对称式对心双曲柄滑块机构在可变结构机构设计中的应用
2021-07-15 01:46:12冷鸿彬
机械研究与应用 2021年3期
冷鸿彬,顾 丹,章 伟,朱 鹏
(四川城市职业学院,四川 成都 610101)
0 引 言
随着社会需求和科技的进步,移动机器人性能不断完善,其应用范围也越来越广泛。在排雷、搜捕、救援、星球探测等领域,要求机器人对各种复杂地形要有很好的通过性和适应性,即具有一定的越障能力、避障能力和环境适应能力[1]。
机器人的悬架设计对其移动性能有着很大的影响,文中将对称式对心双曲柄滑块机构应用于可变结构的机器人悬架机构设计,对与平行四边形、平行六边形两种机构的组合变胞机构进行了特性分析。在此基础上设计了一种可变结构的机器人悬架机构,该机构在通过某些复杂地形,如高低不平的地面、狭窄的缝隙时能够改变自身结构形态和车身横向宽度,因此具有更好的通过性和环境地貌适应能力。
1 对称式对心双曲柄滑块机构特性分析
图1所示为对称式对心双曲柄滑块机构,其有两个主要特征:①机构特征:该机构由两套共用一个曲柄的对心式曲柄滑块组成,两曲柄BC、CD和两连杆AB、DE的尺寸分别相等。两套对心式曲柄滑块机构以C为中心呈中心对称分布;②运动特性:该机构两滑块A、E的运动状态始终相同,只是移动方向相反[2]。曲柄逆时针转动,当α=180°时,两滑块处于距离最远位置;曲柄继续转动至α=360°时,两滑块处于距离最近位置。
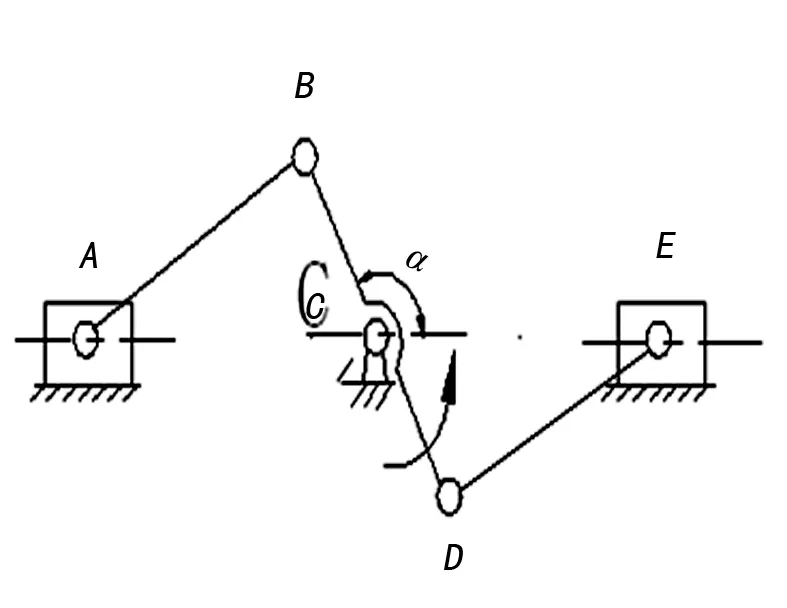
图1 对称式对心双曲柄滑块机构简图
2 与平行四边形组合的变胞机构[3]特性分析
