植保无人机药箱防晃性能检测试验台设计与试验*
2021-07-15 01:42:52于金友尚德林兰玉彬范鑫韩鑫
中国农机化学报 2021年6期
于金友,尚德林,兰玉彬, 2,范鑫,韩鑫
(1. 山东理工大学农业工程与食品科学学院,山东淄博,255000;2. 山东省农业航空智能装备工程技术研究中心,山东淄博,255000)
0 引言
伴随植保无人机技术与装备的快速发展,人们对植保无人机药箱防晃/防浪涌性能的要求越来越高[1-3]。植保无人机在作业过程中经常做出起飞、降落、急停、转向、平移、绕点旋转和仿地飞行等动作,此时药箱内的药液在激励的作用下进行剧烈晃动[4-6],无疑会对植保无人机的整机作业性能产生很大影响,包括飞行安全性、轨迹精准性、作业精确性和动力续航性等[7-8]。此外,随着作业过程中药箱充液比的下降,这种晃动会变的愈加剧烈和明显,严重时甚至会造成坠机等事故,大大影响其作业质量、作业效率和飞行安全[9-11]。因此,在植保无人机药箱设计过程中,需要借助专门的药箱晃动性能检测装置,对所研发的植保无人机药箱进行晃动性能评价[12-14]。
近年来,山东农业大学戴世群、郑继周等针对充液箱体晃动现象,以充液系统在外界激励下的力学特性为研究对象,搭建了几种水平激励下的液体晃动干扰力试验台。然而,这类箱体晃动性能试验台仅能在二维空间内施加水平晃动激励,尚不能在三维空间内施加多自由度晃动激励,不能模拟植保无人机在三维、复杂作业工况下的多种药箱姿态,因而亟需研发一种能够在三维工况下模拟植保无人机药箱多种晃动姿态,并进行多传感器数据采集的试验台,以弥补在该领域的空白[15]。
本文以六自由度运动平台为核心,对其进行传感器与是不同形状药箱的适配能力进行改装,然后利用试验台对选取的典型形状药箱进行试验,通过安装在药箱壁的压力传感器和药箱的底部液位传感器得到在两个不同激励刺激下药液对药箱内壁产生的压力及其液位变化,分析其变化规律,从而为植保无人机药箱优化设计提供技术支持。
1 夹持机构设计
