
基于UDS协议的汽车控制器刷写软件设计
2021-07-11 19:13唐恒飞王效金
智能计算机与应用 2021年1期
唐恒飞 王效金
摘 要:基于某整车厂提供的控制器和刷写程序(hex文件),利用实验室研发的汽车诊断仪,设计了一款上位机刷写软件。该软件是利用C#语言中的WinForm界面和基于CAN总线的UDS协议进行编写,并且遵循软件设计V型开发流程,主要内容是刷写方案的设计,以及研究上位机软件与控制器之间信息的交互,最后该软件经过上下位机联调测试,可以很好地体现其正确性以及可靠性。
关键词: 刷写;UDS协议;C#;ECU;V型
文章编号: 2095-2163(2021)01-0102-04 中图分类号:TP26 文献标志码:A
【Abstract】Based on the controller and flash writing program (.hex file) provided by a vehicle factory, a flash writing software for upper computer is designed by using the automobile diagnosis instrument developed in the laboratory. The software is written by WinForm interface in C# language and UDS protocol based on CAN bus, and follows the V-shaped development process of software design. The main content is the design of brush writing scheme and the information interaction between the upper computer software and the controller. Finally, the software has been tested by the upper and lower computers, which can reflect its correctness and reliability.
【Key words】flash and write;UDS protocol; C#; ECU; V type
0 引 言
随着互联网技术的迅猛发展,带动整个汽车行业加速走向了智能化。由此即提升了汽车控制单元的控制策略和功能复杂度,进而使得控制器内部软件更新升级的要求也越来越高。因此国内外有众多的学者和企业都在致力于研究汽车控制器刷写。文献[1]基于UDS协议和MPC5634单片机,设计了一款在线升级软件;文献[2]利用LabView编程语言,基于UDS协议设计了ECU刷写上位机软件;文献[3]提出了一种基于UDS协议的汽车ECU升级方案,详细讨论了汽车ECU的BootLoader刷写软件的实现原理。本文则是利用C#语言,基于UDS协议和CAN通讯机制设计上位机刷写软件。整个上位机软件的设计遵循V型开发流程,首先提出设计需求,接着根据需求写出刷写方案,最后通过上、下位机联调测试,抓取报文,从而验证了本文设计的刷写软件的正确性及可靠性。
