频,以此得到频率较低的中频回波信号。
迄今为止,雷达接收机使用的最为广泛,也最为大家接收的是超外差式接收机[5]。根据以上原理分析,船载测波雷达将采用的接收机模拟前端为超外差式结构。超外差式接收机也被认为是目前最可靠的接收机结构。通过选择合适的中频信号频率,高品质的滤波器以及合适的增益分配,后续对中频回波信号进行数字化处理也显得较为便捷,同时使得接收机能实现较高的灵敏度、良好的选择性以及动态范围。
其超外差式系统结构如图2所示。基本流程为:收/发天线接收到的射频信号(2.75~2.95 GHz),首先经过射频预选滤波器进行滤波,其中射频信号设计了门控脉冲TP,控制接收通道的打开或关闭,然后经过低噪声放大器放大以后分别与两个本振信号进行下混频,而两个本振信号在频率合成模块中也均设计了门控脉冲TP、TB,分别控制发射通道和接收通道的打开或关闭,最后得到的中频回波信号经过声表滤波器进行带通滤波后输出固定中频41.5 MHz信号。

图2 超外差式系统结构图
3 雷达接收机数字部分
3.1 接收机数字部分结构
该雷达接收机数字部分的系统框图如图3所示,其中主要包括了单端转差分、ADC采样电路、数字下边频电路和DSP核心板及其电源等外围电路。当接收机模拟部分处理后得到的中频回波信号到达数字部分时,先经过差分转单端变换器ADT1-1WT+将差分信号变换为单端信号,再将单端信号送至AD采样电路进行带通采样,然后对模数变换后的数字信号进行数字下变频,得到正交混频的I/Q信号,最后再把I/Q信号送至DSP核心板中通过程序设计进行信号处理。
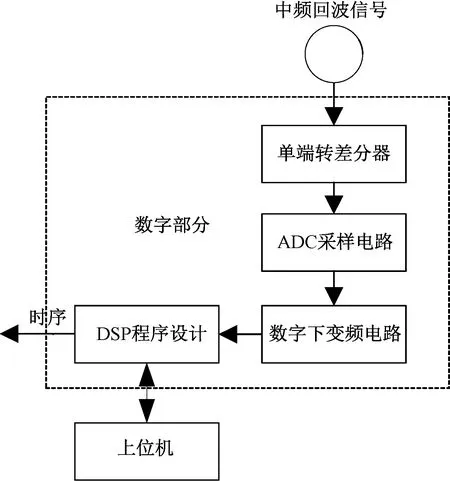
图3 数字部分系统框图
3.2 匹配滤波原理
根据经典的雷达检测理论,在一定的虚警概率下,要提高目标的检测概率,就要设法提高目标回波的信噪比。而在线性滤波器中匹配滤波器理论上可以使得回波信号的信噪比达到最大,因此匹配滤波器也是接收机设计的理论依据。
在多普勒雷达应用中,根据匹配滤波理论,常采用一组低通滤波器组和快速傅里叶变换(fast Fourier transform,FFT)来等效匹配滤波器[6]。为了使接收机工作在最佳状态,低通滤波器的带宽应设计得尽量与回波信号的谱线宽度相匹配,从而滤出基带信号[7]。FFT的实质作用是用数学方法计算离散信号的频谱,每个固定频率分量的输出就相当于中心频率在此固定频率上的窄带滤波器的输出[8]。
对于海洋探测,由于海洋表面各态历经平稳随机过程的稳定时间有近30 min[9],在此时间以内可近似认为探测的海洋数据是平稳的,等效匹配滤波器的原理实现框图如图4所示。接收机数字部分和程序设计将围绕此原理进行,原理的证明较为烦琐,请参阅文献[6]。图4中将Sr(t)和St(t)混频为去线性调制处理,获得单一的频率信号。经过低通滤波器是为了去除杂波,仅保留包含目标信息的基带信号。

Sr(t)为回波信号;St(t)为发射信号
3.3 带通采样原理
S波段船载测波雷达发射信号的工作频率范围为2.75~2.95 GHz,经过接收机模拟前端的两次下混频后,得到的中频回波信号为41.5 MHz,若接收机直接对中频信号进行AD采样,根据奈奎斯特采样定理要求,即
fs≥2f0+B
(1)
式(1)中:fs为奈奎斯特采样频率;f0为信号的基频;B为信号的带宽。所以相对于中频信号41.5 MHz来说,通过计算,采样芯片需要达到85 MHz以上的采样频率,对采样芯片要求较高,但采用带通采样的方式对中频信号进行采样时,采样率[10]需满足:
(2f0+B)/N≤fs≤(2f0-B)/(N-1)
(2)
式(2)中:N为能够使不等式成立的正整数。所以可根据式(2)进行计算,采用设计相对容易,成本相比较低的AD9235-40芯片。
3.4 系统时序
以125 kHz采样率下系统的时序图为例,时序关系如图5所示,RF为发射的线性调频信号,单周期扫频时长为4 096 μs,间歇时长为16 μs,则扫频周期为4 112 μs,扫频范围为2.75~2.95 GHz。TP为发射控制脉冲,高电平和低电平时长均为8 μs,周期为16 μs。

