
基于改进电导增量法的光伏MPPT策略研究
2021-07-06 16:44魏立明吴扬昀
电源技术 2021年6期
魏立明,吴扬昀
(吉林建筑大学电气与计算机学院,吉林长春 130118)
近年来,随着传统能源消耗日益加剧、环境污染问题越来越严峻,可再生能源的开发和利用已成必然趋势。太阳能作为一种可持续发展的清洁能源,具有相对的广泛性、资源的充足性以及潜在的经济性等优点,在未来的能源战略中居于优先的地位,因此太阳能发电成为新能源发电领域中的研究热点[1]。但目前光伏电池易受光强、温度等外界因素影响,无法持续稳定工作在最大功率点处,导致发电效率仍普遍低下,因此最大功率点跟踪技术的引入显得尤为重要。为了提高最大功率点跟踪效率,不少学者提出了相关的MPPT 算法。
文献[2]提出一种牛顿插值法结合扰动观察法的复合控制方法,即先通过大步长扰动观察法快速追踪到MPP 点附近,再利用牛顿插值法进行抛物线拟合直接计算出当前峰值电压值,该方法有效克服了传统扰动观察法跟踪速度和稳定性难以兼顾的问题。文献[3]提出一种预测模型与扰动观察法相结合的控制策略,通过建立系统目标函数,即可预测出下一刻P-U曲线的走向,当外界环境处于复杂的变化状况时能有效提高MPP 点的跟踪速度和精度。文献[4]对传统滑模控制法进行改进,其原理为根据Boost 电路平均状态方程设计相应的滑模控制器,并使用微滑模面取代常规的滑模面,有效减小了MPPT 系统的稳态振荡率。文献[5]提出了一种双闭环控制的改进型爬山法,并结合了PI 控制策略,相较于传统爬山法,该算法表现出更佳的抗干扰性及控制精度。本文以电导增量法为研究对象,在传统变步长电导增量法的基础上提出了一种改进型的变步长电导增量法,通过Simulink建模仿真测试可以得出:改进型的变步长电导增量法在进行最大功率点追踪时,具有更快的响应速度、更高的稳定性,且在外界环境变化时具有更强的应变能力。
1 MPPT 控制原理
在光伏发电系统中,MPPT 的功能是通过Boost 升压电路实现的。图1 为具体的Boost 升压电路结构图。如图所示,MPPT 算法集成器通过采集光伏电池的输出电压和输出电流,将两路信号作为输入端输入到集成器内部进行运算,其输出的调制波与载波在PWM 脉冲调制器内进行比较,从而生成PWM 脉冲序列。同时,PWM 脉冲序列转换成占空比信号D对开关管进行控制,实现Boost 电路等效负载与光伏电池内阻阻值相等,达到最大功率点跟踪的目的[6-7]。
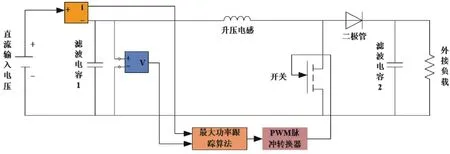
图1 Boost升压电路结构
假设外负载阻值为R,外负载两端电压为U,流过外负载的电流为I,则升压电路的等效负载阻值R'可以表示为[8]:

由式(1)可以得出,通过调整占空比D的大小,即可改变等效负载使其与最佳输出负载相匹配,从而控制光伏阵列保持在最优输出状态。
2 传统变步长电导增量法
变步长电导增量法由于控制精度高且对于外界环境变化具有较强的适应能力,因此被广泛应用于光伏系统最大功率点跟踪,其基本原理是通过实时计算光伏电池输出电压以及电流值,求出其输出电导的相反数和瞬时电导值并对二者进行比较,来判断当前工作点所处的位置,并以光伏P-U斜率作为步长参考因子调整输出电压,式(2)为光伏电池输出功率对电压求导的展开式:

如式(2)所示,当I+U(dI/dU)>0,即dI/dU>-I/U时,工作点位于MPP 点左侧,应从正方向扰动输出电压,当I+U(dI/dU)<0,即dI/dU<-I/U时,工作点位于MPP 点右侧,应从负方向扰动输出电压。当I+U(dI/dU)=0,即dI/dU=-I/U时,工作点刚好位于MPP 点,此时光伏电池处于最大功率状态[9]。式(3)为变步长电导增量法的步长公式,式(4)为输出电压更新公式:
3 改进型变步长电导增量法
3.1 算法原理
传统变步长电导增量法在追踪最大功率点过程中,始终以P-U斜率作为电压步长调整输出电压,因此在实际应用中仍存在功率波动大、响应时间长等问题。为此,文中提出一种改进的变步长电导增量法,其原理是依据光伏P-U曲线的非对称性,同时结合指数函数、对数函数曲线的变化特点,对最大功率点左右两侧分别采用不同的电压步长调整策略,弥补了传统变步长电导增量法中存在的缺陷,从而实现更好的跟踪效果。
一般地,光伏电池P-U曲线表现为单极值的非对称性曲线,左侧曲线部分较为平缓,右侧曲线部分较为陡峭,具体的曲线图可由图2 表示。通过进一步分析图2 可以得出:当输出电压为0 时,dP/dU为正数且绝对值较小,在最大功率点电压左侧的电压区间内,dP/dU由初始值逐渐递减为0,且递减速度较慢。当输出电压为开路电压时,dP/dU为负数且绝对值较大,在最大功率点电压右侧的电压区间内,dP/dU由0 继续递减,且递减速度较快[10-11]。

图2 光伏电池P-U曲线
基于以上dP/dU值的变化规律,本文结合了对数函数ln(x+1)在(0,+∞)内的变化特点,以及指数函数exp(x)-1 在(-∞,0)内的变化特点,将其运用到最大功率点跟踪步长调整策略中对传统算法进行优化。当P-U斜率dP/dU>0 时,以ln[(dP/dU)+1]作为步长参考因子调整输出电压,当P-U斜率dP/dU<0 时,以exp(dP/dU)-1 作为步长参考因子调整输出电压。图3 中将改进型变步长电导增量法和传统变步长电导增量法进行对比,分别展示了两者步长值与斜率的函数关系。
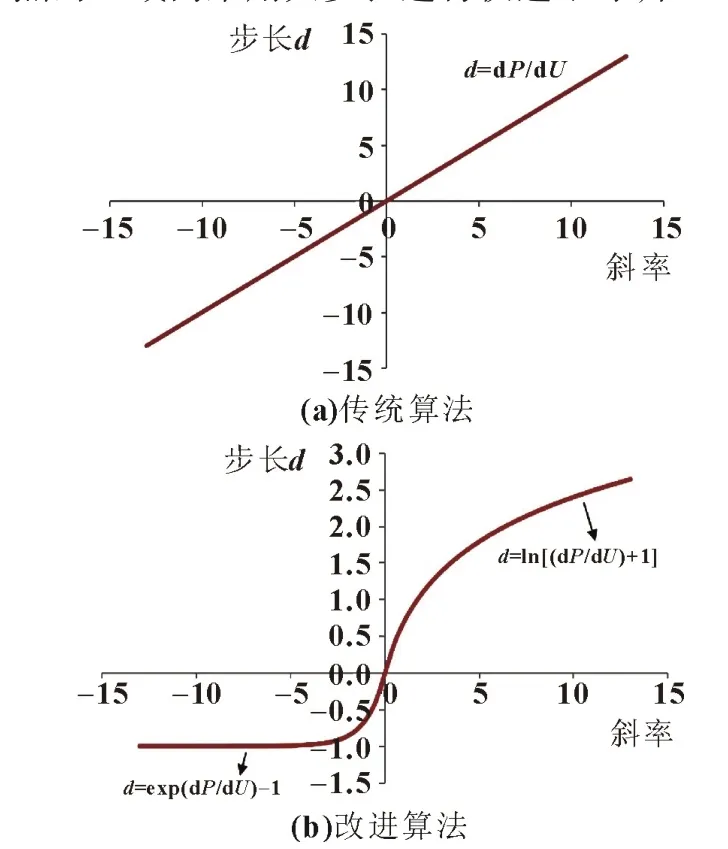
图3 两种算法步长d效果对比
由图3 分析可知,传统算法虽能在P-U曲线坡度较陡、远离MPP 点的区域内采用大步长进行快速跟踪,在P-U曲线坡度较缓、靠近MPP 点的区域内采用小步长跟踪提高了局部搜索精度,但没有充分考虑到P-U曲线的非对称性。而改进算法既保留了传统算法的优点,也可实现当工作点位于最大功率点电压左侧,即范围宽广的电压区间内时,使用较大步长进行追踪,当工作点位于最大功率点电压右侧,即范围狭小的电压区间内时,使用较小步长进行追踪,从而达到更好的跟踪效果。图4为改进型变步长电导增量法具体的算法模型。

