
基于LQR算法的车道保持控制策略
2021-07-11 18:44施卫张晨
智能计算机与应用 2021年1期
施卫 张晨


摘 要:介绍一种基于LQR算法的车道保持控制方法。采用TLC与DLC联合预警模型结合驾驶员意图识别对车辆当前的行驶状态进行判断并在偏离时做出报警,当驾驶员未做出反应时车道保持系统对转向系统的输出转角值进行转向控制,帮助驾驶员纠正车辆偏离动作,在Carsim/Simulink环境下进行仿真,对比不同车速下横/航向偏差量与输出方向盘转角关系,结合车辆偏离预警算法实车测试,对该控制策略的可行性进行验证。结果表明,该控制策略的实时性和鲁棒性较好,具有实用价值。
关键词: 车道保持;车道偏离预警;驾驶员意图
文章编号: 2095-2163(2021)01-0020-05 中图分类号:U461.91 文献标志码:A
【Abstract】This paper introduces a lane keeping control method based on LQR algorithm. This paper uses TLC and DLC joint early warning model combined with driver's intention recognition to judge the current driving state of the vehicle and give an alarm when the driver deviates. When the driver does not respond, the lane keeping system controls the output angle value of the steering system to help the driver correct the vehicle deviation. The simulation is carried out in the CarSim / Simulink environment, and the transverse / heading at different speeds is compared. The relationship between the deviation and the output steering wheel angle, combined with the actual vehicle test of vehicle deviation warning algorithm, the feasibility of the control strategy is verified. The results show that the control strategy has good real-time performance and robustness, and has practical value.
【Key words】lane keeping; lane departure warning; driver's intention
0 引 言
随着全球化的日益推进,车辆智能辅助驾驶技术也在不断地发展,从最初的车身传感器对车辆行驶时路面动静态特征的监测捕捉,到后来的基于机器视觉和路面特征对车道线的检测识别[1],都充分说明了车辆智能控制技术的适应性与研究的必要性。
为了适应社会发展与市场需求,对车道偏离预警技术[2]和车道保持控制技术[3-4]的研发已然引起了越来越多研究人员和学者的兴趣与关注。本文在车道偏离预警及车道保持方面提出一种新的策略,通过建立基于路面附着系数TLC与DLC的联合预警模型,结合LQR算法的车道保持控制策略。相较传统预警及車道保持策略,该模型适用性较强且准确性较好。
