
一类非线性级联系统层次化执行器故障诊断方法研究
2021-07-06 05:16张梅李泽滔DAHHOUBoutaied
贵州大学学报(自然科学版) 2021年3期
张梅 李泽滔 DAHHOU Boutaied

摘 要:研究了一类非线性级联系统中执行器内部参数与全局系统运行的相关性问题,利用系统全局可测信息隔离故障执行器并识别执行器内部故障参数。应用可逆理论及基于模型的故障诊断方法,形成了一种系统级与设备级相结合的互联系统层次化执行器故障诊断方案。通过将执行器视为独立子系统与过程子系统互连,构成互连非线性动态系统;并进行互连系统的可逆性、局部参数的全局可观性和故障可诊断性等研究;在全局系统性能下降时能快速准确定位出局部故障参数,实现设备的鲁棒故障诊断。并利用集成换热器模型验证了所提出方案的有效性及鲁棒性。
关键词:级联系统;故障诊断;可逆性;执行器;可观测性
中图分类号:TP273
文献标志码:A
随着控制系统规模化、集成化和智能化发展,系统通常是由若干设备协同运行的复杂互联耦合系统,系统动态特性日趋复杂,故障的发生不可避免;任一系统设备元件出现故障而又未能及时发现,其结果不仅会导致设备损坏,还可能造成全局系统性能下降及非正常停运,甚至是灾难性后果。因此,为保障系统的可靠性和安全性,迫切需要对全局系统及各个设备的实时性能和运行状态进行监测、评估和故障诊断,从而采取有效措施,保证系统及设备的稳定运行[1-5]。
在故障诊断的研究中,执行器故障诊断吸引了工业界和學术界学者的广泛关注。针对执行器故障诊断问题,国内外学者从3个方面进行了研究。一类是系统级故障诊断方法,旨在从全局系统角度检测故障并隔离出故障执行器,而忽略执行器内部动态特性,不针对引起现场设备故障的内部参数[2-16]。一类重要方法是基于残差生成理论的方法[2-10]。残差定义为测量值与其估计值之间的差异,当残差超过其阈值时,故障被诊断并隔离,常见残差生成方法有:高增益观测器[3],自适应观测器[9],区间法[10]等。另一种方法是故障估计或故障重构方法[11-16],这类方法可确定故障的大小、位置及其动态过程。常见故障重构的方法:滑模观测器[12],未知输入观测器[14],输入重构法[15]等。然而,由于对设备内部变量的不完全识别,系统级方法不能定位执行器内部的故障点,使得维护人员根据故障提示往往找不到故障原因,无法及时消除故障。
另一类是设备级故障诊断方法,旨在分析特定执行器的内部动态特性,识别引起执行器故障的内部参数[17-22]。一类广泛深入的研究是基于数据驱动的方法[17-19],如神经网络,支持向量机,小波分析,谱分析等。如文[19]将FFT与数据驱动的方法进行结合, 研究不同位置IGBT的开路故障;另一类研究的方法则是基于模型的故障诊断技术[20-22]。如文[1]中讨论了高速列车牵引系统中的牵引电机等重要部件和单元的故障诊断技术。文献[22]中利用滑模观测器对气动执行机构进行故障诊断研究。然而,设备级故障诊断仅监测设备本身,缺乏对全局系统的动态信息的监督,而设备内部故障会产生连锁反应,影响全局系统的最终输出。
