
综合管廊自动巡检系统研究*
2021-07-06 14:46:28王建郑立宁杜浩然徐凯
特种结构 2021年3期
王建 郑立宁 杜浩然 徐凯
中建地下空间有限公司 成都610053
引言
目前,我国综合管廊通过安装在管廊内的固定式监控设备[1,2],对廊内的各类管线和设备运行情况进行实时监控。然而,固定式监控设备由于机动性差、智能化程度低、投入量大、后期维护费用高等问题,无法满足智慧城市中综合管廊的实际运维需求。因此,管廊重点区域,仍需采用人工巡检的方式,但综合管廊属于地下封闭环境,管廊内空气不流通、采光差、空间压抑等因素,可能存在有毒有害气体集聚,在保障作业人员的生命安全及身心健康方面存在一定的隐患。
管廊巡检机器人[2]通过搭载的高精度传感系统、信息传输系统、智能处理系统等技术手段,构建可视化综合管廊运行环境,感知、传达、分析管廊实时运行状态,不仅能有效补充固定监控检测设备的监测盲区,及时发现综合管廊中管线或各类设备的缺陷或故障,还能代替大量人工巡检工作,保护巡检作业人员的身心健康,有效避免因长期在地下恶劣环境下工作造成设备的漏巡、误巡以及未能及时发现故障等情况的发生。
1 系统功能分析及技术指标
1.1 系统功能分析
由于综合管廊建设在城市地下,长年运行过程中管廊内部存在潮湿、光线昏暗、有害气体泄漏等环境特点。管廊自动巡检系统面对这样的作业环境,需具备以下能力才能完成相应巡检任务[3]:
(1)灵活移动能力:在管廊内完成前进、后退、转向等基本运动,以及完成定点检测、便捷通过管廊隧道中防火区隔断门等任务。
(2)全面感知能力:实时检测管廊内部的管道信息、视频信息、环境参数和机器人自身的状态信息。
(3)实时传输能力:实时将检测到的环境信息与自身状态信息传送到远程监控中心。
(4)长时续航能力:具备具有较长的续航能力。同时,还能实时监测自身电量,并具备自主返回充电桩处进行充电的能力。
(5)自主定位能力:发现异常情况,能及时地报告其地理位置。
1.2 主要技术指标
鉴于综合管廊特殊的环境以及上述实现功能,自动巡检系统主要技术指标见表1。
2 系统设计
综合管廊自动巡检系统由机器人本体硬件系统、机器人附属设备与机器人软件系统三部分组成(图1)。
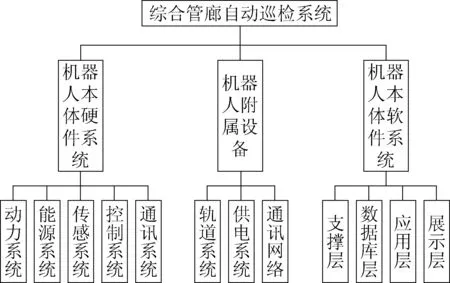
图1 综合管廊自动巡检系统组成Fig.1 Composition of automatic inspection system for utility tunnel
2.1 机器人本体硬件系统
1.动力系统
巡检机器人动力系统主要为机器人提供牵引动力,为保证机器人具有灵活且可靠的移动能力,机器人采用可转向抱轨悬挂系统的驱动轮作为动力输出装置,采用高精度伺服减速轮毂电机作为动力源,能够保证机器人在轨道上运行过程中驱动轮始终与轨道保持充足的摩擦力。
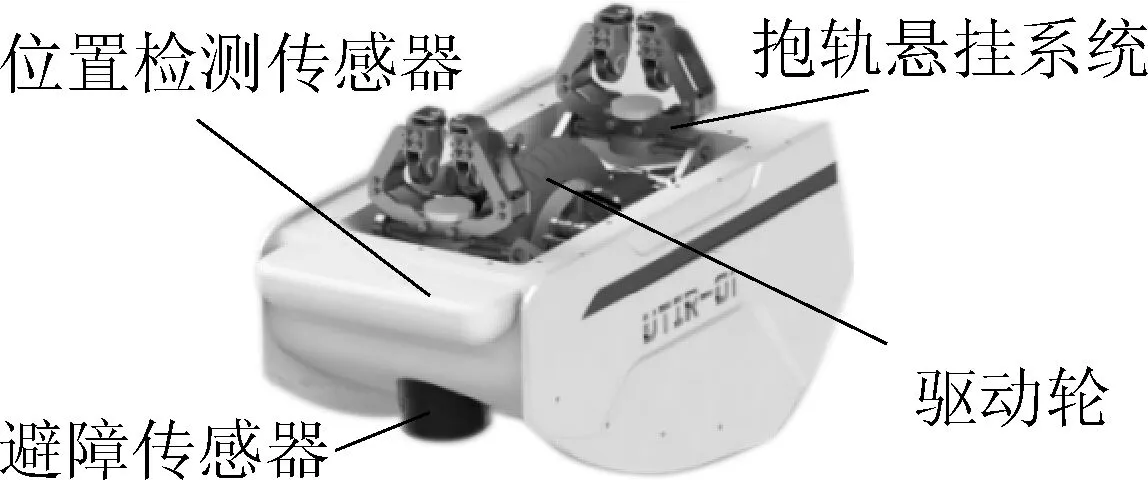
图2 机器人动力系统Fig.2 Robot power system
2.能源系统
巡检机器人执行的所有动作及实现的功能均需要消耗电能,出于安全性和便捷性考虑,管廊巡检机器人不适合使用线缆或滑触线供能[4],由于传感及控制系统中电子元件较多,机器人采用电池作为能源储存介质,使用一次性化学电池或燃料电池不利于后续维护更换,所以最适宜的电池应为可循环充电电池。
3.传感系统
巡检机器人需搭载传感系统对管廊内环境进行检测,传感系统包括氧气传感器、硫化氢传感器、可燃气体传感器、温湿度传感器、可见光摄像机及红外热成像仪等感知外界环境特征的传感器。