图4 改进算法模型
如图4所示,该模型中两个输入端分别为光伏电池的输出电流和输出电压,输出端为电压步长值,可用于调整光伏电池工作电压不断靠近最大功率点电压,从而实现最大功率点跟踪。该模型在功能上可分为三部分:第一部分,检测光伏电池输出电压瞬时变化量dU值是否为0,Swich模块可根据结果切换成合适的步长调整模式。第二部分,当dU值为0时,以固定步长值0.07 V 调整输出电压,并通过Sign 模块判断输出电流瞬时变化量dI值的正负以确定调整方向。第三部分,当dU值不为0 时,在此基础上利用Swich 模块判断I+U(dI/dU)值的正负,以确定当前工作点和最大功率点的关系并选择对应的步长策略调整输出电压:当光伏P-U斜率大于0 时,定义步长公式为k1ln[(dI/dU)+1],当光伏P-U斜率小于0 时,定义步长公式为k2[exp(dI/dU)-1],其中,k1、k2分别为MPP 点左右两侧的初始步长值。由图2 分析可知,k1、k2之间的比值满足式(5):

式中:Um、Uoc分别为最大功率点电压和开路电压。根据恒压系数法可知,Um、Uoc之间的函数关系可由式(6)表示[12]:

因此,式(5)可表示为:

一般地,x为常量,取值范围为[0.7,0.8],文中设x值为0.75,可得k1=3k2。因此当工作点位于最大功率点左侧时,初始步长值k1=3ΔU;当工作点位于最大功率点右侧时,初始步长值k2=ΔU。
3.2 功率修正法
当外界温度θ、光照强度S不变时,光伏P-U曲线形状不会发生改变,而当θ、S发生变化时,P-U曲线的曲率、上坡段斜率、下坡段斜率以及峰值电压点、开路电压点的位置均会改变[13-14],因此在利用电导增量法追踪最大功率点的过程中,往往会出现功率采样速度不及外界环境变化速度的现象,从而导致下一次的步长误判,具体的误判过程可由图5 表示。
如图5 所示,当电压U=U1时,功率P=P1;当U=U2时,由于温度θ、光强S发生突变,导致系统采样功率P=P2,因而在实际步长计算公式d=f(dP/dU)中,dP的值等于(P2-P1)而非(P2-P3),使得下一次步长值出现误差。基于上述不足,文中提出功率修正法对dP的值进行校正,确保在外界环境变化时能够有效提高最大功率点跟踪控制精度。
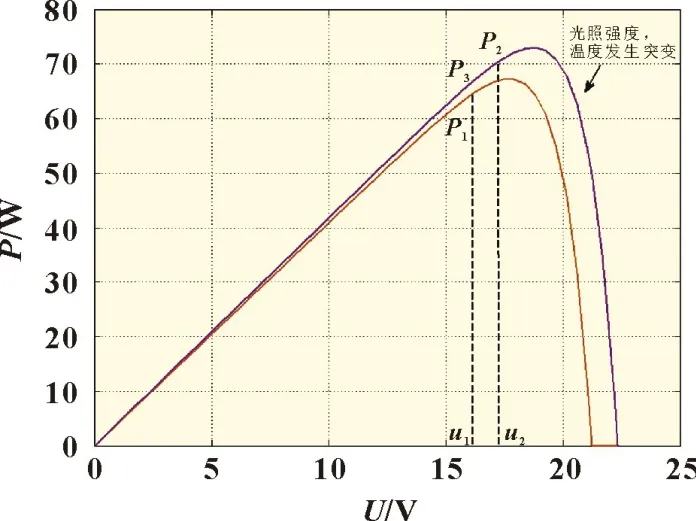
图5 外界环境突变时的光伏P-U曲线
在标准状况(S=1 000 W/m2,θ=25 ℃)下,光伏电池的输出功率可由短路电流Isc,开路电压Voc,最佳工作电压Vm,最佳工作电流Im表示,具体表达公式为:
在实际情况下,光照强度S、温度θ与标准状况下的参数存在偏差,偏差值Δθ、ΔS可由以下公式表示:
当标准状况下的光强、温度发生变化时,新状态下的光伏电池参数值Isc_new、Im_new、Uoc_new、Um_new可由以下公式表示:
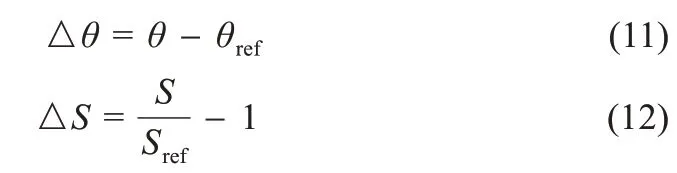
式中:a、b、c分别取值为0.025、0.5、0.002 88,基于式(8)~(16),可得实际情况下的光伏电池输出功率表达式为:

