
高速铁路接触网智能巡视检测系统
2021-07-06 02:44茹振华孙刚黄佳源赵必武
传感器世界 2021年5期
茹振华 孙刚 黄佳源 赵必武
1.中国铁路青藏集团有限公司拉萨基础设施段,西藏拉萨 850000;
2.中国铁路沈阳局集团公司工电检测所,辽宁沈阳 110000;
3.绵阳师范学院机电工程学院,四川绵阳 621000;
4.四川信达轨道交通设备有限责任公司,四川绵阳 621000
0 前言
自“十三五”以来,中国高速铁路迅猛发展,铁路建设成果显著。预计到2025年,全国高速铁路里程将达到4万公里左右,覆盖超过150个大型城市。高速铁路接触网是顺铁路线相对固定位置上空架设的输电线路,电力牵引机车通过受电弓从接触网取电[1]。其由导线、钢索牵引装置、定点装置、支柱基础设施几部分组成,是高速铁路的重要组成部分。接触网受工作时长、工作环境等多种因素影响,对其标准要求较高,如:在高速运行、高温、极寒、雨雪、大风条件下,能保证接触网张力正和弧垂正常,要求接触网在线路设计结构上具有稳定性和较长的使用寿命。整体设计合理,有足够的耐磨性,便于维护。如有事故发生,有利于快速抢修,迅速恢复电力机车供电。在这种情况下,导线的张力以及相对位置就变得十分重要。导线的张力过大会降低导线的使用寿命,甚至断裂;张力过小会造成弧垂的加大,使线间安全距离变短,易发生打火等事故。当前,我国接触网的检测方法主要采用人工巡检、大型巡检车巡检的办法,此种方法存在运行成本高、干扰铁路调度、危险系数大、实时性差、工作量大等问题。
高速铁路接触网智能巡检系统是一种的多功能、多用途、一体化测量接触网参数的最新产品。设备采用便捷、可视化设计,可在轨道上推行行走,实现自动寻线功能。设备的使用能有效降低铁路巡检人员劳动强度,提升了测量稳定性及工作效率。设备有效改进了现有大型接触网检测车占用行车区间,影响铁路调度运行图等缺点[2]。该产品运用前沿技术,通过无线网络将数据发送到网络服务器上实现数据共享,保证数据的实时性[3]。产品二维激光装置采用了激光无损测量技术,实现对接触网几何参数的实时测量,接触网悬挂的巡视检测。相比于传统接触网检测维护设备,不论白天或夜晚,系统能够对接触网几何参数进行无损非接触测量,对接触网悬挂进行巡视检测,对测量数据进行分析管理及远程传输。系统使用过程中运行稳定,测量数据可靠,拆卸方便。
1 设备系统主体设计
1.1 设备功能
设备主体主要分为3部分:推行结构以及精测平板、导尺支架以及精测激光、雷达及支撑调节装置。设备整体宽度1,500 mm,高度800 mm,杆高度1,200 mm。采用折叠设计,全铝合金材质,重量约为30 kg。设备轻巧便携,简单组装后能够快速进行接触网巡视检测。设备初始状态如图1所示。整体布局后如图2所示。