2.1 机构组成原理
如图2所示,该机构由对称式对心双曲柄滑块机构AFEGC和平行四边形机构ABCD组成,且自由度为1。平行四边形机构由于各构件几何尺寸的特殊关系(相对杆件长度相等,或四个杆件长度都相等)在运动过程中都会出现四个杆件共处同一直线位置的情况[4]。β随两滑块距离的增大而增大,减小而减小。曲柄逆时针转动,当θ=180°时两滑块处于距离最远位置,β达到最大值βmax,若杆件取适当的值使βmax=180°,则机构变形成一条直线且自由度变为0,拓扑结构图也发生变化,属于变胞机构的研究范围。当曲柄继续转至θ=360°时,两曲柄处于距离最近位置,此时β达到最小值βmin,机构处于收拢状态。
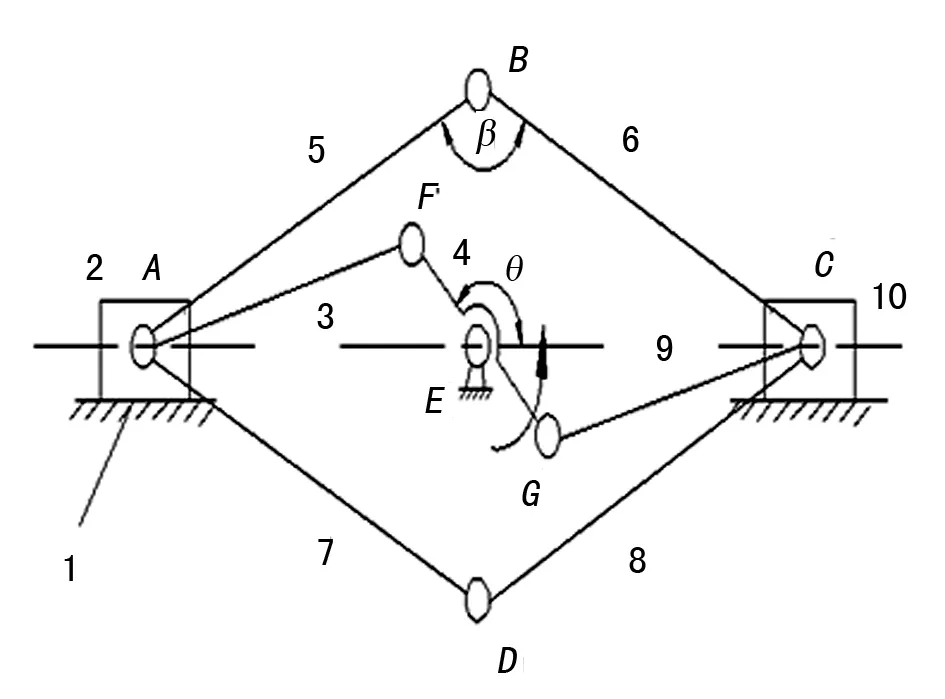
图2 变胞机构简图1.滑槽 2.滑块1 3.连杆1 4.曲柄 5.杆1 6.杆2 7.杆3 8.杆4 9.连杆2 10.滑块2
2.2 机构构态变换分析[5-7]
如图2所示,将曲柄EF与水平的夹角θ(0°<θ<180°)作为机构的第一构态,图3中序号1~10与图2中杆件序号对应。其机构对应的拓扑图如图3所示。
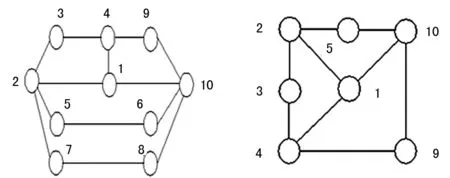
图3 第一构态拓扑 图4 第二构态拓扑图
描述该构态的邻接矩阵为:
当角θ= 180°时,角β=βmax=180°,机构处于水平共线状态,杆件5、6、7、8合并成一个构件,统一用5表示,将其作为机构的第二构态,图4中序号1~10与图2中杆件序号对应。其机构对应的拓扑图如图4所示。
描述该构态的邻接矩阵为:
2.3 杆件尺寸关系