夹持机构是植保无人机药箱防晃性能检测试验台的重要组成部分,用来夹持各种类型、大小的被测药箱,以满足试验台可以适配市面上大部分药箱的要求,同时可以减少实验过程中药箱与六自由度运动平台的不协调晃动,提高试验精准度,同时还有效地保证了实验的安全性。首先根据六自由度运动平台上平台的大小和工作连接方式对夹持机构的整体尺寸进行设计,如图1所示。
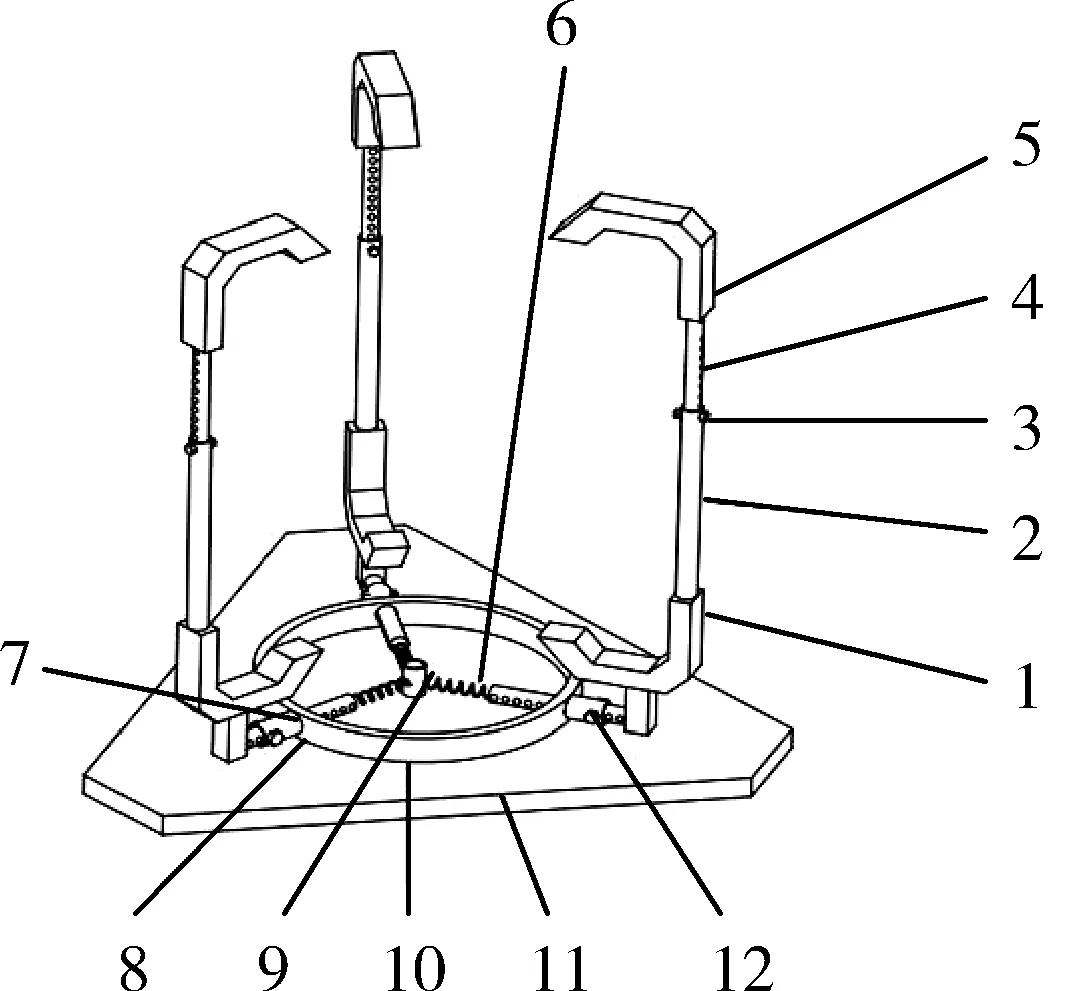
图1 夹持机构三维渲染图
对于尺寸的设计,首先要根据市面上的植保无人机典型药箱的大小来决定夹持机构在水平和竖直方向上可伸缩的范围,对市面上的植保无人机药箱进行统计分析可以发现,几乎所有药箱的三维均在200~500 mm 之间,所以将夹持机构可调节的极限大小设置为200~500 mm。
夹持机构由连接盘、下模夹、上模夹三部分组成,其中连接盘分为底板和连接环,其中连接环为圆环形且固定于底板正中心;底板为2 cm厚,形状为与六自由度运动平台上平台相同的六边形,大小近似,作用是与运动平台上平台相贴合,通过四周的6个紧固夹来固定连接盘,对下方的六自由度运动平台和夹持机构起承上启下的作用,夹持机构通过上下模夹来实现垂直方向上的高度调节,通过连接盘上的弹簧拉杆和下调节销,实现水平方向上的大小调节,以便满足市面上种类复杂的药箱的夹持工作。
2 数据采集组件设计
数据采集组件包括液位传感器、压力传感器组、数据采集卡、上位机,如图2所示。角度传感器固定于测试用植保无人机药箱外壁面上,角度传感器用于采集植保无人机药箱在晃动时其竖直方向中轴线与水平面的倾角;液位传感器处于测试用植保无人机药箱内部的底部,液位传感器用于采集植保无人机药箱内液体的液面位置,一定数量的压力传感器组沿水平圆周方向间隔同等角度固定于测试用植保无人机药箱内壁面上,每个压力传感器组由一定数量的压力传感器沿竖直方向均匀排列而成,压力传感器组用于采集植保无人机药箱内不同液位的液体对其壁面的水压压力;数据采集卡的输入端通过数据线与角度传感器、液位传感器、压力传感器组相连接,数据采集卡的输出端通过数据线与上位机相连接,数据采集卡和上位机用于实时采集、变送和显示所有传感器所采集到的数据信息。