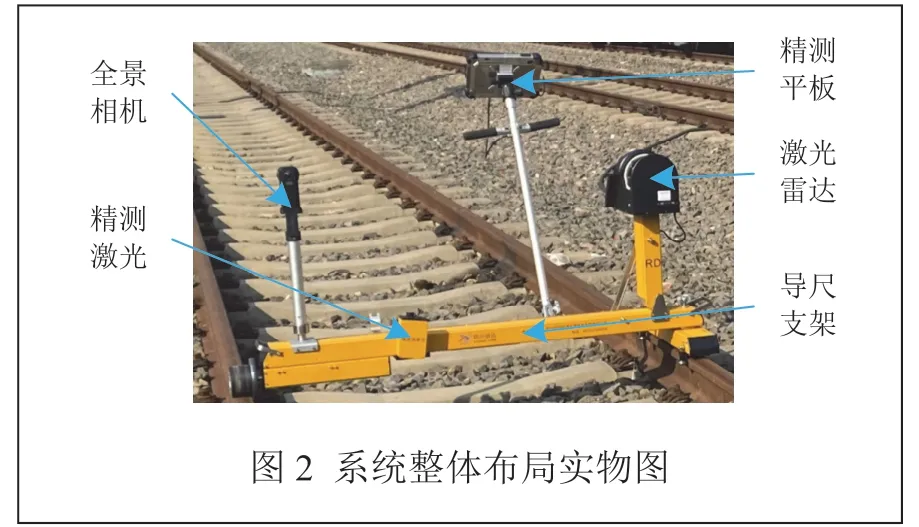
推行结构以及精测平板:主要负责整体设备的推动,以便在铁轨上行进。平板电脑设置在设备整体中心偏左的位置上,减少采集设备到处理设备的线缆距离,加快数据处理速度。推行结构可以调节高度,适应不同身高工作人员的作业,增加设备使用的舒适性,提高工作效率[4]。
导尺支架以及精测激光:主要负责设备在铁轨上的移动以及精测主机的放置。通过实地测量与考察,因系统工作的精度需要,精测主机需放置于一个离地距离较低的地方,使精测主机的仰视角度达到一个合适的范围,以方便精测主机能快速地检测到导线以及钢索牵引装置的位置。
雷达及支撑调节装置:主要负责支撑以及调节雷达位置。因激光传感器选择其扫描主机的主要工作角度在±25°,故需一个调整位置的杆放置雷达,使雷达可以正常工作,达到可检测范围最大化。
全景相机:包含一个可旋转的镜头,摄像头有360°的视场角,确保可以获取铁路周边沿线的全景画面。其独创之处在于成像结合了现实数据和现实场景,该技术也多用于视频场景应用方面。使用者在使用过程或使用完成后,电脑可模拟成像,实现对线路状态的全景成像,实现铁路版街景效果。
1.2 系统硬件电路设计
电源模块基本分为12 V电源板、24/12 V电源板、3.3/1.8 V转换电源板。12 V电源板主要负责核心板底板电机驱动的供电;24/12 V电源板主要负责雷达与主板的供电;3.3/1.8 V转换电源板主要负责降压之后给激光传感器供电。
系统整体电路设计方案主要围绕2个中心来设计,分别为核心板底板电机驱动和数据处理主机。激光传感器通过激光电平转接板(3.3至1.8转换)串口接入核心板底板电机驱动。编码器5 V正交脉冲、进步电机、摄像头直接接入核心板底板电机驱动。核心板电机驱动单片机雷达电路板采集数据(Led/里程/gps/温湿度),数据通过电路板串口到五芯插头处,供电通过12 V电源板转换电池电压供电。
触摸屏电路板、屏幕控制板、雷达分别通过USB、HDMI、网线连接到数据处理主机,2个中心通过五芯插头联结,最终通过平板电脑显示数据。电路板模块连接设计图如图3所示。

1.3 核心主机处理模块
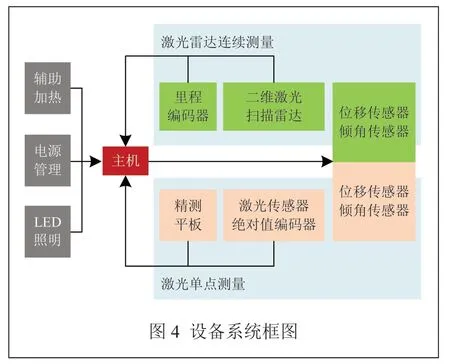
基于Windows平板电脑中以QT为基础的软件系统为整个系统的中心,实现多种数据的处理,如:收集统计里程编码器、二维激光扫描雷达传回的数据、保证各模块的平稳运行。位移传感器、倾角传感器主要由它产生的控制量来控制。设备系统框图如图4所示。
1.4 精测激光+摄像头模块
精测激光+摄像头模块主要运用于定点精准检测。在需要较高精度数据时,云台加摄像头可以保证对目标导线精准定位,将现场实时图像显示到平板电脑上,得到相对位置数据,同时引导激光传感器在电机带动下转向固定角度、固定位置进行数据测量。此辅助模块主要是为了实现对一些雷达模块不能较好测量的特殊数据的采集,提高了设备采集数据的整体精度,且模块采用二维激光装置为激光无损测量技术,提高了接触网维护人员的安全性。精测组成框图如图5所示。

1.5 雷达扫描模块
雷达扫描模块采用电机驱动旋转,由主机控制运动范围及其角度,其工作角度范围在-5°~185°,设置在离地约1 m的杆处,可以有效扩大工作扫描范围,具有利用激光扫描雷达进行实时连续非接触测量,接触线自动瞄准测量的优点。扫描帧率达到每秒1,000次左右,采用超限数据预警:对测量参数进行实时分析,超限参数实时预警,便于及时消除安全隐患。还具有数据回放功能:对于测量数据,以曲线和数据表格2种方式进行回放。其获取的数据可以直接导出为XLS格式输出,对于接触网参数可以进行连续测量,能够对接触网拉出值、导高进行连续非接触测量。
2 实物调试
2.1主要指标参数
智能巡检系统基于目前电气化铁路的指标要求而设计,其中主要包括适用范围、最大功耗、测量精度、导高、拉出值、轨距以及外轨超高,铁路接触网系统需对这些数值进行标准化约束,本系统的测量范围及精度具体如表1所示。

