
异步电动机软启动控制系统的功率因数研究
2021-07-16 10:42:58汪皓钰
江西电力 2021年6期
汪皓钰
(国家电网公司华中分部 湖北 武汉 430077)
0 引言
目前,三相异步电动机除本身对电磁力有较大冲击以外,其自身运行对电网电压波动有着一定的影响,从而导致电力设备无法正常运行[1]。因此,为了进一步将这些问题解决,则需要设计好异步电动机软启动控制装置。目前,在异步电动机软启动控制系统中,若功率因数低,则会导到供电设备无法有效输出,并且也会导致供电设备以及线路损耗增加[2]。由此可见,在三相异步电动机软启动过程中,有效选用功率因数补偿装置,是保证用电安全,提高供电效率的关键所在[3]。因此,文中研究提出异步电动机软启动控制系统的功率因数提高,针对三相异步电动机软启动系统补偿无功功率的方案,以此来提高功率因数。
1 异步电动机软启动系统补偿无功功率的方案
1.1 晶管体的功率因数补偿装置概述
异步电动机软启动控制系统中,晶管用于软启动较为广泛,其价格相较于同类产品较低,并且技术成熟,作为晶管体的功率因数补偿装置,能够较好的控制电流,调节电压,从而保证用电安全。在异步电动机软启动控制系统中,功率因数的设置十分重要。功率因数的不同,异步电动机软启动的控制效率也会发生变化[4]。
1.2 异步电动机控制器的实现思想
异步电动机控制器的实现思想主要由两个方面组成,第一,电动机启动时,需要产生足够的转矩,从而带动负载能够快速实现正常转速;第二,电机启动电流不可过大,需要考虑功率因数的反馈量,从而使电流得到较好的控制,不会因过大,导致供电失去稳定性。若供电变压器的容量处于较小的状态下,则此时启动电流过大,没有得到较好控制,那么会造成线路压降,从而影响接在同一电网上的其它电气设备的正常运行。故功率因数的反馈量确定以及转矩的控制,均对异步电动机软启动控制器的实现有着重要的影响。因此,文中研究需要重点考虑软启动过程中功功率因数的提高,从而实现异频电动机输出电流的有效控制。
1.3 MATLAB6.5软件介绍
根据上述异频电动机软启动控制系统相关功率因数提升的分析,从而确定最理相的功率因数据输出模块,利用MATLAB6.5中的Simulink库SimPower-Systems库,可以建立异步电动机软启动控制系统的功率因数提高的仿真模型[5]。该软件是目前同类软件仿真中误差较小,并且成本较低、操作较为简单的仿真软件[6]。因此,文中研究选取MATLAB6.5软件作为异步电动机软启动控制系统的功率因数提高的仿真设计软件使用。
2 控制系统的仿真模型
2.1 电机及检测模块
本系统仿真选用的是一型非标准的鼠笼式异步电动机,选择这种电机主要考虑,其相电压可以长期工作在160 V以下,选择的仿真模块是由simulink提供的,Asynchronous Machine SI Units模块[7]。具体参数如下:
①PKwn=7.5 kW;②VVn=380 V;③f=50 Hz;④=0.418ΩsR;⑤LHs31210−=×;⑥=0.778Ω/rR;⑦LHr/31210−=×;⑧2J=0.0798 kq·m;⑨p=2。异步电动机各参数测量采用Machine Measurement Demux模块,所需要测量的参数是sabci−、nω、eT[8]。
2.2 软启动模块
文中模拟中,为了更好的获得较高的功率因数提高目标,从而获得良好的启动性能,需要将启动的频率范围在标准的初始要求内执行操作。因此,这一范围的设定需要对电动机进行条件约束,具体内容如下:
第一,保证转矩足够,设定额度转矩为120%。
第二,启动电流控制在额定电流的2.5倍以内,以此来保证电流处于较小的启动状态下。
2.3 软启动电压与频率
2.3.1 软启动电压与频率的控制
软启动电压与频率的控制十分重要,这是保证功率因数能否提升的关键所在。通常应用变频调速,以此来实现功率因数的提高。此时,需要保证电动机容量得到充足的利用,需要保证电动机启动时最大转矩不会发生变化,则需要对定子端电压与频率成比例的调节。如图1所示。
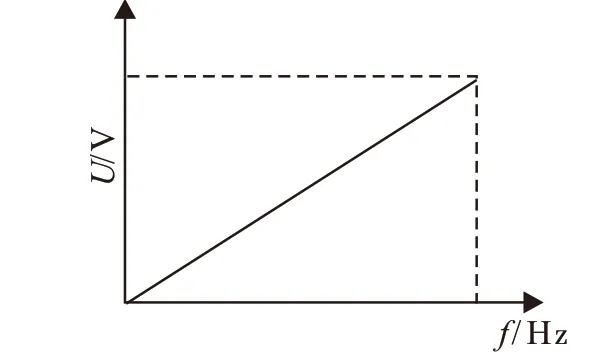
图1 磁通恒定时电压的频率关系示意图
U作为电压,f则表示频率,磁通恒定时,成比例的调节定子端电压与频率,同时降低电压,从而保证转矩在最大状态,而功率因数也由此得到最大程度的提高,进而保证软启动对电流与电压的控制。
2.3.2 最佳启动频率范围
最佳启动频率范围需要满足启动转矩要求,并且需要满足晶闸管调压电路对启动电流的要求,同时还需要满足启动要求的启动频率范围,从而能够认定为最佳的启动频率范围。因此,在实际仿真过程中,需要着重确定前述三项启动要求的频率是否满足,三项均满足时,方可认定为最佳启动频率范围,从而为功率因数的提高,提供重要的基础条件。
2.3.3 启动电压的确定
依据定子端电压与频率成反比例的调节要求,文中研究采两段频率启动方式,第一段启动频率10 Hz,定子相电压50 V,第二段频率设定为25 Hz,定子相电压110 V。
2.4 功率因数检测模块
文中研究结合上述对异步电动机软启动控制中功率因数提升的需求分析,确定功率因数检测模块。文中研究主要以单相作为模拟仿真检测对象,模拟功率因数子系统的仿真,成功通过了测试,功率因数值由Display模块显示出来,如图2所示。
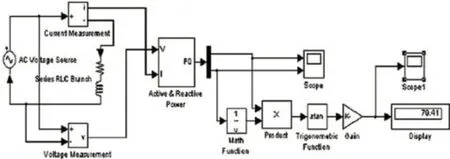
图2 功率因数检测仿真图
在图2可见,用单相交流电对一负载供电,由Active&Reactive power模块分别测得负载的有功功率、无功功率,无功功率取倒数后与有功功率做乘法,即得到了P/Q,取反正切后即可得到功率因数角。
文献[9]与文献[10]明确指出,现有异步电动机的软启动开关均为0.3~0.4,而文中研究的异步电动机功率因素需要大于0.6以上,则可视为功率因数提升。具体通过模糊控制器模块仿真可以得到。
2.5 模糊控制器模块
文中研究根据上述对异步电动机软启动控制功率因数提高的设计,最终确定模糊控制器的仿真,从而确定功率因数提高的具体效果。模糊控制器的仿真是通过一双输入单输出的结构,输入输出变量的模糊论域均为[0,1],分为7个档{NB,NM,NS,ZO,PS,PM,PB}={“负大”、“负中”、“负小”、“零”、“正小”、“正中”、“正大”}。具体仿真结果如图3所示。