此外,也有少数系统级和设备级相结合的层次化故障诊断方法研究,旨在关注故障在系统各层级的传播分析,及子系统参数故障对系统终端的影响[23-26]。如文献[24]中从高速列车牵引系统关键部件到整车,展开故障诊断、容错控制与故障预测研究的综述。文献[25]探讨了从全局余热锅炉接近点层面研究对汽包液位控制阀的破坏作用。文献[1]中也提到未来的研究方向是整体系统与各设备子系统结合。
基于上述认识,本文提出了一种能够解决非线性系统故障诊断的层次化故障诊断方法。利用全局系统提供的可测信息,识别执行器内部故障参数,改善故障定位并提供更好的预测维护帮助。该方法强调了现场设备动态特性的重要性,更具有故障针对性。
1 问题描述
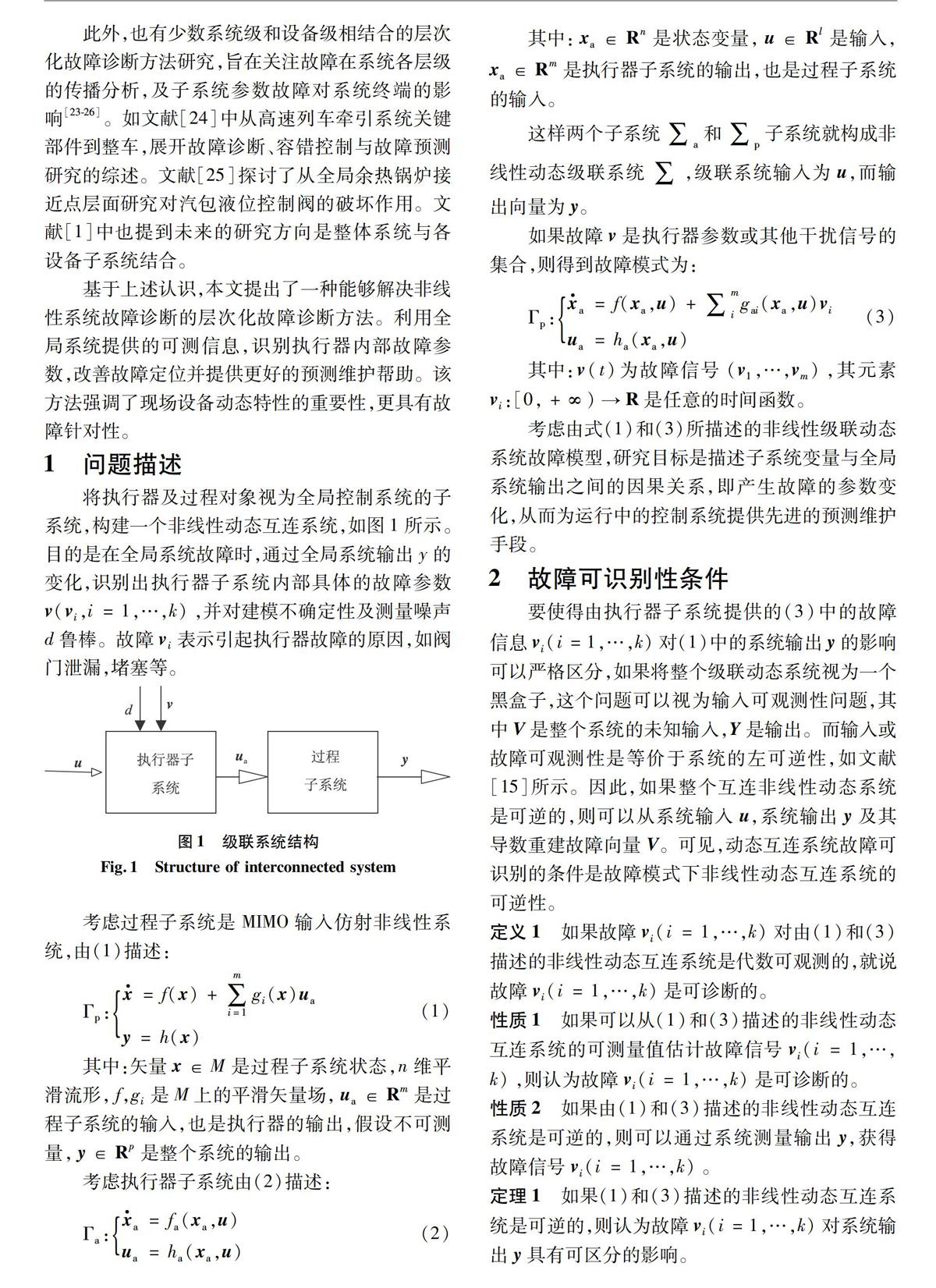
将执行器及过程对象视为全局控制系统的子系统,构建一个非线性动态互连系统,如图1所示。目的是在全局系统故障时,通过全局系统输出y的变化,识别出执行器子系统内部具体的故障参数v(vi,i=1,…,k),并对建模不确定性及测量噪声d鲁棒。故障vi表示引起执行器故障的原因,如阀门泄漏,堵塞等。
5.3 仿真结果及分析
本仿真实例的数据来自一个实验用逆流式换热反应器。如文[26]所示,此实验用换热反应器由法国图卢兹LGC 实验室设计制造,它由3块反应板和5块冷却板以三明治结构组合在一起,如图3所示。
仿真目的是验证所开发的系统监督及故障诊断策略的有效性。仿真操作条件如下:冷却流体流速Fu参考值为4.22e-5 m3/s, 过程流体流速Fp参考值为4.22e-6 m3/s。观测器初始条件0。执行器子系统参数值:m=2 kg,Aa=0.029 m2,μ=1 500 N·s/m,k=6 089 N/m 冷却流体阀Pc为1 MPa,过程流体阀为1.2 MPa,冷却流体阀差压 ΔP为 0.6 MPa,过程流体阀60 kPa。
图4为在无故障情况下两流体流速的估计值,黑色实线为理想计算值,绿色点化虚线为互连观测器的估计值,红色虚线为系统逆方法的重构值。从图4可见,在理想情况下,3个估计值收敛重合。
实际生产中执行器故障通常由单参数故障引起。因此,考虑每个执行器只有一个故障,则执行器子系统中可能会同时发生两个故障。为了说明所提出的方案的鲁棒性,考虑外部干扰或测量噪声,假设输出测量值y被有色噪声破坏,有色噪声由具有零均值和单位方差的高斯白噪声激发的二阶AR滤波器产生,标准偏差约为3.5。