图3 机器人能源系统Fig.3 Robot energy system
图4 机器人传感系统Fig.4 Robot sensing systems
4.控制系统
巡检机器人控制核心采用工控机,工控机是专用于工业场景的微型计算机,不仅具有稳定的可靠性,同时具有成熟的底层及操作系统支持,与上位机软件匹配度较高,计算性能强大,可以胜任多路数据的采集与分析处理,适合作为巡检机器人控制系统的中央处理器。

图5 巡检机器人控制系统Fig.5 Robot control system
5.通讯系统
巡检机器人通过本体携带的工业级无线AP与管廊内布设的无线AP同监控中心建立稳定可靠的网络连接。
2.2 机器人附属设备
1.轨道系统
轨道系统由运行轨道、机器通道门、轨道道岔及定位模块组成。各部分轨道需要牢固连接、平滑过渡。机器人通道门可根据指令自动开关,不影响巡检机器人运行且能保证管廊内各区间的相对密封。轨道道岔需根据巡检任务更改各段轨道的连接方式,辅助管廊巡检机器人完成既定巡检任务。管廊巡检机器人通过读取定位模块上的信息对机器人进行位置校准和定位,为提升管廊巡检机器人定位精度,有效完成指定巡检任务提供有力支持。

图6 巡检机器人轨道系统Fig.6 Robot track system
2.供电系统
供电系统通常包括接入配电箱、应急供电电源、机器人充电桩及为自动巡检系统进行供电的供电线缆。其中配电箱中设置了可独立控制的电源开关,应急供电电源可在管廊内部供电状态异常的情况进行紧急供电,保障轨道系统及通信系统的正常运行,不影响管廊巡检机器人执行巡检任务。
3.通讯网络
通信系统采用光纤网络通信,系统主干网络使用冗余环网结构搭建,管廊内每个防火区间至少搭配一台无线基站,保证巡检机器人在执行巡检任务过程中的通讯质量与实效性。无线通讯过程中采用无线接入加密、设备身份认证与数据流加密相结合的多重加密形式,防止数据传输过程中数据被窃取,保障管廊运维的数据安全。
2.3 机器人软件系统
1.软件架构
机器人软件系统架构如图7所示,分为支撑层、数据库层、应用层及系统展示四层。支撑层通过通讯协议获取前端传感设备,感知的综合管廊实时数据,经处理后写入实时数据库和历史数据库[4]。