假设U=U(k―1)时,P=P*,则dP与dU值可分别表示为:

文中采用功率修正法与改进型变步长电导增量法的步长公式相结合,可以避免外界环境变化时步长值出现误差,进而减小了MPP 点左右两侧的步长振荡,提高了最大功率点跟踪速度及稳定性。图6所示为功率修正法具体的算法模型。
图6 功率修正法模型
4 仿真分析
本文在MATLAB/Simulink 里搭建Boost 升压电路模型如图7 所示。该电路模型中包含光伏电池封装模块、MPPT 算法模块、PWM 脉冲信号转换器、MOSFET 管、升压电感L、滤波电容C 以及外接负载R 等。其中,升压电感的充放电过程是由PWM 信号控制开关管的通断实现的,一般光伏电池输出的平均电流等于流入电感的平均电流,根据输入输出能量守恒原理,同时在对元器件留有裕量的前提下,文中设计电感L为11 µH;滤波电容主要作用为储存能量使电压维持稳定,因此在设计电容器参数时需考虑控制输出电压纹波在允许范围内,此次设计中令输出电压纹波小于1%,得滤波电容C1为300 µF、滤波电容C2为100 µF。本文设定PWM 波频率为30 kHz,由于MOSFET 管主要适用于高频低压领域,其特性与文中设计的PWM 波频率要求相符,因此在该电路模型中选用MOSFET 管作为开关管,具体型号为IRF640。此外,该仿真模型中设置外接负载阻值为50 Ω,初始环境参数为光强1 000 W/m2,温度25 ℃(标准状况),文中选用的光伏电池在标况下最大功率为70 W。表1 所示为光伏电池和Boost 电路的相关参数。
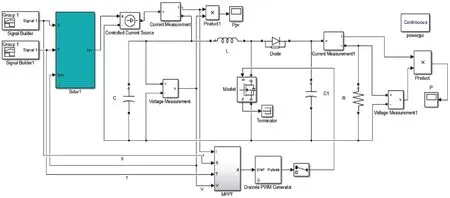
图7 Boost升压电路仿真模型

