抑制参数漂移的非线性系统神经网络跟踪控制
2021-07-08 02:15:42何诚,吴剑,张哲
兵器装备工程学报 2021年6期
何 诚,吴 剑,张 哲
(南昌航空大学, 南昌 330063)
在实际工程系统中,系统参数值往往受到系统内部模型的改变以及外界不确定干扰的存在而产生变化,这种不受控的参数值的改变会破坏系统的稳定性。如文献[1]中电机负载的改变会使系统的参数产生漂移。目前非线性系统的参数漂移的研究成果较少,因此本文针对非线性系统的参数漂移问题做进一步的研究。
非线性纯反馈系统[2-3]是更普遍的系统,其控制输入和状态变量都具有非仿射结构,因此非线性纯反馈系统更能反映实际工程系统的情况。RBF神经网络模拟人脑的局部神经网络结构,已证明RBF神经网络能以任意精度逼近任何连续函数[4-6]。近年来,针对RBF神经网络自适应的控制研究引起了学者的广泛关注,且在文献[7-9]中给出了基于Lyapunov方法的神经网络控制系统稳定性分析方法。在很多文献中都要求系统模型是已知[10-12],然而在许多实际工程系统中,系统的精确模型不能被提前获取,并且由于外界干扰的存在,系统的精确模型更难被准确测量,于是我们引入了RBF神经网络来对系统有关未知模型逼近,以解决未知系统模型的问题。
1 问题描述
1.1 非线性纯反馈系统
非线性纯反馈系统是更加普遍的非线性系统,其状态变量和控制输入存在的非仿射结构,这就意味着系统状态和输入之间存在强耦合,因此很难找到稳定的控制器。我们考虑如下的非线性纯反馈系统:

(1)

式(1)比传统非线性纯反馈[2-3]增加了未知参数项,其中Ξi可表示为具有任意维度的未知向量,即hi可为任意正常数。
引入中值定理[14],系统(1)可以被写成:

(2)

从系统(2)可以看出,中值定理分离了系统(1)中fi(·)的非仿射结构。

假设2参考信号yd是光滑连续且n阶可导的有界函数。

假设4 未知参数是有界的,存在一个有界集Ω,满足
Ω={Ξ∶||Ξ||≤Ξ0}
(3)
式(3)中, Ξ0是已知的正常数。
1.2 充分光滑投影算法[13]
(4)
式(4)中符号信息定义如下:
其中σ>0和δ>0为任意正常数。


1.3 RBF神经网络
RBF神经网络对未知函数具有良好的逼近能力,其广泛应用在控制理论、图像处理和人工智能领域中。
RBF神经网络的数学表达式为:
φ=WTS(Z)
(5)
其中,W=[w1,w2,…,wl]T∈Rl表示神经网络的权重向量,l>1是神经网络的节点数;Z∈ΩZ⊂Rq是神经网络的输入向量,q是神经网络的输入维度;S(Z)=[s1(Z),s2(Z),…,sl(Z)]T∈Rl是基向量函数,si(Z)是第i个节点的输出。通常选择的基函数si(Z)为下面的高斯基函数:
其中,r是高斯基函数的宽度,ξi=[ξi1,ξi2,…,ξiq]T是高斯基函数的中心。RBF神经网络能以任意精度ε逼近紧集ΩZ∈Rq上的任何连续函数φ(Z)为:
(6)
式(6)中,ε(Z)是逼近误差且满足|ε(Z)|≤τ。对于所有的Z∈ΩZ,W*的值就是使得逼近误差ε(Z)最小的W值,其定义为:
2 控制器设计
在本节中,反步法被呈现。反步法包含n步。在第i步(i=2,…,n-1),设计出虚拟控制器和自适应律,由RBF神经网络逼近有关未知函数项。在第n步,给出实际控制器。
(7)
根据 Young’s不等式,式(7)可获得以下不等式:
(8)
(9)
步骤1根据z1=x1-yd和系统(2),我们有
(10)
构造如下的Lyapunov函数为:
(11)
式(11)中,γ和ξ是正的设计参数。
V1关于时间求导得:
(12)
虚拟控制器设计为:
(13)
式(13)中,k11和k12是正的设计参数。
把式(13)代入式(12)得到:
(14)
(15)

