载人潜水器与VR 结合的应用模式研究
2021-07-06 13:56曲文新胡中惠马利斌徐伟哲
舰船科学技术 2021年6期
邢 丹,曲文新,胡中惠,马利斌,徐伟哲
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
0 引 言
随着海洋资源勘探开发、深海科考、深海考古及深海旅游等的发展,已经有越来越多的人搭乘载人潜水器进入海底世界,但载人潜水器设计研发成本高、操作训练条件苛刻已成为制约潜水器谱系化发展、推广应用的主要因素。虚拟现实(Virtual Reality,VR)是对现实采用仿真技术、计算机图形学、人机接口技术等开发出来的一种计算机仿真系统,可以让使用者获得视觉、听觉、触觉等方面的身临其境的体验[1]。将VR 技术应用于深海装备的设计、制造、评价、仿真和培训中,充分发挥VR 技术的沉浸、交互和构想等优势,构建沉浸式交互体验平台,真实地模拟深海环境及海底作业过程,是提升潜水器设计、制造及操作训练效能的有效手段。
1 VR 在载人潜水器中应用
在载人潜水器领域中,VR 技术也已经有所应用。国内已知的有“VR 蛟龙一号”和“深海勇士VR 体验系统”,这2 个VR 系统均是以科普教育为目的研发的。其中“VR 蛟龙一号”在结构设计上对“蛟龙”号载人潜水器进行了深度还原,舱内共设4 个VR 体验座椅及头盔,体验者进入设备,带上沉浸式VR 头盔,海底画面随即扑面而来,第一人称视角可以让体验者深入其中。“深海勇士VR 体验系统”通过VR 场景模拟,多维解析了“深海勇士”号结构原理,并让观众亲身体验乘坐“深海勇士”号潜入深海进行科考作业情景。
日本海洋科学技术中心研制的“深海2000”载人潜水器、“深海6500”载人潜水器的操纵模拟器可以真实模拟潜水器的六自由度运动及舱内设备操控,同时可以展示海底场景。美国的ALVIN 号载人潜水器模拟器是一个基于全球网络的虚拟培训平台,可进行载人潜水器培操作培训及潜次任务演练[1]。
哈尔滨工程大学创建了一套具有实时运动仿真、三维水下视景虚拟仿真、声视觉仿真等功能的ROV 仿真系统。中国船舶科学研究中心在2012 年研发成功一套潜水器深海虚拟环境下的虚拟仿真系统,可以实现潜水器的可视化,直观、生动且实时的反映其姿态和水面备航、无动力下潜及近海底巡航等过程[2]。
目前VR 在潜水器方面的应用主要集中在上述的科普教育和航行仿真方面,本文以载人潜水器技术研发和装备制造、使用培训、科普示范的需求为出发点,同时参考VR 在航空航天、汽车制造等工程领域的应用方向,分析了载人潜水器与VR 结合应用的几个方向,主要包括辅助设计制造、航行运动仿真及操作教学与培训(见图1),为载人潜水器的谱系化发展、推广应用提供参考。

图1 VR 在载人潜水器中的应用Fig.1 Application of VR in HOV
2 辅助设计制造
2.1 虚拟装配
VR 技术在载人潜水器中最主要应用之一是可以实现载人潜水器的虚拟装配,通过导入三维模型到VR 系统,可以在高逼真的虚拟场景中操作三维模型,通过手部交互动作开展虚拟装配,配合实时的碰撞检测,检查模型的可装配性,对得到装配的可行序列及路径进行标记记录,同时在虚拟装配过程中可以寻找不合理的设计,反馈给设计师进行优化修改。
由于载人潜水器内部空间紧凑、装置种类繁多、集成度很高,若无指导非专业技术人员可能无法独立完成整个潜水器的虚拟装配流程,此外即使是专业技术人员,最终产生的装配序列也会存在不同,因此按虚拟装配用户方使用需求的不同,建议将虚拟装配体系分为2 个方向,在构建虚拟装配系统时应有所选择与侧重,具体见图2。