图7 软件系统架构Fig.7 Software system architecture
数据库层主要包括地图数据库、巡检任务数据、前端硬件设备数据及系统数据等,数据库层实现了巡检数据的统一存储、分析、判断,并向应用层提供决策支持。
应用层包括图像信息识别、巡检任务管理、前端设备管理,实现自动巡检、监控与预警、联动控制等应用功能。
系统展现层向用户提供加直观、易用的界面,方便用户操作。
2.软件主要功能
巡检机器人具有高清图像采集、巡检路径规划、重点部位巡检、自主避障、自主充电及一键返航等功能[5],具体如下:
高清图像采集:巡检机器人搭载有高分辨率可见光摄像头,可实现对管廊内的高清图像采集。
巡检路径规划:巡检路径规划包括识别管廊内标记的轨迹及预设的巡检路径两种方式。巡检机器人可根据路径自动导航,完成巡检任务。
重点部位巡检:在后台地图上可设置重点巡检部位,配置巡检内容,巡检机器人到达设定点后会停下进行详细巡检。巡检过程中,一旦发现异常,巡检机器人将自动将报警信息推送至监控中心。
自主避障:巡检机器人在行驶过程中遇到障碍物可提前停止运动或者避让。移除障碍物后可恢复行走。巡检过程中发现新增障碍物(如:巡检人员、检修工具)同样可以防碰撞和避开。
自主充电:当巡检机器人电量低于设定的阈值后,根据地图,自动前往就近充电点位进行充电,电量达到阈值及以上,巡检机器人则继续开展未完成工作。
一键返航:启动一键返航功能,巡检机器人无论处于何种工作状态均可按照预设的策略返航。
巡检模式控制:对巡检机器人系统提供手动控制和自动控制两种控制方式,并能在两种控制模式间任意切换。手动控制功能可实现对机器人车体、云台、可见光摄像机和红外热像仪的控制操作。自动控制时,系统能够在全自主的模式下,根据预先设定的任务或者由用户临时指定的任务,通过机器人各功能单元的配合实现对设备的检测功能。
硬件设备管理:系统提供显示、存储巡检机器人相关硬件信息的功能,具体包括:机器人驱动模块信息、电源模块信息、自检信息等硬件设备信息。
3 系统识别技术
自动巡检系统在工作过程中,需要根据巡检任务完成对管廊内环境参数的识别、设备运行状态识别等工作内容,针对不同的识别对象,系统采用了以下不同的实现方法:
(1)环境参数识别
自动巡检系统识别的管廊内环境参数主要包括氧气、甲烷、硫化氢、温度、湿度。上述环境参数的检测主要由不同的前端传感器进行采集,然后由后台管理软件根据设定阈值对前端传感器采集的参数进行判断。若相应环境检测参数超过设定阈值则后台管理软件生成报警信息。
(2)红外测温
自动巡检系统搭载有红外热像仪,通过红外热成像技术,对需测温设备进行温度扫描和热成像图片采集。红外图像的识别通过获取能够标记红外图像特征的有用信息,从而提取目标图像,进行设备温度识别、线路短路、温度异常告警[6]。
(3)设备运行状态识别
管廊内控制柜面板指示灯、仪表读数等设备运行状态,采用基于神经网络的图像识别算法[7-9]实现。神经网络的输出长和宽为[300/24]=[18.75]=19,通道为512,即基础网络VGG-16的输出尺寸为512×19×19。在基础网络之后,还有如表2的网络结构。

表2 神经网络结构Tab.2 Neural network architectures
其中,是否输出一栏标为Y的表示均将其输出,然后送到识别器,即最终识别器接受不同大小的特征图谱共(5+1)=6个(5个额外的输出层和1个基础网络输出),分别为10×10、5×5、3×3、1×1和两个19×19。
conv4_3、conv_7、conv8_2、conv7_2、conv8_2、conv9_2、conv10_2、conv11_2这些大小不同的特征图谱,其目的是为了能够准确的检测到不同尺度的物体,因为在低层的特征图谱,感受野比较小,高层的感受野比较大,在不同的特征图谱进行卷积,可以达到多尺度的目的,实现对管廊内不同对象的识别。
4 项目应用情况
为了对自动巡检系统的功能、稳定性及可靠性进行验证,公司将一台综合管廊巡检机器人安装于某综合管廊综合仓中,进行样机的一系列实验以及试运营。自动巡检机器人安装于该管廊N1 26+40至N1 28+40段的综合舱,共长约200m。通过实验模拟了自动巡检机器人在管廊内执行巡检任务的情况,巡检机器人能够根据设定的巡检任务开展管廊的巡检工作,巡检过程中发现异常,机器人能够将相关信息推送到管理平台。

图8 安装于管廊中的巡检机器人Fig.8 Inspection robot installed in utility tunnel
5 结语
管廊自动巡检系统的使用,可实时采集管廊内的环境参数,能够有效弥补管廊内固定监控设备的不足。另外,自动巡检系统能够代替人工巡检,及时发现管廊内各项设备的异常和故障情况,有利于减少管廊灾害和事故的发生,将有效提高城市综合管廊的运行管理效率,实现智慧城市综合管廊的自动化和智能化。
猜你喜欢
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:56
学生天地(2020年5期)2020-08-25 09:09:08
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
安全(2020年2期)2020-04-16 03:45:22
自动化学报(2019年12期)2020-01-19 05:18:14
电子制作(2019年7期)2019-04-25 13:17:10
电子测试(2018年10期)2018-06-26 05:53:36
电子测试(2018年4期)2018-05-09 07:27:32
江西建材(2018年2期)2018-04-14 08:00:23
汽车博览(2016年9期)2016-10-18 13:05:41