1 UDS协议及帧类型介绍
1.1 UDS协议
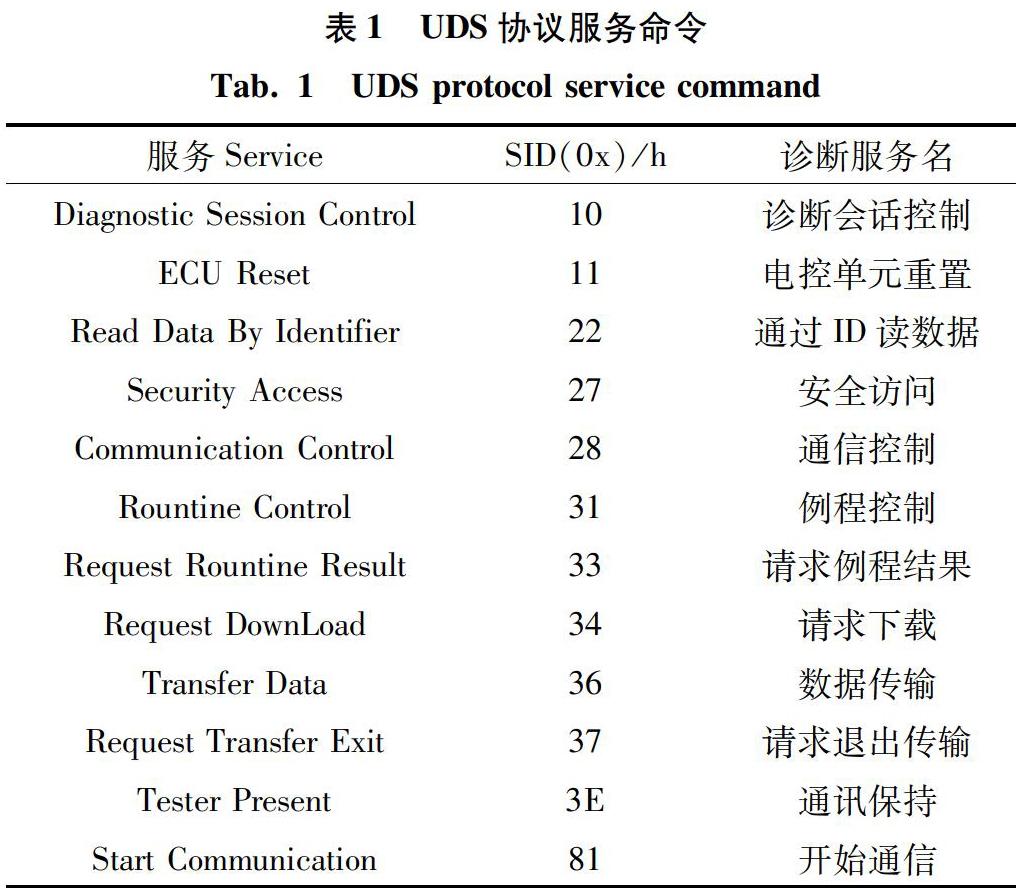
UDS协议是诊断服务的标准规范,规定了诊断服务的具体命令,UDS协议用于刷写的服务命令[4]见表1。
1.2 UDS帧类型
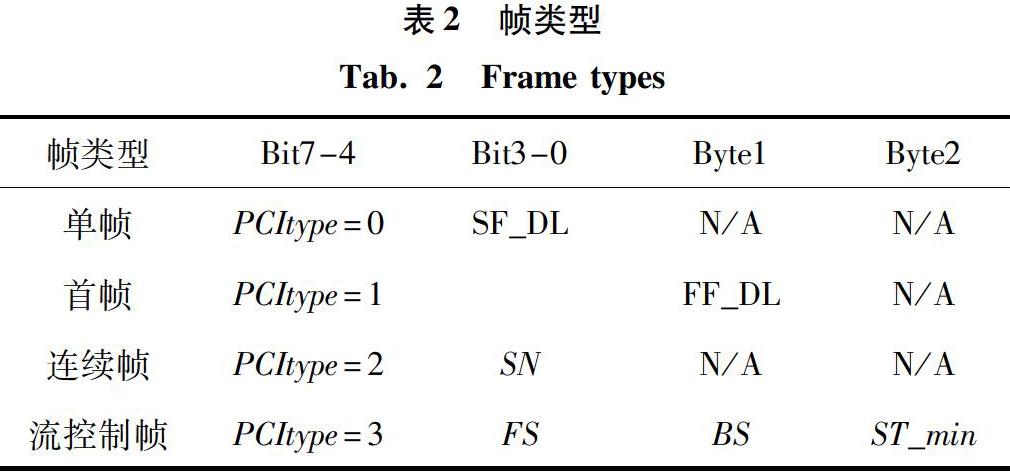
UDS协议可以应用于多种通信机制中,本文所研究的UDS协议是基于CAN总线的。因此UDS协议的消息帧是遵循CAN总线的报文格式。CAN消息帧是由一个或者多个的数据协议单元(PDU)组成,而每一个PDU都包含控制命令(PCI)和数据信息(data)[5]。根据PCI和DATA的字节总数是否超过8个字节,可以将UDS协议帧分为单帧和多帧,其中多帧又包含首帧、连续帧、流控制帧。UDS协议帧类型见表2。UDS协议帧类型可以通过前三个字节进行判别。第一个字节的高4位换算得到的值0、1、2、3决定了当前帧类别。在数据传输中,单帧相对简单点,遵循一问一答的机制,单帧中SF_DL代表着单帧传输中的数据字节数。然而多帧就比较复杂,多帧数据在传输时,上位机软件首先给控制器发送一个首帧数据,首帧数据中包含控制器即将接收数据字节的大小(FF_DL);当控制器接收到该命令消息,给上位机回复一个流控制帧。流控制帧主要有3个参数,流控制帧状态(FS)、连续帧连续发送的最大数目(BS)以及2个连续帧之间的时间间隔(ST_min)。FS有3个值,0、1和2分别代表着继续发送、停止发送和数据溢出。通常在收到流控制帧时,该位常常是0。对于BS,主要对应着一定的范围(0~255);当2个连续帧间的间隔时间超出ST_min时,ECU端就会给上位机端回复一个发送错误的消息帧。最后就是不断地传输连续帧。连续帧中的SN代表着连续帧的连续号,每增加一个连续帧,SN就加1,直到增加到15时,SN重新置0。
2 .hex文件解析
上位机刷写的程序主要是用于ECU升级更新,这些程序经过一些软件编译而生成不同格式文件。.hex文件就是通过Freescal CodeWarrior软件编译而成的一种刷写文件。.hex文件可以通过文本进行打开,打开后的文件内容是一行行记录。这一行行记录都是以冒号开头,内容是16进制码。.hex文件格式见表3。.hex文件传输进ECU前,需要遵循UDS协议对.hex文件进行解析,提取记录数据长度、数据起始地址以及数据内容,提取完毕之后再转换成CAN报文格式将这些数据传输到ECU中。