图2 从用户方需求出发搭建虚拟装配系统Fig.2 VR system based on user's requirements
第一类为面向专业技术人员的虚拟装配系统,由于专业技术人员使用该虚拟装配系统的最终目的是为了模拟载人潜水器总装建造过程,得到更高效合理的一套装配序列,及早发现装配中存在的问题来反馈给设计师,应具备以下功能:
1)具备实时碰撞检测功能;
2)装配件安装位置提示功能,例如当装配件进入指定范围内时,对装配件或装配位置进行高亮显示并自动吸附至安装位置处;
3)提供配套的安装辅助工具;
4)具备装配序列、装配路径标记记录功能;
5)可生成装配演示动画;
6)具备装配过程人机分析功能,进行部件装配过程人体姿态劳动强度分析,及时发现部件在设计、工艺规划、工装设计制造、工具使用中的缺陷,加以修正和优化,制定出最优的工作方式。
第二类为面向非专业人员的虚拟装配系统,该系统的目的更多是为了向非专业人员展示载人潜水器总装建造的过程,更偏向于科普展示与教育培训。非专业人员在使用该虚拟装配系统时,是期望能够在具有高度沉浸感的虚拟环境中体验参与载人潜水器的装配建造过程。基于该需求,面向非专业人员的虚拟装配系统装配流程不宜过于复杂,应具有明显的指向性与提示性,因此面向非专业人员的虚拟装配系统其装配序列应是固化的,此外还应具备以下功能:
1)具备实时碰撞检测功能;
2)装配件安装位置提示功能,例如当装配件进入指定范围内时,对装配件或装配位置进行高亮显示并自动吸附至安装位置处;
3)提供配套的安装辅助工具;
4)可生成装配演示动画;
5)具备下一装配件高亮/发光提示功能。
由于每台载人潜水器其总体布局均不相同,装配顺序也会有所不同,应针对性的制定初始装配序列,大体上遵循装配顺序由内而外、装配难度先难后易、能拆即能装的原则。
2.2 辅助设计
VR 除了可以用于载人潜水器虚拟装配之外,还可以用于外观设计、展示及舱内人机工程分析。
2.2.1 基于VR 的载人潜水器外观辅助设计模块
外观辅助设计旨在利用虚拟现实良好的视觉沉浸感在设计阶段直观的观察潜水器不同的灯光效果及配色方案等,帮助设计人员优化外观设计,应具备以下功能:
1)辅助开展灯光照明设计,具备多种光源模拟功能,在VR 环境下查看照明效果及摄像效果,优化灯光布局;
2)辅助开展外形设计,在VR 环境中查看多样化配色、涂装效果展示,指导外观设计。
2.2.2 基于VR 的载人潜水器舱内人机工程分析
潜水器舱内空间有限、设备众多,且整个下潜时间较长,因此潜水器操作台舒适性、人-机-环境等设计就尤为重要。以往都通过加工建造物理样机-模型球来验证舱内布局的合理性,但建造样机所需周期长、经费高、且问题暴露的晚。可构建基于VR 的载人潜水器虚拟设计制造及评价系统,提供逼近真实场景的VR 操作体验。充分考虑人体工效设计原则,综合分析人体操作安全舒适性、操作任务视野空间、人-机-环匹配度、多人协作可行性各个方面。结果用于指导并改善操作台的设计,保障操作者安全舒适性,完善多人协作流程。进而设计师可以在设计阶段进行设计更新。
人机工程分析的主要内容应包括:
1)人安全舒适性分析。基于人体解剖生理基础、工效学经典分析范式以及肌肉骨骼生物力学模型等的综合性分析,对人体安全性、舒适性进行综合评估。
2)人机匹配技术。将动态人体参数与静态环境参数进行空间上的匹配,从而辅助人体机能特点包括可达域、可视域等进行综合分析。