RBF神经网络自适应律和参数自适应律设计为:
(16)
(17)
根据充分光滑投影算法的性质2,把式(16)和式(17)代入式(15)可得:
(18)
式(18)中,
步骤i根据zi=xi-αi-1,我们有
(19)
式(19)中,
构造如下的Lyapunov函数:
(20)
Vi关于时间求导可得:

(21)
虚拟控制器设计为:
(22)
其中,ki1和ki2是正的设计参数。
把式(22)代入式(21)得到:

(23)


(24)
RBF神经网络自适应律和参数自适应律设计为:
(25)
(26)
根据充分光滑投影算法的性质2,把式(25)和式(26)代入式(24)可得:
(27)
式(27)中,
步骤n根据zn=xn-αn-1,我们有
(28)
其中,
构造如下的Lyapunov函数:
(29)
Vn关于时间求导得
(30)
实际控制器设计为
(31)
式(31)中,kn1和kn2是正得设计参数。
把式(31)代入式(30)得到
(32)

(33)
RBF神经网络自适应律和参数自适应律设计为
(34)
(35)
根据充分光滑投影算法的性质2,把式(34)和式(35)代入式(33)可得
(36)
式中,

(37)
在t∈[0,T],对式(37)积分可得
(38)
以及考虑到V(T)≥0,我们有
(39)
因此,得出以下定理。
定理1对于系统(1),如果系统满足假设1~4,且采用虚拟控制器(22)、实际控制器(31)、RBF神经网络自适应律(25)和参数自适应律(26),则跟踪误差是一致最终有界的,闭环系统是稳定的。
3 仿真研究
在本节中,采用2个仿真实验来证实所设计控制方法的正确性。
例1数值仿真。
考虑如下的二阶非线性纯反馈系统:
(40)


其中i表示节点数。
图1表示系统输出信号y的跟踪轨迹和参考信号轨迹yd;图2表示系统的状态变量轨迹;图3表示系统的输入信号u(t);图4是未知参数Ξ1的估计曲线;图5是未知参数Ξ2的估计曲线;图6为RBF神经网络自适应律的曲线;图7是本文所设计控制器的跟踪误差与文献[12]中跟踪误差曲线,从图7可以看出,本文的跟踪性能更加优越。

图1 跟踪性能轨迹

图2 系统状态变量轨迹

图3 系统的实际控制律u(t)曲线

图4 参数Ξ1的估计曲线
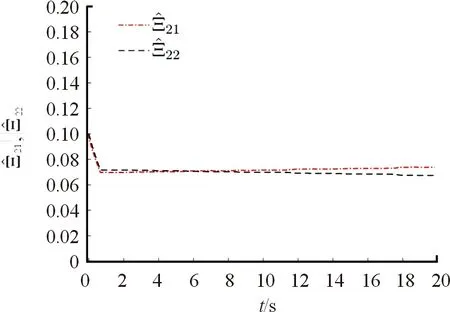
图5 参数Ξ2的估计曲线

图6 RBF神经网络自适应律和曲线

图7 跟踪误差曲线
例2 物理仿真。
考虑如下的机电系统[16]:

(41)


图8表示系统输出信号y的跟踪轨迹和参考信号轨迹yd;图9表示系统的状态变量轨迹;图10表示系统的控制输入信号u(t);图11是未知参数e21、e22、e23的自适应律曲线;图12表示本文所设计的控制器的跟踪误差。

图8 跟踪性能轨迹

图9 系统状态变量轨迹

图10 系统的实际控制律u(t)曲线

图11 未知参数e21、e22、e23的自适应律曲线

图12 跟踪误差曲线
4 结论
本文研究了具有未知参数的一类非线性纯反馈系统的神经网络自适应跟踪问题。结合充分光滑投影算法和RBF神经网络设计出新颖的虚拟控制器、实际控制器以及自适应律,解决了未知非线性纯反馈系统中未知参数漂移的问题,设计的控制器能够使闭环系统的跟踪误差收敛到原点的一个小邻域内。最后的仿真研究进一步证明本文设计方法的正确性。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
电子制作(2019年19期)2019-11-23 08:42:00
现代装饰(2018年5期)2018-05-26 09:09:39
成都信息工程大学学报(2018年6期)2018-03-21 05:46:12
中国三峡(2017年2期)2017-06-09 08:15:29
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
电源技术(2015年5期)2015-08-22 11:18:38
海军航空大学学报(2015年4期)2015-02-27 13:45:47