表1 系统主要指标
2.2 扫描设备的调试
2.2.1 测量准备
扫描设备为全自动测量,无硬件控制,直接进行软件操作即可。进入软件首页,界面包括检测曲线、检测数据、基础数据、系统设置、退出5个功能选项。启动软件后,首先确认雷达的数据连接是否成功,连接“成功”雷达旁的灯会亮,“失败”则灰暗,若未连接成功,重启雷达软件,点击“检测曲线”功能。测量界面如图6所示。
制定《黄委施行最严格水资源管理制度实施方案》,进一步明确落实最严格水资源管理制度所需的制度体系、指标准体系、执行体系和技术支撑体系。
右上角“拉出值”和“导高”表示它们的实时数值;“公里标”表示位置;“里程”表示推车行走距离;“侧面限界”旁的数字框表示侧面限界的自动测量数据;“杆号”表示支柱上的数字;“间隔”表示杆号增加/减少的幅度;“智能识别”表示自动识别或者选择用遥控器控制杆号增减;“吊弦”旁的数字选项表示两杆号之间的吊弦根数;“线1”、“线2”、“承1”分别表示左边方框曲线图线的颜色。
在线路简单的路段上,选择一个跨中位置,用精测设备测量一组导高和拉出值,然后点击“开始测量”按钮。
将在精测设备上测试的一组导高、拉出值数据填入相应的数字框内,点击“标定”按钮,听到设备语音提示“标定成功”,则测量前的准备完成,若无语音提示,则标定失败,重新标定一次即可。初始设定完成后,点击“开始测量”按钮即可进行测量,界面会实时显示接触线导高和拉出值、承力索的导高数据波形图。在界面右上方显示导高、拉出值、侧面限界的具体测量值,以及设备测量里程和线路公里标;界面右侧中间显示设备测量时所在的杆号位置并可手动添加杆号;界面右下方可进行开始、停止的测量控制,参数播报可以对当前测得的参数进行声音播放。
2.2.2 检测数据
“检测数据”选项显示被测线路的相关信息和测量数据,在设备工作时会实时持续更新。界面右侧上方是对测量数据的相关操作,可以筛选查看测量数据的部分值;未测量时右侧下方“打开文件”可打开查看历史记录;点击“打开文件”,弹出文件选择框,选择已测的时间点数据,会在此框下显示数据,若在测试时打开此功能,会显示此次测量的数据;若要生成表格文档,则打开相应的时间点数据后,点击数据导出即可。
2.2.3 基础数据
2.3 精测设备的调试
2.3.1 基本测量(导高、拉出值)
进入巡视检测界面后,单击“基本测量”键进入基本测量界面。通过调节按钮或者点击屏幕处导线位置使设备探头瞄准被测接触线或定位点(白天观察屏幕“十”字,夜间按“激光”键发长激光),按“测量”键进行测量。测量完成后,结果会显示在屏幕上。如不需再次测量,可按下其他测量项目按钮进入其他测量界面或退出基本测量界面[6]。
2.3.2 精测校准与数据保存
进入精测系统之后进行校准设置。点击“拉出值与超高校准”按钮,然后选择一个方便识别的接触线上的点,正反两次激光测量这同一个位置即可完成校准。数据采集完成之后点击“导出数据”即可生成表格文件保存在电脑里。导出的表格数据如图7所示,包含了工支、非支、承力索的导高和拉出值的测量数据;里程、杆号代表位置信息;定位点、吊弦为代表测量类型信息,满足了现场对接触网的参数要求。

3 结束语
本文从硬件机械系统设计、实物调试2部分详细介绍了高速铁路接触网智能巡视检测系统的设计方案和器件选择,形成自身的创新。通过在实际测试调试中汲取经验,利用多种思路调试使多模块紧密配合。在机械调整方面,选择合适的材质与传感器,全铝合金整机重量不超过40 kg,方便其反复调试拆装,使设备轻巧便携,简单组装后,能够快速进行接触网巡视检测。选择合适芯片,PCB布线格局合理优化,使其适合铁路环境以及相关气候,让各模块合理有序地工作。在实际调试过程中,通过不同思路的对比,依靠大量的实地数据,优化整个系统的处理速度以及系统整体运行状态,扫描速度控制等,使巡检系统高速的完成既定任务。
猜你喜欢
云南画报(2021年10期)2021-11-24
当代陕西(2020年13期)2020-08-24
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
制造技术与机床(2017年5期)2018-01-19
潍坊学院学报(2016年2期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年4期)2016-05-17
火控雷达技术(2016年3期)2016-02-06
铁路技术创新(2015年3期)2015-12-21