每个执行器分别考虑一个故障。对过程流体执行器,考虑参数k1发生了故障,产生此故障的原因可能是泄漏。对冷却流体执行器则考虑参数pc2发生了故障,引起故障的原因可能是阀门堵塞,也是控制阀中最常见的故障。如果没有妥善维修,这种故障可能会对系统性能造成严重影响。图5—6给出了仿真结果。
从图5可见,虽然存在噪声,但是开发的输入重构技术仍然可以提供具有良好精度的重构输入。在过程流体执行器中,重构的流体流速在60 s时突然下降并花费4 s达到新的稳态,由于参考流速为定值,因此流速的突然下降表明有故障发生。对于冷却流体执行器,重构的流速值在60 s时开始增加,且经过3 s后达到新平衡。此意外的增长也意味着故障的发生。应该注意到,虽然Fp,Fu在观测器中初始轨迹不同,他们最终都收敛到各自的“真值”。
從图6得到,故障检测残差r1表示过程流体执行器的故障。r1在60 s时产生突变且值大于其阈值,也就是检测到故障的发生。故障检测残差r2对应的是过程流体执行器的故障检测,因此r2在40 s的突变表征了过程流体执行器故障。可以通过增大观测器增益或者减小阈值的方式来缩短故障的检测时间,但是大增益和小阈值有可能造成故障的不能正确检测,因为大增益的观测器对噪声会很敏感,而小阈值可能与噪声无法分开而造成误判。因此,为了能正确检测故障,需要在故障可检测性与灵敏性间做平衡选择。在存在噪声的情况下可能无法检测到小幅度故障。在检测到故障之后,下一步就是确定产生故障的根本原因。
图7—8给出了故障根本原因残差RCA,s11,s12,s13,s14分别对应过程流体执行器可能的参数故障μ1,k1,pc1,ΔP1;同理,s21,s22,s23,s24分别对应过程流体执行器可能的参数故障μ2,k2,pc2,ΔP2。
从图7可见,在60 s时,所有RCA残差都开始变化并超过其阈值,但只有RCA残差s12超过其阈值且保持不变,其余的RCA 残差都在一段时间后小于其各自的阈值,因此产生过程流体执行器故障的原因,即参数k1就被隔离出来了。对于冷却流体执行器的故障而言,从图8可见,从40 s开始,RCA残差开始变化,只有RCA残差s23大于其阈值并保持在阈值之上,这就意味着产生此执行器故障的原因是故障源pc2引起的。
从上述仿真结果可以看出,提出的策略可以正确检测和定位故障,并且以准确的精度实现了每个检测故障的根本原因分析。由于所提出的方案的鲁棒性能,获得了令人鼓舞的仿真结果。
6 总结
本文研究了一类非线性动态互连系统的故障诊断和故障根本原因分析的问题。通过在RCA滤波器中使用全局系统的输出来估计本地子系统的输出,将本地故障参数识别能力与全局系统监控能力有机结合起来。另外,还研究了故障的可诊断性条件。仿真结果验证了所提出设计方法的有效性和鲁棒性。
参考文献:
[1]姜斌,吴云凯,陆宁云,等.高速列车牵引系统故障诊断与预测技术综述[J]. 控制与决策,2018,33(5):841-855.