3 下位机设计
下位机是由实验室基于恩智浦公司的imx6ull芯片進行开发的汽车诊断仪,在此基础上利用codeWarrior软件编写CAN通信模块以及UDS协议栈,用于处理数据的接收与发送,整个设计图如图1所示。上位机通过串口将命令数据发送给诊断仪,经过CAN模块的初始化、接收、发送,通过OBD接口将数据发送给控制器;反之,控制器通过同样的流程将数据传送给PC端。
4 上位机刷写软件设计
整个上位机刷写软件遵循软件开发中V型开发流程进行设计,包含设计需求、刷写流程、代码编写、软件测试、版本释放。本文主要研究的则是上位机软件设计的设计需求、刷写流程以及软件测试。
4.1 设计需求
根据某整车厂提供的控制器和.hex刷写文件,利用实验室研发的汽车诊断仪,设计一款上位机刷写软件。整个系统的架构如图2所示。
4.2 刷写方案设计
4.2.1 刷写流程
通过全面地研究UDS协议,整个刷写流程分为预编程阶段、主编程阶段以及后编程阶段[6]。对此可做阐释分述如下。
4.2.1.1 预编程阶段
预编程阶段是在进行主编程前的CAN网络准备。流程如图3所示。
首先连通上下位机。通电之后,车载电控单元进入诊断默认会话模式[7]。上位机发送0x81请求与控制器进行通信,当上位机收到控制器回复一个包含0xC1的命令时代表通信成功。由于该软件的功能是刷写功能,上位机发送0x28命令,请求停止控制器对上位机进行诊断记录发送,这样可以让CAN总线不处于忙碌状态,在进行刷写时,能够大大减少刷写时间。车载电控单元的程序被更新时,需要电控单元的会话模式处于刷写模式下,因此发送0x10 02命令请求进入刷写模式。对控制器的flash区进行擦除和数据写入,是一个级别较高的操作,需要通过密钥才能进入[7]。向控制器发送0x27 05请求命令,控制器收到请求,给汽车诊断仪回复一个0x67 05 aa bb cc dd的消息帧,aa bb cc dd代表4个seekey,汽车诊断仪对这4个seedkey进行算法计算得到4个掩码,再发送0x27 06 ee ff gg hh给ECU,ECU拿到这4个掩码与内部的动态数据库进行匹配,匹配成功则会回复一个包含0x67 06 的消息帧,代表允许上位机对控制器Flash区进行操作。
4.2.1.2 主编程阶段
主编程阶段主要分为flash区的擦除和数据写入。整个主编程阶段的流程图如图4所示。
主编程部分主要是分为2个部分:对ECU内部进行按地址擦除和数据写入[8]。擦除操作时,上位机发送0x31命令,通过解析.hex文件,提取擦除的起始地址,以及擦除空间的大小,所以完整的擦除命令是0x31 01 EE 00+xx xx xx xx(起始地址)+xx xx xx xx(擦除的空间大小)。