
基于机器视觉的机械指针式仪表的读数识别方法
2021-07-07 06:54王江柳国栋张玉鑫吴松林
电子测试 2021年7期
王江,柳国栋,张玉鑫,吴松林
(西京学院 机械工程学院,陕西西安,710123)
0 引言
机械指针式仪表结构简单、易维护且价格低,在工业生产实践中广泛应用,是获取机械设备信息,实现设备状态监测的重要手段之一。
通常,机械式仪表信息的获取是由指针示值或其偏转值来表达的,经人工判读或记录抄写的方法获取。判读或抄写过程容易受到各类主客观因素的影响,如观察角度、技术能力、现场条件、光线等环境因素。人工判读及抄写费时、费力,且不能保证完整、准确,易产生读、写误差,结果不能及时、准确地获取机器运行状态参数的变化信息。
应用机器视觉及数字图像处理技术,研究指针式仪表读数方法及信息识别的技术始终是应用研究的热点问题之一[1],并已成功地应用到了工业生产的实践中。例如,张凤翔等应用图像线检测原理实现了机械指针式仪的读数识别[2]。郭子海等应用Hough变换法进行仪表关键要素的位置检测,并运用刻度相关系数实现读数识别[3]。利用剪影法,赵艳琴等以仪表指定转心作为研究的主要素,进行标记识别[4]。同样,F.Correa Alegria与A.Cruz Serra也使用剪影法,利用类比图像重叠差分算法标记仪表转心,确定机械式指针与刻度线的相对关系识别,实现读数识别的方法[5]。Kyong-Ho Kim等人,利用图像分割算法及几何投影技术实现了指针仪表的表盘及指针的有效图像识别。德国的马尔公司也同样使用了图像处理技术做出了875系列的仪表检测仪,能够快速、准确、有效的进行读数,但是其成本高,修理困难。
结合Hough变换算法,本文提出了一种新的指针式仪表读数的自动识别方法。有三个主要的步骤:首先是图像预处理,包括缩放与图像调正,灰度化、平滑去噪、二值化以及边缘检测,以提高图像的信噪比。其中,使用轮廓跟踪法进行表盘区域与指针区域的分割,同时进行了降噪处理;其次是指针直线的检测,包括使用形态学的方法进行仪表指针细化,通过Hough变换法实现了指针位置检测与指针方向的确定。其中,利用剪影法确定了仪表回转中心;最后使用角度与刻度线关系确定仪表盘有效量程,完成了指针式仪表示数的自动读数识别。
本文利用GUI平台进行了相关的实验研究,并进行了直线检测、刻度线重合度的误差分析,为提高检测精度提出了相应的解决方案。
实验完成了三类共20余幅有代表性的指针式仪表图像处理及读数识别实验,实验结果表明:应用本文提出的变换法获取的指针式仪表读数比人工读数识别的精度高20%-30%。本文所提出的自动读数识别方法更准确、可靠且读数效率高,省时省力,对企业机械设备的状态监测具有明显的现实意义。
1 仪表图像采集及读数识别方法
本文以企业生产实际中普遍使用的指针式仪表为对象,研究自动化地读取机械式指针仪表指示信息的方法。图像采集上,利用拥有固定行走路线的户外巡检机器人,巡检过程中机器人在指定工位利用安装在其上部的摄像头拍摄指针式仪表,并获取图像。如图1所示。其中图1(a)为普通压力表,图1(b)为不锈钢压力表,图1(c)为WSS仪表,图1(d)为耐震压力表,仪表图像的分辨率为1080*1080。