图2 传感器组件示意图

图3 传感器组件实物图
以高为40 cm的药箱为例,充液比0.3时,药液水平面离药箱底部12 cm,传感器1应当放置位置范围在离药箱底部0~12 cm处;秉承传感器安装便宜的原则,传感器最终位置定于离液面三分之一个液位高度,根据以上原则传感器的安装位置h可由式(1)确定。
(1)
式中:H——药箱高度;
φ——药箱充液比。
根据式(1)可计算传感器1、2、3、4的位置分别位于离药箱底部8 cm、13 cm、18 cm、24 cm处。
2.1 压力传感器选型
本试验所使用的压力传感器为XGZP6847型压力变送器(图4),是一款适用于生物医学、汽车电子等领域的压力传感器,其核心部分是一颗利用MEMS技术加工的硅压阻式压力敏感芯片。该压力敏感芯片由一个弹性膜及集成在膜上的4个电阻组成,4个压敏电阻形成了惠斯通电桥结构,当有压力作用在弹性膜上时电桥会产生一个与所加压 力成线性比例关系的电压输出信号。

图4 XGZP6847型压阻式水压力传感器
XGZP型压力敏感元件为采用标准的SOP6和DIP6形式封装的OEM元件,方便用户采用表面贴装或双列直插式进行安装良好的线性、重复性和稳定性,灵敏度高,方便用户采用运放或集成电路针对输出和温漂进行调试和补偿。
对于压力传感器的安装原则是必须保证不同充液比下均可测量到药液对药箱内壁的冲击压力,且由于防水性压力传感器的价格较高,本着节约成本的原则,选择的压力传感器的防水性能较差,无法直接安装在药箱内壁,所以选择在药箱外壁进行钻孔,将传感器的压力接收部分置于药箱内部,同时用防水胶进行固定。安装位置从药箱底部5 cm处开始,沿竖直方向每隔 3 cm 加装一个压力传感器(图5),共加装4个,从底部第一个起,分别命名为传感器1、2、3、4,然后沿水平圆周方向间隔180°以同样方式加载压力传感器对照组,在进行药箱不同充液比试验时,选择不同于液位下位于药液竖直方向中间位置相对的两个压力传感器作为数据采集装置,采集植保无人机药箱内不同液位的液体对其壁面的水压压力。

图5 典型药箱的压力传感器安装示意图
利用LABVIEW程序可以连续采集一段时间内的电压值,该值是经压力变送器模块的放大电路放大后得到的电压值,电压值将直接与传感器受到的液压呈线性关系,如图6所示。

图6 压力输出对应曲线
2.2 液位传感器选型
本试验所使用的液位传感器为AS-136投入式液位变送器,如图7所示。产品采用316L不锈钢隔离膜片的OEM压力传感器作为信号测量元件,并经过计算机自动测试,用激光调阻工艺进行了宽温度范围的零点和灵敏度温度补偿。放大电路位于不锈钢壳体内,将传感器信号转换为标准输出信号,充分发挥了传感器的技术优势,使136系列液位变送器具有优异的性能。它抗干扰、过载和抗冲击能力强、温度漂移小、稳定性高,具有很高的测量精度,是工业自动化领域理想的压力测量仪表。

图7 136系列投入式液位变送器
2.3 数据采集卡选型
此次试验涉及多种传感器,所以需要数据采集卡将压力传感器、液位感器传感、所采集到的电信号转化为具体的压力值、高度,通过上位机中的采集软件显示出来。试验中选用的数据采集卡为24位AD采集卡是一款多功能数据采集卡(图8),四通道差分,最大量程 ±2.5 V,单通道最大采样速度30 Ksps。该采集卡可被用于传感器的压力测量中。

图8 数据采集卡USB DAQ-580i企业版
3 上位机软件部分设计
3.1 上位机数据采集工具
由于在本文试验中需要得到压力和液位的变化曲线,对于采集到的数据不需要太多的后处理,所以在上位机数据采集软件的选择上条件很低,本文选择的是数据采集卡自带的USB DAQ-580i数据采集工具V3,该采集软件提供两种工作模式,分别为高速采集和慢速采集。
高速采集:支持任意单通道,双通道,四通道连续采集,可高速无断点采集 信号,用户可选择合适的采集速度,软件根据所选择的采样率进行采集存储,所有数据点将被存储。因存储速度限制,该软件通过fifo手段进行数据缓存,确保记录的数据和存储的数据保持一致,不丢数据点。
低速采集:支持单通道和四通道低速采集,用户可自行输入延时时间,该时间基于电脑时钟进行延时,如输入1 000,即1 000 ms为间隔时间进行采集。
3.2 采集卡控制指令参数设置
由于需要得到的是一系列压力点组成的压力曲线,所以在测量模式上选择连续测量模式:采集器接收的连续模式指令后,试验人员无需反复发送指令,采集器会根据 设置的参数连续输出数据,同时需发送中断/停止采集指令才能中断采集器输出,操作流程如图9所示。

图9 采集器的读写操作流程
试验台的数据采集组件中包含压力传感器和液位传感器,所以采集卡选择差分连续双通道测量模式,采集卡板卡是基于USB总线进行数据传输,我们利用visual studio c#语言调用USB通信函数对采集器进行读写操作,可直接运行对采集器进行控制读取通道电压,在源代码的基础上,可以进行采样速度、采样时间、量程等参数的设定。
4 试验台整机设计
目前,针对植保无人机飞行作业过程中的药箱内药液晃动试验几乎没有,只能以一些罐体、箱体内的液体晃动试验作为参考,选择测量监控药箱壁面一些固定点处的压力值,以及液体晃动时药箱内液体的实时液位,从而计算出药箱晃动时的晃动频率、晃动力矩、液面平复时间等指标(植保无人机飞行作业时的稳定性与这些指标息息相关),从而对其药箱内液体的晃动进行分析研究。试验台整体结构如图10所示。