[2] 周东华,纪洪泉,何潇.高速列车信息控制系统的故障诊断技术[J]. 自动化学报,2018,44(7):1153-1164.
[3] HAN H, YANG Y, LI L, et al.Observer-based fault detection for uncertain nonlinear systems[J].J. Franklin Inst.,2018(355):1278-1295.
[4] CHAO S, GAO Z, MOAN T.Model-based fault detection, fault isolation and fault-tolerant control of a blade pitch system in floating wind turbines[J]. Renew Energy, 2018, 120:306-321.
[5] CHEN Z W, DING S X, PENG T,et al.Fault detection for non-gaussian processes using generalized canonical correlation analysis and randomized algorithms[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2):1559-1567.
[6] JIANG B, GAO Z, SHI P, et al. Adaptive fault-tolerant tracking control of near-space vehicle using Takagi Sugeno fuzzy models[J].IEEE Trans. Fuzzy Syst., 2010(18):1000-1007.
[7] XU A, ZHANG Q. Nonlinear system fault diagnosis based on adaptive estimation[J]. Automatica, 2004,40:1181-1193.
[8] FRAGKOULIS D, ROUX G, DAHHOU B.Detection, isolation and identification of multiple actuator and sensor faults in nonlinear dynamic systems: application to a waste water treatment process[J]. Appl. Math. Model., 2011, 35 (1): 522-543.
[9] ZHANG Q. A new residual generation and evaluation method for detection and isolation of faults in non-linear systems[J]. Int. J. Adapt. Control Signal Process, 2000, 14: 759-773.
[10]LI Z, DAHHOU B. A new fault isolation and identification method for nonlinear dynamic systems: application to a fermentation process[J]. Applied Mathematical Modelling,2008 (32):2806-2830.
[11]李辉, 赵猛. 双馈风电机组关键传感器的故障诊断方法[J]. 中国电机工程学报, 2011,31(6):73-78.
[12]EDWARDS C, SPURGEON S K, PATTON R J, Sliding mode observers for fault detection and isolation[J]. Automatica, 2000, 36(4):541-553.
[13]YAN X G, EDWARDS C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer[J]. Automatica, 2007, 43(9):1605-1614.
[14]MA Z H, WANG S P, SHI J, et al.Fault diagnosis of an intelligent hydraulic pump based on a nonlinear unknown input observer[J]. Chinese Journal of Aeronautics, 2018,31(2):385-394.
[15]SZIGETI F.System inversion and fault detection: the failure affine nonlinear case[J]. Automatica, 2002, 20(4):10-14.
[16]MARTINEZ GUERRA R, MATA MACHUCA J L, RINCON PASAYE J J.Fault diagnosis viewed as a left invertibility problem[J]. ISA Trans., 2013,52(5):652-661.
[17]SHARIFI S, TIVAY A, REZAEI S M, et al. Leakage fault detection in Electro-Hydraulic Servo Systems using a nonlinear representation learning approach[J]. ISA Trans., 2018,73:154-164.