当擦除完毕时,ECU将会给上位机回复一个0x71 01 EE 00的报文消息,接着上位机软件与控制器确定需要下载的起始地址和长度,发送0x34命令,完整的报文是0x34 00 44 +80 xx xx xx(起始地址)+xx xx xx xx(下载空间大小)。当ECU接收到该报文之后,将会给上位机回复一个含有0x74 20 xx xx的报文的正反应报文。已知程序传输的地址和最大长度之后,.hex文件被解析得到的数据字节转换成CAN总线通讯格式传输到ECU中的固定地址区[8],上位机发送的命令是0x36 01(传输的区块)xx xx xx xx xx...(传输的数据)。传输的过程是对ECU端的区块进行写入数据。当每传输一个区块的数据完成时,控制器将会给上位机软件回复一个含有0x76 xx(当前传输的数据区块数)的报文,来表示当前该区块传输的数据成功。传输的数据量很大,因此需要多次地发送0x36命令,直到所有的数据传输完毕。当所有的数据传输完成,此时上位机软件将会发送0x37请求命令,请求退出数据传输。当该命令发出后,ECU给上位机回复含有0x77的报文时,一个地址的刷写流程已经完整结束了,也代表着刷写中流程的结束。
4.2.1.3 后编程阶段
后编程阶段主要是校验写入的程序是否完整来判断整个刷写操作是否成功。后编程阶段的流程如图5所示。
当控制器退出数据传输状态,上位机就立刻发送0x31 01 DD FF 01命令,请求检查刷写程序的完整性,收到0x71 01 DD FF 01命令就代表了此次车载电控单元程序刷写成功。上位机发送0x11命令请求,重新启动ECU。
4.2.2 Winform界面与数据库设计
Winform界面主要有3个界面,即:登录界面、控制器选择界面以及刷写界面。界面设计用到一些简单的控件,如label,button,textbox,ProgressBar等。通过触发button控件的Click()事件,从而在界面上显示相关的信息以及进行刷写操作。数据库的设计是建立一张刷写文件的表格,关键字段有ECU_Name,ECU_SoftWareNumber和.Hex文件名等。在读取控制的软件版本号,依靠这些关键字段的查找,匹配成功之后从服务器后台下载刷写文件。
4.2.3 通讯逻辑层设计
本次设计的刷写软件属于自动化刷写,在选择好刷写文件之后,点击一键刷写,流程如图6所示。
上位机软件抓取到的数据流都是通过串口进行发送和读取的,因此在逻辑层中设计了发送函数SendMeaasge()和读取函数ReceiveMessage()。客户端软件打开之后,通过ECUInit()函数和私有协议与汽车诊断仪连接成功。在选择控制类型时,触发button控件的Click事件,利用发送函数向串口发送包含0x81、0x22的命令用于连接控制器和读取控制器版本信息,将读取到的数据流进行解析,并带入数据库中去匹配,从而再从后台下载刷写文件。刷写文件直接存储到固定文件夹下,当点击刷写文件时,可以直接打开文件所在的位置。开始刷写是软件操作过程中最复杂的过程。.hex文件傳输进ECU前,需要遵循UDS协议对.hex文件进行解析,提取记录数据长度、数据起始地址以及数据内容,提取完毕后再转换成CAN报文格式,将这些数据传输到ECU中。在C#中,通过对文件流的读取,利用substring()函数将所需的数据地址,数据内容等参数截取下来,存放到临时的字符串数组中,以便在数据传输时能够在线发送。