图5 系统时序图
因此,在一个扫频周期内,将有256个TP脉冲去控制RF信号是否通过天线被发射出去,即形成调频中断连续波。TB是接收控制信号,即压地波,其周期与TP一样,高电平时长是以TP高电平为基础并在其前后加上一定的延时形成。延时是由于当雷达共用收发天线时,避免在系统进行收发切换时,产生信号直通,即发射的大功率信号直接通到接收机,导致接收机损坏;同时,也可以调整雷达离盲区的范围,避免近距离的强回波信号对系统产生的干扰。
其中Echo为回波信号,是发射信号经过目标反射返回至雷达天线的信号。IF为去线性调频后的单一回波信号,即线性调频信号减去回波信号。SS为子帧同步信号,也是接收的采样触发信号,高电平时长1 μs,周期与扫频周期一致,其下降沿为开始接收AD采样信号的标志。其中fs为ADC的采样信号,频率为40 MHz。
3.5 程序设计
根据上述分析与介绍,现对接收机程序设计的要求进行简要的概括如下。
(1)实时性要求,保证回波信号采集的相干性。
(2)数据存储延时较小,以降低FFT算法的计算时间和数据上传时间。
(3)稳定的网络通信,确保数据的有效传输。
(4)多任务综合管理,统一调度。
围绕以上4个要求对DSP程序进行设计。SYSBIOS程序设计流程如图6所示。

图6 程序设计流程图
程序设计基于SYSBIOS系统和PRUSS模块设计实现。利用SYSBIOS系统强大的综合管理能力,对各子函数和任务进行统一调度和管理。同时,在SYSBIOS下加如NDK套件可以极大地简化对以太网的程序开发。但由于SYSBIOS对硬件中断具有响应延时不定的情况,无法满足系统开发需求,所以,利用PRUSS模块增强DSP的实时响应能力。最后,考虑到数据的存储延时,可能导致系统的实时性能下降,综合分析,选用128 Kb的共享内存(Shared RAM)作为数据存储器。
4 性能测试
4.1 灵敏度测试
灵敏度定义为可以接收到的并仍能正常工作的最低信号强度,通常用最小可检测信号的功率表示[11]。按照接收机设计指标输入两个本振信号与射频信号,将数控衰减器衰减设置为0 dB。用频谱仪测试输出信号的幅度。调整频谱仪的设置使得基底噪声尽可能低。缓慢调整射频信号的输入幅度,当输出幅度比噪声基底高12 dB时(即系统要求的最低信噪比),认为此时的输入信号的幅度为接收机的灵敏度。选取雷达接收机接收射频信号的频率范围(2.75~2.95 GHz)进行灵敏度测试,测试结果如表1所示。

表1 灵敏度测试结果
4.2 1 dB压缩点测试
增益是输出和输入功率的比值,这个比值是在线性范围内的一个常数,由于模拟前端中的两个混频器非线性的存在,如果输入的信号增大会使得这个值发生变化[12]。然后继续调大射频信号的幅度,直到输出信号的增加幅度比输入信号的增加幅度小1 dB时,认为此时的输入信号幅度达到了1 dB压缩点,把此值当作接收机线性动态范围的上限[13]。选取雷达接收机接收射频信号的频率范围(2.75~2.95 GHz)进行1 dB压缩点测试,测试结果如表2所示。

表2 1 dB压缩点测试结果
4.3 线性动态范围测试
动态范围式指接收机正常工作时,输入端能够处理的信号变化范围。其最小值一般为接收机能够接收到的最小功率,最大值则由输出端所允许的最大失真决定[14]。因此,动态范围又分为线性动态范围和无杂散动态范围。
此测试测量接收机的线性动态范围,其为器件输出功率增益下降1 dB时,器件输入信号功率与最小可分辨信号功率之比[15],公式为
LDR=P1 dB-Smin
(3)
将选取雷达接收机接收射频信号的频率范围(2.75~2.95 GHz)进行线性动态范围测试,测试结果如表3所示。

表3 线性动态范围测试结果
4.4 闭环测试
将完整接收机设计完成后,接入S波段船载测波雷达系统,进行闭环测试,并在上位机中设置第17个距离元处有固定回波信号。故将采集到的数据进行第一次FFT运算,FFT运算结果如图7(a)所示,其对应于第17号距离元的信号信息清晰可见,其余部分也无杂散信号,由此可见雷达FT1数据较好。

图7 两次FFT运算结果图
若一个采样周期内采集到的所有距离元数据,再做第二次FFT变换,可得到一张距离多普勒谱,结果如图7(b)所示。由图7(b)可直观看出,在第17个距离元处(白色椭圆圈出)有一静止目标的回波信号,且整张距离多普勒谱非常清晰干净,信噪比大约70 dBc,无噪声、杂散等干扰信号存在。
5 结论
分别从模拟部分、数字部分进行原理叙述和方案分析,设计并制作了S波段船载测波雷达接收机。模拟部分采用超外差式结构对射频回波信号分别进行两次下变频混频后得到高信噪比的中频回波信号,此方案保证了雷达接收机的高灵敏度,1 dB压缩点也远远满足指标要求,从线性动态范围的角度来看,实测结果也相对合理。数字部分在AD采样,匹配滤波、程序处理的设计上也实现了对数字信号的高效处理和时序信号的精准控制。由整机闭环测试的结果也可以看出,所有指标要求均满足该雷达系统。研究结果为S波段船载测波雷达海试实验提供了保障。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
导航定位学报(2022年1期)2022-02-17
装备环境工程(2020年3期)2020-04-03
中国电气工程学报(2019年18期)2019-10-21
卷宗(2018年14期)2018-06-29
中学生数理化(高中版.高一使用)(2018年2期)2018-04-04
小资CHIC!ELEGANCE(2018年8期)2018-04-03