图3 功率因数隶属函数仿真图
由图3可见,功率因数隶属函数仿真图界面中,对相应参数进行设置,输入变量In1为电压系数(Voltage),输入变量In2为功率因数(Power factor),输出变量Out为触发角的大小(modulus),它们隶属函数均为高斯二型。以Voltage变量为例给出了其隶属函数图。进一步得到图4模糊控制器模块的仿真模糊规则与图5曲面观测情况。
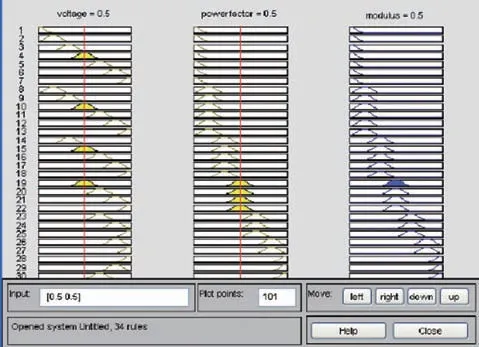
图4 模糊控制规则图

图5 曲面观测器
模糊控制图,根据大量的电机工作曲线结合第二章的分析,总结出如下11条模糊规则仿真结果。
1)如果电压最低,功率因数最低,则模量最高。
2)如果电压最低,功率因数较低,则模量最高。
3)如果电压最低,功率因数低,则模量最高。
4)如果电压最低,功率因数平均,则模量最高。
5)如果电压最低,功率因数高,则模量最高。
6)如果电压最低,功率因数较高,则模量最高。
7)如果电压最低,功率因数最高,则模量最高。
8)如果电压较低,功率因数较低,则模量较高。
9)如果电压较低,功率因数最低,则模量较高。
10)如果电压较低,功率因数平均,则模量较高。
11)如果电压较低,功率因数模量较高。
3 仿真结果及结论
3.1 仿真结果
由于异步电动机软启动是带负载初始运行,故而在启动时功率因数值处于高较状态,从而导致在0.3 s、0.7 s软启动频率切换时,导致功率因数的数值波动较大,但是这种影响并没有维持较长时间,而是出现后便即刻消失了。与此同时,电动机的转速在启动过程中一直处于上升状态,软启动性能指标达到文中设计方案的要求。具体如图6与图7所示。

图6 功率因数变化曲线
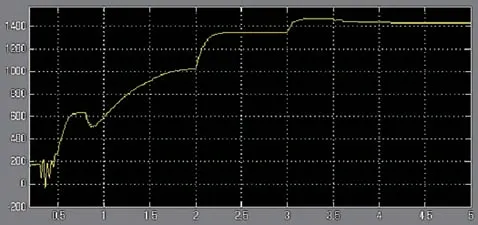
图7 转速变化曲线
由图7可见,在异步电动机的启动过程完成后电动机进入稳态运行,在2 s时突然将负载率调到了40%,在3 s时异步电机突然空载。
3.2 结语
通过文中仿真研究得到,当实施软启动空载时,功率因数值立刻降至0.1左右,经文中研究提出的软启动晶闸管控制器调节,电机立刻提高到0.6以上。而此时,经过估算文中研究可完成节能75%左右,此设计方案下,能够达到节能效果,完全满足功率因数大于0.6的设计要求,并且电动机功率因数仅需0.3-0.4左右,控制器即可发生响应,已经超出本仿真的预期效果。
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
山东交通科技(2020年1期)2020-07-24 08:28:58
山西建筑(2020年11期)2020-06-04 00:09:48
测控技术(2018年9期)2018-11-25 07:44:22
上海公路(2018年4期)2018-03-21 05:57:24
电子制作(2016年1期)2016-11-07 08:43:01
通信电源技术(2016年5期)2016-03-22 01:09:45
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20