3)多人操作协同性分析。进行任务分析,将任务子环节时序、任务需求等信息同多人作业过程中存在的空间需求问题相结合,从而发掘多人操作协同性问题并提出改进分析。
4)舱内配色设计。根据不同色彩的性质,通过科学配色来营造出使人舒适和安全的作业环境。使得操作者对设备、仪表、操作面板等容易分辨,注意力集中,眼睛不疲乏,而且光线可以有效利用,从而间接的可减少事故、提高工作效率。
3 航行运动仿真
载人潜水器航行运动仿真系统可按照观察者与潜水器的相对位置分为2 种:一种是人在潜水器外可以观察到潜水器运动的大场景模拟,一般用来进行潜水器的潜浮性能研究;一种是人在潜水器内,所能观察到的仅是通过观察窗及视频系统所拍摄的外部场景。在2 种模式中,核心均是相关人员根据仿真系统反馈的潜水器六自由度运动信息对潜水器进行操纵控制,区别只是视角的切换。载人潜水器在海水中运动,由于其所处深度、环境、光照、速度不同,会产生不同的环境效果。依托载人潜水器在真实环境中的操控规程,构建基于VR 的载人潜水器航行运动仿真系统,实现模拟载人潜水器的上浮、下潜、前进、后退、回转、坐底、悬停等真实运动过程,协助潜航员培训、提供设计反馈。
3.1 运动仿真方法
文献[3-4]介绍了载人潜水器水下六自由度运动数学模型,给出了基于虚拟现实的潜水器操纵运动仿真系统的体系结构,但两者都关注于海底视景中的潜水器三维空间机动,没有考虑潜水器的“无动力下潜、上浮运动”过程。由于大深度载人潜水器受重量、体积限制,所带能源有限,所以在从海面下潜到海底深处及从海底深处返回到海面的过程中不使用艇载能源,而下潜、上浮速度会直接影响潜水器在海底工作的时间。无动力潜浮运动既要保证潜水器的稳定性,又要保证潜浮速度。为了保证无动力下潜、上浮速度,需要精确计算可弃压载的重量以指导水面备航。整个航行仿真系统的算法应包括“无动力下潜、上浮”和海底机动两部分。
紧靠剩余浮力作用的潜水器垂直面内下潜、上浮运动攻角很大,所受流体动力无法用传统的多项式表达方式表示,必须重新测量或计算。刘正元[5]建立了垂直面内大攻角数学模型,采用Matlab/Simulink 软件对潜水器潜伏运动进行了仿真计算。马岭[6]利用GRNN神经网络建立了垂直面内水动力随攻角变化的数学模型,预报了“蛟龙” 号载人潜水器的潜伏性能。潘彬彬[7]在“蛟龙”号载人潜水器海试数据的基础上引入可变体积收缩率的概念改进了潜器无动力上浮下潜模型。
3.2 仿真系统要求
基于虚拟现实的载人潜水器航行运动仿真系统主要包括模拟载人舱显控系统、视景系统等。模拟载人舱显控系统主要进行导演设定、操纵信号采集、操作状态显示、综合信息显示、运动仿真解算等工作,运动仿真软件采集导演设定和操纵信号,实时解算并向视景系统传送潜水器的运动响应,实时刷新综合显示信息。视景系统根据运动仿真解算输出的潜水器姿态及位置坐标而实时更新深海地貌和海洋环境。
航行运动仿真系统应满足如下要求:
1)仿真系统硬件设施应与潜水器保持一致,包括潜水器舱内装置、操作面板和操作杆。
2)视景系统应能体现载人潜水器的六自由度运动,具有碰撞检测和水下灯光特效等功能,实时生成可以使操纵人员身临其境的三维海底视景,包括海底的山谷、海沟、平坦海底、水生物等,并将一些特殊的地貌如深海热液喷口、钴结壳等融入到模拟海底地貌中。
3)具备根据下潜、上浮速度与深度要求,给出对应的下潜、上浮压载重量用于水面备航的功能。。