图10 试验台整体结构
试验台测试系统软件包括测试软件界面、数据存储功能、性能曲线绘制、测试报表生成及打印功能。试验台采集的数据主要有压力、液位。试验台计算机控制系统主要框图,如图11所示。

图11 试验台控制系统示意图
5 试验验证
5.1 试验工况的选择
在农业航空领域,植保无人机药箱最通用就是矩形药箱,矩形药箱结构规整、制造工艺简单,不管是挂载还是利用卡槽嵌入植保无人机都是极为便宜的,能够有效地降低植保无人机的制造成本,而且对于购买者来说,也可以在一定程度上减少零件更换的成本。
植保无人机在飞行作业过程中,会经常进行起飞、急停、转向、仿地飞行、绕点旋转(果树模式)等飞行姿态,其中当植保无人机出现起飞、急停、转向这三种飞行姿态时,本质上相当于给植保无人机药箱一个定向的加速度激励,而植保无人机在飞行作业时最佳也是最常用的飞行速度为4~8 m/s,取其平均数为6 m/s,同时利用极飞p30的实飞测量,得到植保无人机速度从0 m/s到6 m/s的加速时间为2 s,通过加速度公式
Vt=V0+at
(2)
式(2)可变形
a=(Vt-V0)/t
(3)
式中:V0——植保无人机的初始速度,即0 m/s;
Vt——植保无人机终止速度,即6 m/s;
t——植保无人机的加速时间,即2 s。
通过计算可以得出加速度a=3 m/s2.当使用试验台进行模拟试验时,给植保无人机药箱一个3 m/s2的加速度即可模拟植保无人机在起飞、急停、转向时的药箱工况。
当植保无人机在飞行作业时,药箱内得药箱内的药液会随作业的进行越来越少,药箱内的充液比也会随之降低,贮箱的充液比是影响液体在贮箱内晃动的重要条件之一;为达到实验效果明显的目的,本文试验时药箱充液比选择为70%。
5.2 试验数据分析
5.2.1 水平激励
图12为药箱充液比0.3时矩形药箱在加速度为 3 m/s2时两侧壁受力曲线图与试验时药箱中心点处药液液位高度变化图,通过图12可以看出药箱左侧内壁受压曲线的波峰出现在0.496 s,压力曲线呈波浪状,且大致走向为恢复到药箱初始液深静压;相较于药箱左侧内壁受压情况,药箱右侧内壁受压曲线波动不大,在3 s之后同样呈波浪状,大致走向为上升趋势,同样是逐步恢复到试验前的液深静压状态。

(a) 药箱内壁两侧压力
在给药箱施加激励后,药箱内的药液瞬间涌到药箱左侧,在0.496 s时药箱左侧内壁产生第一个压力峰值,大小为100.3 Pa,然后涌入左侧的药液在惯性力的作用下开始回流,在药箱右侧内壁上出现一个小的压力峰值,随后药箱内药液继续在惯性力的作用下涌入左侧内壁,使得左侧内壁产生第二个压力波峰,如此往复,液体晃动的幅度越来越小,所产生的压强波峰也随之变小,直至两侧内壁上的压力均达到液深的静压。
图13为药箱充液比为0.6%时矩形药箱在加速度为3 m/s2时侧壁受力曲线图与试验时药箱内药液液位高度变化图,可看出药箱左侧内壁受压曲线的波峰出现在0.315 s,1 s之后压力曲线呈波浪状,且大致走向为恢复到药箱初始液深静压;相较于药箱左侧内壁受压情况,药箱右侧内壁受压曲线波动不大,在2 s之后同样呈波浪状,大致走向为上升趋势,同样是逐步恢复到试验前的液深静压状态。