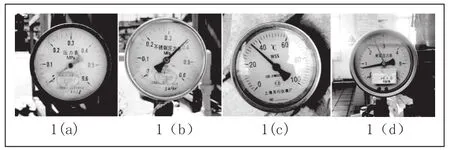
图1 工业生产中使用的各类指针式仪表
不难看出,现场使用的机械式指针仪表图像背景复杂,光照条件不一,客观因素对图像质量有较大影响,对人工读取、抄写仪表信息有较大影响。一般,利用图像处理技术进行信息识别时,首先是图像变换,即将原始图像转换为灰度图像;再进行灰度值的统计分析,并据此进行灰度图像的二值化处理;利用图像处理算法实现指针和表盘的区域分割,再应用相关的变换算法实现关键要素,如指针直线和仪表指针回转中心的识别,从而确定仪表表盘量程,最后获取相关显示信息的识别,即仪表读数识别。一般情况下,当光照条件较好且没有明显变化时,上述图像处理方法是适用的。但现场条件千变万化,如机器人每次拍摄的角度,光线过亮或暗弱以及拍摄上下位置不一或抖动等,对所获取的图像都会产生影响。
其如图2所示,指针式仪表图像数据主要靠安装在户外巡检机器人上部的摄像头,拍摄到的指针式仪表图像以四芯网线传输给机器人的主控制盒,再通过无线传输方式将图像数据传回给中央控制计算机,即后台计算机。运用事先设置后的运算程序,对所取的图像逐一进行在线处理,获取图像主要素的特征,并实现仪表显示信息的识别。
图2所示为仪表图像采集系统各部件的关系连接图,安装在巡检机器人的摄像头获取的图像数据经过四芯网线传输到主控制盒,主控制盒通过RS232总线传输至无线数据传输单元,再由无线数据传输模块将压缩好的仪表图像数据传输给中央控制计算机,进行实时图像处理、分析。
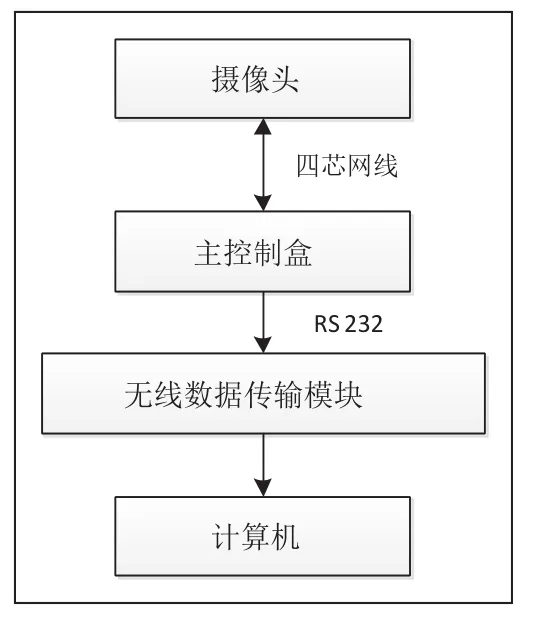
图2 系统硬件整体结构框图
图3所示为本文进行机械式指针仪表图像处理的流程图,包括仪表图像输入、缩放及图像位置调整等初级技术处理;灰度值统计分析、平滑处理、二值化及边缘检测等图像预先处理;再进行仪表盘主要素的定量分析,即指针分析及仪表量程分析,前者涉及指针的细化、直线检测、回转中心定位及指针定位等,后者主要是量程的定量化计算;最后进行仪表指示信息的识别。
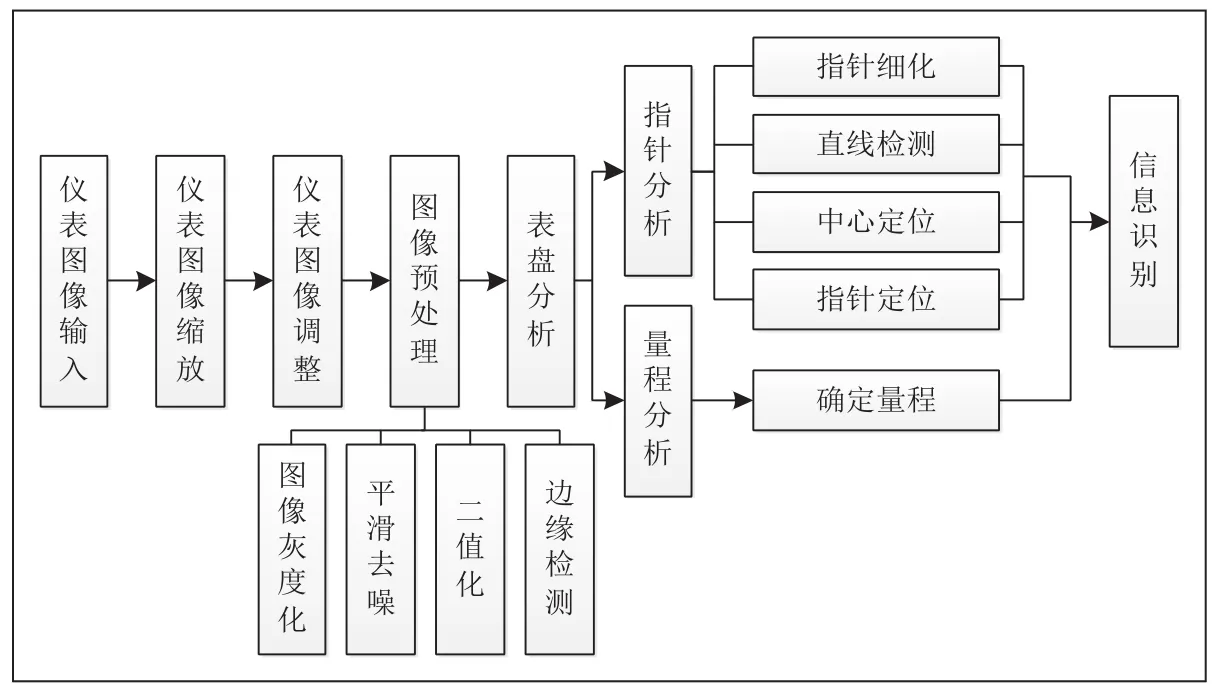
图3 仪表图像处理流程图
2 图像处理及特征识别方法
经过缩放及调整后,仪表图像处理的第一步图像的预先处理,即灰度值的统计分析、平滑处理、二值化及边缘检测。图像平滑处理的目标是去除图像噪音,采用的方法是非线性中值滤波算法。
图4所示为预处理主要过程及相应的处理结果。图4(a)为仪表原始图像,图4(b)为经过中值滤波处理后的图像,其中仪表盘面上的噪音点明显减少;图4(c)为仪表图像二值化的处理结果;图4(d)为利用Canny算子进行边缘检测的结果。

图4 图像预处理过程及结果
图像预处理完成后,进行仪表图像主要素的特征识别,包括表盘轮廓与仪表指针的特征参数识别。原理是利用轮廓跟踪法对主要素的边缘进行跟踪,然后按照顺序将主要素边缘点找出并描绘出来,最后是统计分析。由于预处理获得的图像要素较多,相应的轮廓区域复杂、多样为获取表盘区域增加了较大的难度。本文采用如下步骤实现主要素的边缘跟踪。