1 车道偏离预警策略分析
本文所搭建的车道偏离预警模型为基于路面附着系数的TLC与DLC联合预警模型。TLC模型的主要原理是通过计算车辆发生偏离时车辆到两侧车道线间的最短时间与所设定的阈值作比较,对车辆是否会触碰到车道边界做出判断。建立TLC模型主要就是为了判断车辆接下来的行为是否存在偏离动作。即对车辆在接下来的一定时间内建立车辆动力学模型,根据车辆动力学模型和对前方道路的识别,对车辆所需最短跨道时间进行计算,当车辆跨道时间小于设定的阈值时,表明此时车辆偏离程度大,系统予以报警,提醒驾驶员及时纠正偏离动作;当跨道时间大于设定阈值时,系统不予以报警。
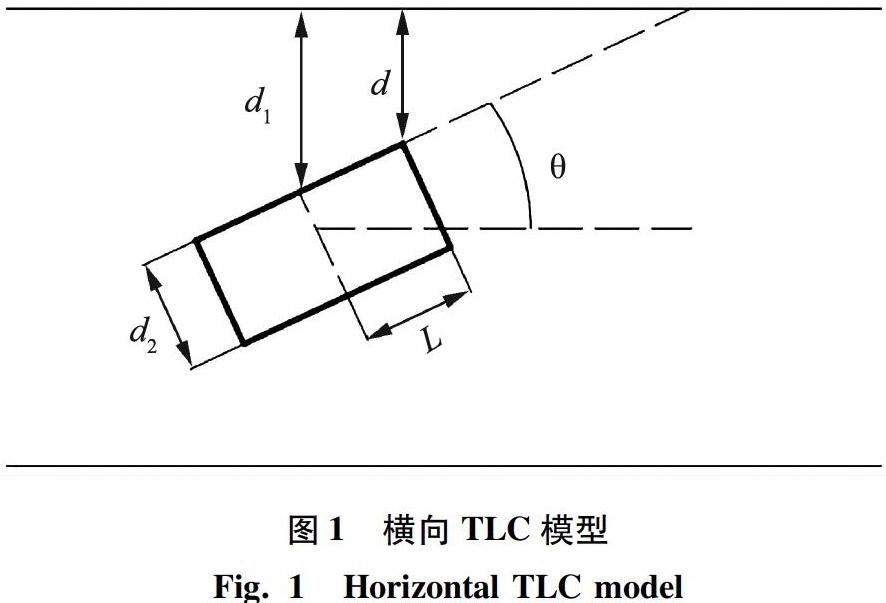
假设车辆在进行往左车道线偏离的运动,模型原理解析如图1所示。图1中,d2表示车辆前轮之间的轮距,d1表示车辆质心与左侧车道线间的垂直
距离,l表示车辆质心与前轴之间的距离,θ表示车辆发生偏离时的横摆角。则车辆此时到左侧车道线的最短距离为左前轮与左车道线之间的垂直距离,记作d,d的计算公式如下:
现将车道偏离的判断条件分为2部分:对横向TLC模型的阈值判断和对DLC的距离计算。以路面附着系数m作为判定条件,建立TLC与DLC的联合预警模型,具体如图2所示。
由式(1)可知,假设车辆向左侧车道线偏离,则此时车辆距左车道线的最短距离为左前轮与左车道线间的垂直距离d。而d的计算需要求得车辆质心与左车道线间的垂直距离d1,由图2可知,d1可通过输入的车道宽度
(端口6)和车辆横向偏差(端口2)求得。而质心到前轴的距离l与两前轮间的轮距d2可在Carsim中设置,详见图2,车辆横摆角为θ(端口3),由此可求得车身与车道线间的最短距离d。模型中以60 km/h作为基准车速,此时所设定的TLC和DLC的阈值分别为0.2 s与0.6 m。端口4为实际输入车速v,将实际车速与基准车速作比值,当实际车速大于或小于设定的基准车速时,根据其与基准车速的比值关系,所设定的阈值也会跟着调整。当车速过快时,设立的TLC与DLC阈值也会相应增大,从而保证预警的及时性,给驾驶员预留更多的反应时间。在TLC模块,根据上述求得的d与横向车速的比值来计算车辆碰到车道线的时间t。当t值小于所设定的阈值时,则触发系统的报警提示;在DLC模块,将求得的d值与设定的阈值作比较,当车辆与车道线之间的距离小于设定阈值时,此时系统予以报警。将路面附着系数m作为判定条件,来决定2种模型的具体触发情况。当输入的路面附着系数值m(端口1)大于设定值时,采用TLC模型;反之,则采用DLC模型。
在驾驶员意图识别方面,考虑其主要是为了判断车辆的行驶过程是否在按照驾驶员意图运动及驾驶员的注意力是否集中等。本文依据转向灯信号、油门制动踏板的位置信号及方向盘转角信号来判断驾驶员对车辆的操纵状态,该识别判定过程如图3所示。
2 车道保持控制策略设计
2.1 车辆动力学模型
研究可得,单车动力学模型的原理解析如图4所示。本文所搭建的车辆动力学模型为线性二自由度的模型,考虑到车辆在实际行进过程中左右车轮在做横向方向的运动时转过的角度是相等的,即可以近似地认为车辆在做关于路面平行的平面运动,类似于单车模型(在车辆的前后轴,2车轮可合并看作一个车轮),此时只需要考虑车辆的侧向运动和横摆运动。
假设忽略纵向空气动力学的作用,在不考虑载荷的左右转移及轮胎纵横向耦合关系的影响下,根据牛顿力学定律对车辆模型在各个方向的受力情况进行分析,分析后的结果可表述如下。
2.2 基于LQR车道保持模型