(a) 药箱内壁两侧压力
药箱左侧内壁在施加激励后的0.315 s时压力达到最大峰值为215.3 Pa,同时药箱内液位变化曲线图显示在0.315 s时同样达到最小峰值为9.2 cm,这说明在试验0.315 s时,药箱内的液体晃动程度达到最大,随后压力和液位都开始进入不同程度的平复期,同时结合矩形药箱两侧内壁受压曲线图和矩形药箱中间位置液位曲线图我们可以看出,当试验台给药箱模拟施加激励后,药液在药箱内出现大幅晃动的情况,在0.315 s时液体晃动幅度达到最大,之后药液在惯性力的作用下开始出现往复回流,随着惯性力和摩擦力的存在,晃动幅度逐渐减小,大约在10 s左右药箱内药液恢复到试验前状态。
5.2.2 圆周激励
随着植保无人机的不断发展,作业功能也在不断完善,现在市面上的植保无人机大多可以进行多种作物作种方式的喷施作业,以果树为例,由于果树大多枝叶茂盛,如果只是简单的往复喷施,很容易造成药液只能喷施到果树冠层的现象发生,所以有很多植保无人机具有果树喷施模式,飞行方式即环绕果树旋转,在此模式下,由于离心力的作用,整个植保无人机及其药箱会出现向树轴倾斜的现象,从而导致药箱内药液的剧烈晃动。
由于药箱在外部圆周激励的刺激下,矩形药箱模拟植保无人机做圆周运动时,此时植保无人机大多处于绕点模式下,在此模式下植保无人机在空中进行匀速的绕点圆周运动,药箱内药液会在药箱中呈旋涡状态(旋涡大小与植保无人机绕飞速度有关),实验中药箱内药液对药箱四个内壁的压力大小和分布大致相同,多侧压力的测量意义不大,且出于试验与分析的简便性,对于圆周激励下数据采集均采集一侧药箱内壁的压力曲线。
图14为药箱充液比分别为0.3、0.5、0.7、0.9时矩形药箱在向心加速度为3 m/s2时药箱内壁压力曲线图,同时对比矩形药箱在水平激励下的压力,我们可以发现矩形药箱内壁所受压力的波动幅度要远远小于水平激励下的压力波动幅度,这是由于药液在两种不同激励下在药箱空间做不同的运功,在水平激励下,药液在药箱内是做水平方向上的往复运动,对内壁的压力随运动的幅度变化,而在向心加速度激励下,药箱内药液在药箱空间做圆周运动,药箱内壁压力有两方面原因影响,一是药液做圆周运动是的离心力,二是由于矩形药箱的棱角部分导致的药液激荡、飞溅多产生的压力,根据以往液体晃动论文研究,可以知道在这其中离心力提供大部分压力来源,药液的激荡和飞溅只占很少一部分,所以导致在向心加速度激励下药箱内壁的压力曲线变化趋势较为平缓。不过观察充液比0.7和0.9时的压力曲线不能看出,即使药箱在向心加速度激励下,内壁压力在充液比0.3~0.7之间峰值的大小仍然呈递增趋势,在充液比0.9时依据出现峰值小于0.7充液比的情况,由此可以得知,药箱在向心加速度的激励下仍保持在充液比0.7~0.9时药箱内药液晃动程度最为剧烈的规律。

(a) 充液比0.3
6 结论
本文针对植保无人机飞行过程中由于起飞、降落、急停、转向、平移、绕点旋转和仿地飞行等动作时药箱内药液剧烈晃动导致对植保无人机的整机作业性能及安全方面产生很大影响的问题,设计了一款能够在三维空间内加载激励的特性,充分模拟植保无人机在飞行作业时工况的试验台,并设计了可适配不同形状大小药箱加载机构,保证试验台可以对市面上大部分药箱进行试验分析。通过试验数据分析可以发现矩形药箱在水平激励的作用下普遍存在同一种规律:当药箱充液比为0.3时,被测药箱内壁压力在0.496 s时达到峰值100.3 Pa,然后呈波浪状递减,当药箱充液比为0.6时, 被测药箱内壁压力在0.315 s时达到峰值215.3 Pa,而且随着药箱充液比的增大,药箱内壁压力峰值发生的的时间依次递减;当给矩形药箱施加一个圆周激励时,药箱内壁压力在充液比0.3~0.7之间峰值的大小仍然呈递增趋势,但是在药箱充液比0.9时出现内壁压力峰值小于充液比0.7的情况,同时在圆周激励下仍保持在充液比0.7~0.9时药箱内药液晃动程度最为剧烈的规律。
猜你喜欢
中国测试(2022年2期)2022-03-19 09:57:30
锻压装备与制造技术(2021年2期)2021-07-19 08:51:00
空间科学学报(2020年3期)2020-07-24 09:23:26
少年漫画(艺术创想)(2019年7期)2019-11-25 09:23:18
少儿美术(快乐历史地理)(2018年8期)2018-12-03 08:20:56
制造技术与机床(2017年8期)2017-11-27 02:10:05
网络安全与数据管理(2016年4期)2017-01-10 03:44:42
电子器件(2015年5期)2015-12-29 08:43:12
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:46
小朋友·聪明学堂(2014年1期)2014-02-26 10:05:46