即 2a=2b+c
(1)
当角度θ=360°时,角度β有最小值βmin,且:

(2)
在△ABC中,由余弦定理得:
(3)
将式(1)、(2)带入式(3)可得:
(4)
且由式(1)、(2)可知:
(5)
将式(5)带入式(4)可得:
(6)
若βmin=60°,带入式(4)可得:
(7)
若βmin=90°,带入式(4)可得:
(8)
若要使βmin∈(arccos,90°),结合式(4)、(5)可得:
(9)
3 应 用
3.1 机构组成原理
如图5(a)所示,该机构由对称式对心双曲柄滑块机构MHGLN和平行六边形机构ABCDEF组成,且自由度为1,平行六边形机构具有一定的可展开可折叠性质。以此机构为悬架的机器人具有一定的变形能力,但稳定性较差,因此在其基础上设计了图5(b)所示悬架机构。
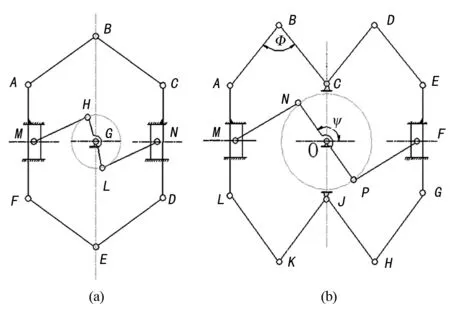
图5 机构简图
该悬架机构由两个对称的平行六边形机构和一个对称式对心双曲柄滑块机构组成,具有较强的稳定性,且自由度为1,控制简单,其控制过程是通过曲柄转动控制两滑块的距离来改变角度φ的大小从而使机器人车身的横向宽度发生变化。当ψ=180°时,角度φ有最大值φmax且φmax=180°,此时机构为完全展开状态,横向宽度最大,遇到横向宽度较大的障碍物时可以不用绕行直接越过;当ψ=360°时,角度φ有最小值φmin,此时机构为收拢状态,横向宽度最小,遇到狭缝时可以直接穿行,从而使机器人具有更好的越障避障能力。
3.2 角度φ与ψ的关系

(10)
在△MNO中由余弦定理得:
(11)
(12)
则由式(10)~(12)可解得:
(13)
其中φ∈[0°,180°],ψ∈[0°,360°)
则式(13)就是角度φ与曲柄转角ψ的关系式。
3.3 杆件尺寸关系
如图5(b)所示,当角度ψ=180°时,角度φ有最大值φmax,且φmax=180°,此时机构为完全展开状态,且有:

(14)
当ψ=360°时,角度φ有最小值φmin,且:

(15)
在△ABC中由余弦定理得:
(16)
将式(14)、(15)、带入式(16)可得:
(17)
由式(14)、(15)可知:
2b=4a-c>0,b-c>0,c=4a-2b>0
(18)
将式(18)带入式(17)可得:
(19)
由式(14)可得:
(20)
将式(20)带入式(18)可得:
(21)
由式(17)可知,若确定φmin的取值范围时,即可得出a、b、c之间的关系式。如取定φmin=60°,带入式(17)并结合式(18)、(21)可得:
(22)
若取定φmin=90°, 带入式(16)并结合式(18)、(21)可得:

(23)
(24)
3.4 横向宽窄度变化
(25)
(26)
式(25)表明:可以通过特定的a、b、c的关系式来控制λ的取值范围。
4 结 语
文中主要介绍了对称式对心双曲柄滑块机构与平行四边形机构组合的变胞机构特性,满足变形要求的杆件尺寸关系和机构构态变换分析。在此基础上设计了一种可变结构的机器人悬架机构,该机构能够根据地形环境变化其横向宽度,且为单自由度机构,控制简单,为可变形机构的设计提供了新的思路。
猜你喜欢
机械工程师(2021年4期)2021-04-19 07:27:56
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
北京汽车(2016年6期)2016-10-13 17:07:50
科技创新与品牌(2016年8期)2016-09-29 22:25:52
工程建设与设计(2016年1期)2016-02-27 10:50:15
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
汽车维护与修理(2014年10期)2014-02-28 12:15:00