表1 光伏电池及其控制系统相关参数
在完成光伏电池以及Boost 电路相关参数的设置后,再对仿真方式进行设计:文中选择仿真解算器类型为变步长ode45,设最大步长以及最小步长调节方式为自动模式,并设置仿真时间为0.1 s,在光强为1 000 W/m2、温度为25 ℃的外界条件下对变步长电导增量法、改进型变步长电导增量法进行MPPT 仿真,得到两个算法的功率跟踪波形图如图8 所示。
由图8 分析可知,变步长电导增量法大约在第0.04 s 时追踪到最大功率点,且在临近最大功率点时存在剧烈的功率波动,降低了系统的稳定性。而改进型变步长电导增量法在追踪过程中不仅没有明显的功率振荡现象,且能以较高的速率追踪到最大功率点,其追踪过程用时不到0.03 s。
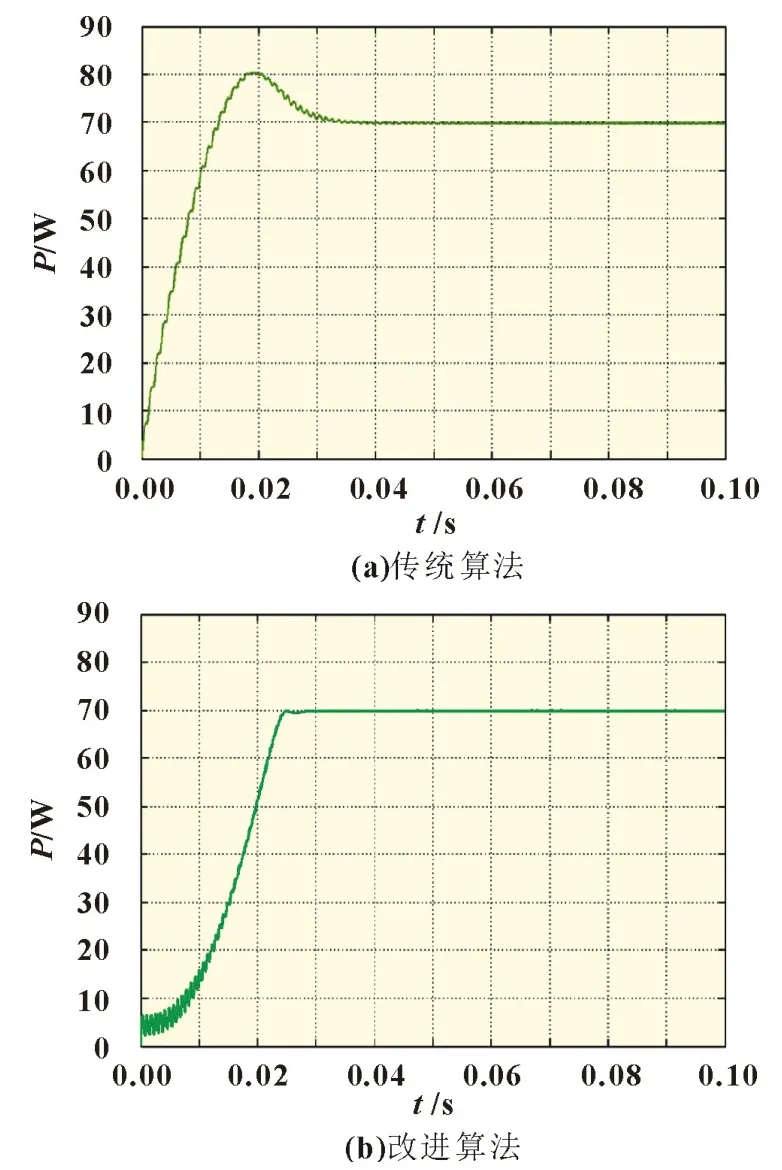
图8 两种算法仿真跟踪波形对比
文中设第0.06 s 时光强由1 000 W/m2降为900 W/m2,温度由25 ℃降为15 ℃,并对传统变步长电导增量法、改进型变步长电导增量法在外界环境变化下的应变能力进行了仿真测试,得到两个算法的仿真曲线对比如图9 所示。由图9 分析可知,当外界环境突变时,改进型变步长电导增量法相较于传统变步长电导增量法,在重新寻找最大功率点的过程中反应速度更快且功率振荡更小,具有更优良的应变能力。


图9 两种算法应变能力对比
5 结论
基于光伏P-U斜率在电压区间内的变化规律,本文将对数函数和指数函数运用到传统变步长电导增量法的步长调整策略中,提出了一种新型的变步长电导增量法,并利用功率修正法对所提算法步长公式中的功率差值进行校正。通过该方法与传统变步长电导增量法的MPPT 仿真对比可以得出:新算法避免了传统变步长电导增量法追踪速度不高的问题,且能控制系统准确地跟踪到最大功率点,并使系统在稳态时保持较小的功率波动。同时,新算法在外界环境变化时,也能够更快更稳地找到新的最大功率点,减小了功率损失。基于文中提议的算法,光伏发电系统结构得以优化,光伏阵列的能量转换效率得到了有效的提升。
猜你喜欢
当代陕西(2022年6期)2022-04-19
一重技术(2021年5期)2022-01-18
中学生数理化·中考版(2019年9期)2019-11-25
测控技术(2018年4期)2018-11-25
电子制作(2018年14期)2018-08-21
电信科学(2016年9期)2016-06-15
电测与仪表(2016年20期)2016-04-11
西南医科大学学报(2016年4期)2016-01-03
电机与控制应用(2015年2期)2015-03-01
电子设计工程(2015年16期)2015-02-27