LQR算法(线性二次调节器)属于现代控制理论中发展较为成熟的一种策略体系。利用该算法可以得到状态线性反馈系统的最优控制,根据其对状态空间规律的设计来形成闭环控制,相较于其他控制算法,该算法所形成的闭环控制效果较优。LQR算法的主要原理是通过对状态反馈器K的设计来计算二次型目标函数J。当目标函数J取得最小值时,该时刻反馈器K的解为所求状态最优解。而状态反馈器K的取值是根据权矩阵Q和R的值来决定的。在实际道路中,当车辆以不同的车速行进时,不同取值下的权矩阵Q与R对该算法模型的控制效果有着很大影响。因此在LQR算法中,合适权矩阵的选取显得尤为重要。本文所建立的LQR算法模型主要有4个控制变量,分别为:车辆横向偏差、横向偏差率、航向偏差和航向偏差率,分别用e1、e·1、e2和e·2来表示。根据4个状态控制分量及车辆模型的空间状态方程可将目标函数J定义为如下公式:
假设所优化线性系统的状态是趋于稳定的,即当t的值趋近于无穷大时,x趋近于0。此时为了求得K的最優解,需要选取一个合适的常量矩阵P,则K可表示为:
此外,选取的矩阵P必须是里卡提方程的正定解,即:
将常量矩阵P代入上述各公式,经过迭代计算后求得K的解即为所求最优解。
3 仿真与实车测验分析
本文选择联合偏离预警模型来建立基于LQR算法的车道保持控制策略并对其进行仿真实验以验证算法模型的有效性。下面基于Carsim/Simulink对该算法模型进行联合仿真,文中设计的车道保持系统模型如图5所示。所设置仿真道路模型为一段S型曲线,为对比不同车速下的具体仿真效果,设定了3种车速模型,分别为60km/h、70km/h和90km/h。在不同车速下算法模型的横向偏差、航向偏差以及车道保持系统控制下转向系统输出转角值随时间变化的仿真效果如图6所示,并在实际道路中对车道偏离预警算法进行实车测验,效果如图7所示。
分析图6可知,在该算法对车辆模型的控制过程中,最大横向偏差约为0.2 m,持续时间较短,道路跟踪效果较好;最大航向偏差约为1rad,此时车道保持系统控制下转向系统输出转角值约为23°,能及时帮助驾驶员纠正车辆的偏离动作。通过对该算法的上述仿真测验可知,基于LQR算法搭建的车道保持控制模型具有较好的实时性和鲁棒性。由图7可知,所搭建的车道偏离预警模型适用性和有效性较好。
4 结束语
本文研究的车道偏离预警技术和车道保持控制技术是车辆智能辅助驾驶系统的重要组成部分,通过仿真实验与实车测验可知该模型具有一定的实用价值与应用前景。
参考文献
[1]李唅.基于机器视觉的高速车道标志线检测算法的研究[D]. 沈阳:东北大学,2006.
[2]余天洪. 基于机器视觉的车道偏离预警系统的研究[D]. 长春:吉林大学,2006.
[3]MAMMAR S, GLASER S, NETTO M. Time to line crossing for lane departure avoidance: A theoretical study and an experimental setting[J]. IEEE Transactions on Intelligent Transporation Systems, 2006,7(2):226-241.
[4]MAMMAR S, MINOIU-ENACHE N M, GLASER S, et al. Lane keeping automation at tire saturation[C]// Proceeding of the American Control Conference. Baltimore, Maryland:IEEE, 2010:6466-6471.