[18]SUBBARAJ P, KANNAPIRAN B. Fault detection and diagnosis of pneumatic valve using Adaptive Neuro-Fuzzy Inference System approach[J]. Appl. Soft Comput. J., 2014,19:362-371.
[19]YANG J, GUO Y Q, ZHAO W L.Long short-term memory neural network based fault detection and isolation for electro-mechanical actuators[J]. Neurocomputing,2019 (360):85-96.
[20]BARTYS M, PATTON R, SYFERT M,et al.Introduction to the DAMADICS actuator FDI benchmark study[J]. Control Eng. Pract., 2006,14:577-596.
[21]GORD M, KHOSHNAZAR H. Valve fault detection for single-stage reciprocating compressors[J]. J. of N. Gas Sci. and Eng., 2016,35:1239-1248.
[22]AYADI A, HAJJI S, SMAOUI M, et al.Dynamic high-gain observer to estimate pneumatic actuator temperatures[J]. J. Dyn. Sys., Meas., Control,2015,138(2):245-253.
[23]馬萍,张宏立,范文慧.基于局部与全局结构保持算法的滚动轴承故障诊断[J].机械工程学报,2017,53(2):20-25.
[24]张康康. 基于滑模技术故障诊断和容错控制及应用于高速列车的研究[D].南京: 南京航空航天大学,2018.
[25]MA L, DONG J, PENG K,et al.A novel data-based quality-related fault diagnosis scheme for fault detection and root cause diagnosis with application to hot strip mill process[J]. Control Eng. Pract., 2017(67):43-51.
[26]ZHANG M, WU Q, CHEN X P,et al.Observer design for nonlinear invertible system from the view of both local and global levels[J]. Appl. Sci.,2020,10:7966.
(责任编辑:曾 晶)
Multi-level Actuator Fault Diagnosis of Nonlinear Interconnected System
ZHANG Mei1,LI Zetao*1,DAHHOU Boutaied2
(1.School of Electrical Engineering, Guizhou University,Guiyang 550025, China;2.LAAS-CNRS,University Paul Sabatier,Toulouse F340100, France)
Abstract:
The problem of the correlation between the internal parameters of the actuator and the global operation of a class of nonlinear interconnected systems is studied. The global measurable information of the system is used to isolate the fault actuators and identify the internal fault parameters of the actuator. Based on the inverse reversible theory and model based fault diagnosis method, a multi-level fault diagnosis scheme of interconnected system combining system level and device level is presented. By considering the actuator as individual dynamic subsystem connected with process dynamic subsystem in cascade, an interconnected nonlinear system is constituted. The invertibility, global observability of local parameters and fault diagnosability of interconnected systems are studied. When the global system performance declines, the local fault parameters can be located quickly and accurately, thus the robust fault diagnosis of device can be achieved. The effectiveness and robustness of the proposed scheme are verified by the intensified heat exchanger model.
Key words:
interconnected system; fault diagnosis; invertibility; actuator; observability
收稿日期:2021-03-04
基金項目:国家自然科学基金资助项目(62003106);贵州省重点实验室建设资助项目 (黔科合平台人才[2016]5103);贵州省科学技术基金资助项目(黔科合基础-ZK[2021]一般321);贵州大学引进人才资助项目([2018]02)
作者简介:张 梅(1981—),女,副教授,博士,研究方向:故障诊断与容错控制及其应用等,E-mail:mzhang3@gzu.edu.cn.
通讯作者:李泽滔,E-mail:ztli@gzu.edu.cn.
猜你喜欢
今日自动化(2022年1期)2022-03-07
科技风(2021年10期)2021-04-18
装备维修技术(2021年45期)2021-03-03
科学与财富(2020年3期)2020-04-02
科学导报·科学工程与电力(2019年44期)2019-09-10
科学导报·学术(2019年14期)2019-09-10
振动工程学报(2019年2期)2019-05-13
科技与创新(2014年9期)2014-08-02
中国高新技术企业·综合版(2013年7期)2013-08-13
现代电子技术(2009年15期)2009-09-30