⑴以图像左上方为轮廓跟踪的起始点,对整个图像区域的像素点进行逐点分析、跟踪,以能折返起点并形成闭合区域者为有效轮廓,最后在轮廓区域内填充;
⑵按照上述步骤重复寻找下一个轮廓区域,再填充,直至完成整个仪表表盘图像的分析、跟踪;
⑶根据分析、跟踪过程获得的数据进行二值化处理,得到整个表盘区域。
如图5(a)、(b)所示,分布是经过上述步骤后获得的边缘图像和填充后的轮廓跟踪结果。

图5 仪表表盘轮廓跟踪结果
为获取指针式仪表主要素,即表盘和指针的特征,采用面积最大化方法,将原始图像和处理后得到的指针图像相叠加,再相减最终获得了主要素表盘与指针区域的图像,如图5(c)、(d)所示。
一般,指针式仪表中的主要素都是直线,如指针直线和构成表盘的短直线族。首先利用形态学方法对图5(c)、(d)所示仪表图像进行细化处理,再应用Hough变换法进行直线检测,将图像中的几何形状变换为参数集合。
以上述结果为基础,统计出刻度线所的圆心位置,即表盘回转中心的位置Po(x,y)。应用轮廓边缘跟踪求出最小刻度线点Pmin(x,y)、最大刻度线点Pmax(x,y)及有效量程θ,如图6(a)所示。最后根据指针直线位置进行刻度读数的标记,如图 6(b)所示。

图6 仪表有效量程范围的确定及标记
设θmin为最小刻度角,θmax为最大刻度角,ωmin为仪表最小读数值,ωmax表示最大读数值,检测出的指针直线夹角为θ,所指示的读数为ωθ。则根据线性比例关系可求出仪表读数下列公式所示。

应用上述读数识别方法分别完成了普通压力表、WSS仪表、不锈钢压力表三类共计20幅机械指针式仪表图像的处理及读数识别实验。相对误差的平均值分别为2.44%、1.76%及1.65%,总体平均相对误差为1.93%。
3 总结
本文以生产实际中广泛使用的机械指针式仪表为研究对象,为获取仪表指示值,提出了一系列的图像处理方法,包括图像预处理、表盘区域分割及特征提取方法、仪表中心确定、量程识别及读数识别的分析计算等。在大量图像处理实验的基础上,进行了误差分析及计算。其中,利用形态学原理对图像主要素进行了细化处理,应用Hough变换法实现了对主要素,指针方位的检测及识别;最后,通过剪影法确定了仪表中心,完成了仪表读数识别。
实验结果表明:应用所提出的机械指针式仪表读数识别方法具有良好的正确识别率,与仪表示值相比较,平均识别正确率达到98.07%。
猜你喜欢
青海草业(2022年2期)2022-07-23
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
计算机应用(2021年4期)2021-04-20
石油化工自动化(2018年5期)2018-11-14
中国公路(2017年19期)2018-01-23
中国公路(2017年15期)2017-10-16
中国公路(2017年9期)2017-07-25
中国公路(2017年7期)2017-07-24
通信电源技术(2016年1期)2016-04-16