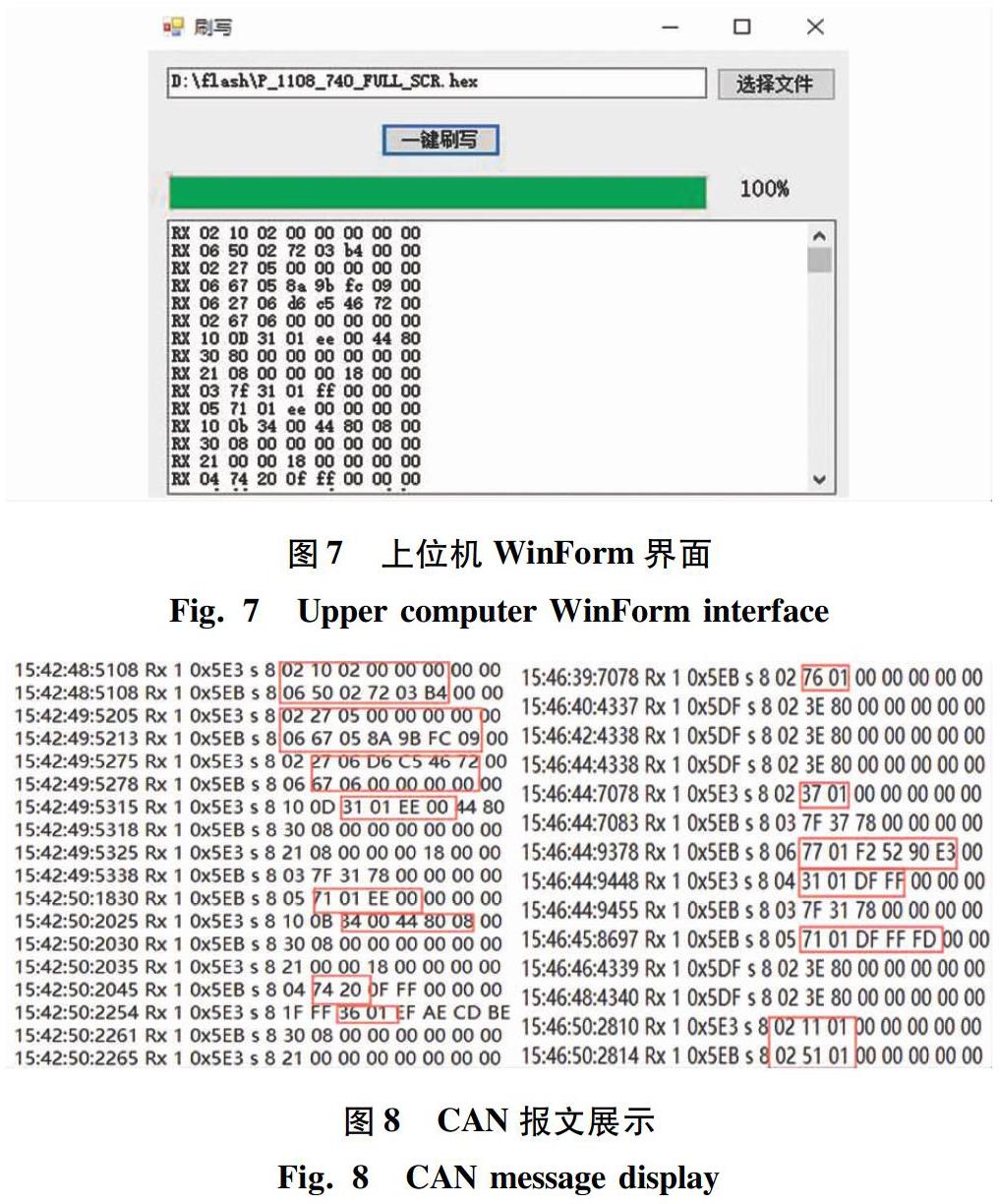
4.3 软件测试
为了验证刷写软件设计的正确性和适用性,进行了上下位机联调,上位机刷写界面和通过CANList-2抓取到部分的CAN报文信息分别如图7、图8所示。从报文中可以看出,首先进入刷写模式下(0x10 02),接着进入安全校验(0x27 05/06),然后擦除对应的flash区(0x31 01 EE 00),擦写完毕后,将需要写入的数据传输给控制器(0x36),传输结束后将会退出传输状态(0x37),为了检验刷写的数据是否完整,即发送请求进行校验(0x31 01 DD FF 01),最后将控制器进行硬件重启(0x11 01),刷写功能就完成了。从这些监测到的报文也就能够证明刷写的正确性和适用性。
5 结束语
在本文中,利用C#語言编写了上位机刷写软件,利用V型软件开发流程,为从事汽车控制器刷写的研究者提出了一种上位机刷写方法,而且基于UDS协议和CAN通讯机制对上、下位机之间的信息交互做了详细的介绍,也可为亟欲快速、全面地了解汽车控制刷写的初学者提供一些有借鉴意义的参考。但是本文的设计也存在着不足,诸如只是针对某整车厂的控制器进行刷写,未能对其他系统下的控制器进行刷写,因而亟待后续研究的进一步完善。
参考文献
[1]马宏伟,吴长水. 基于统一诊断协议的控制器在线升级系统设计[J].软件工程,2020,23(8):5-8.
[2]李娇娇,张宏伟,陈金干. 基于LabVIEW新能源汽车控制器刷写软件设计[J]. 软件工程,2020,23(2):16-18,8.
[3]吴进军,方继根,王西峰,等. 基于CAN总线的新能源汽车ECU控制器程序刷写系统设计[J].机电产品开发与创新,2018,31(2):1-3,7.
[4]ISO 14229. Road vehicles-unified diagnostic services[S].Geneva,Switzerland:ISO,2012.
[5]罗峰,孙泽昌.汽车CAN总线系统原理、设计与应用[M]. 北京:电子工业出版社,2010.
[6]王涛.基于CAN诊断汽车控制器刷新软件的设计与实现[D]. 成都:电子科技大学,2015.
[7]聂幸福,孟晨兴.基于UDS的BootLoader上位机实现[J].汽车工业研究,2018(7):26-29.
[8]耿琦,葛亮,高东明,等.基于OTA技术的车辆远程数据刷写研究及应用[J].电子测试,2017(15):74-75.