4)具备根据解算出的潜水器姿态信息,可给使用者纵倾、横倾、下潜和上浮等人体动感反馈。
4 操作教学与培训
利用VR 营造高逼真虚拟环境,可以针对不同的水下作业环境、突发场景及培训的需求等构建VR 系统,从而实现对潜航员的操作教学与培训,减少培训时间与成本。
以潜航员培训需求为出发点,潜航员操作教学与培训体系可划分为总体装配过程操作培训模块、生命支持系统操作培训模块、航行驾驶操作培训模块、机械手操作培训模块、应急操作模块和作业场景模拟训练模块这6 大部分。
4.1 总体装配过程操作培训模块
总体装配操作培训模块的目的在于应用VR 优势快速帮助潜航员掌握潜水器总体布置,协助其了解主要装置部件的安装、拆卸流程,帮助潜航员掌握装置部件的安装与维护方法,可将面向非专业技术人员使用的虚拟装配系统融入该操作模块。
4.2 生命支持系统操作培训模块
生命支持装置由电控部件、气态供氧部件、氧烛部件、开放式二氧化碳吸收部件、闭式呼吸部件、舱压提升部件、空气净化部件以及一些辅助设备等组成,生命支持装置舱内布置见图 3。

图3 生命支持装置Fig.3 Life support device
在VR 系统中构建生命支持装置,设置的培训内容包括:气态供氧自动供氧、手动供氧操作;闭式呼吸操作;氧烛供氧操作;氧气浓度、二氧化碳浓度、湿度、温度、压力检查;二氧化碳吸收剂、干燥剂的补充;提升舱压操作;利用导氧泵进行氧气瓶与空气瓶充气操作等。
4.3 航行驾驶操作培训模块
航行驾驶操作培训模块的目的是为了训练潜航员驾驶潜水器,主要涉及到航行控制、姿态调节、可调压载水调节、下潜上浮压载抛弃等内容。在航行运动仿真的基础上训练潜航员的操作技能。
4.4 机械手操作培训模块
潜航员如何高效获取海底资源,通常取决于机械手操作熟练程度。通过舱内机械手主手来控制机械手从手的运动,完成机械手抓取生物、样品的操作,机械手为7 功能主从式机械式,在VR 系统中需要将主手与从手关节运动一一对应,主从手1#~7#关节对应位置如图 4 和图 5 所示。
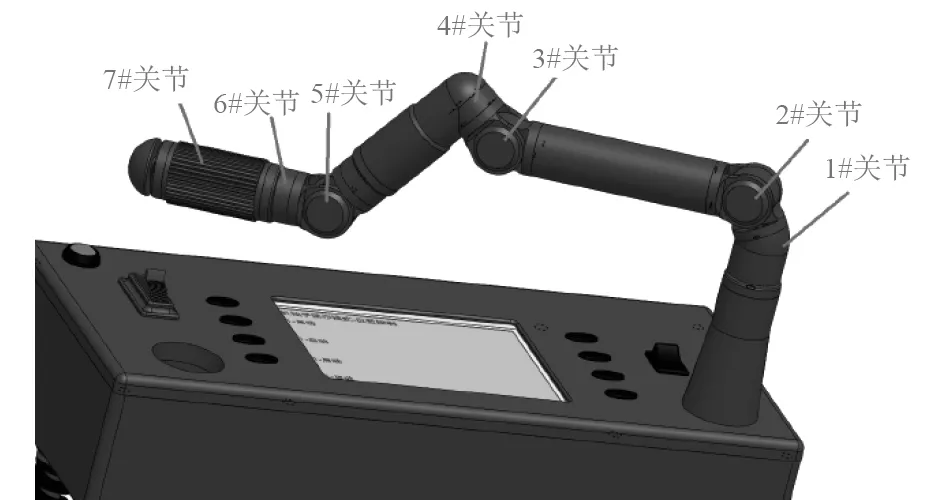
图4 主手关节对应位置图Fig.4 Main hand joint
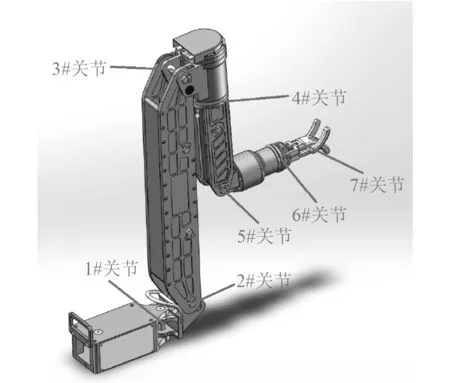
图5 从手关节对应位置图Fig.5 Manipulator joint
在机械手操作培训模块中,除了机械手主手、从手之外,还需要在VR 中构建观察窗、采样篮、采样工具及具有代表特征的水下作业环境。
4.5 应急操作培训模块
当载人潜水器在水下无法抛弃压载、抛弃几组压载无法上浮或者遇到紧急故障需要快速上浮时,应由潜航员在舱内启动应急处理程序,保证人员和潜水器的安全。使用应急程序的代价过于昂贵,因此有必要在VR 系统中设置应急操作培训模块,以强化潜航员的应急反应能力,降低培训成本。
4.6 作业场景模拟演练模块
载人潜水器通常需要在不同的海区执行不同的作业任务,如深海考古、水体采样、生物捕获、地质考察等。搭建具有代表特征的水下作业环境,配合多种不同类型的作业工具及机械手完成作业场景的模拟演练,在VR 系统中模拟的水下作业环境主要包括:冷泉区作业仿真演练、热液硫化物区作业仿真演练、富钴结壳矿区作业仿真演练、浅海区(水下考古)作业仿真演练。
4.7 全流程操作培训
载人潜水器一次下潜试验全流程包括机库通电检查、布放、水面检查、下潜、作业、上浮、回收7 大步。其中载人潜水器的布放与回收工作,主要由母船主甲板上吊放系统操作员负责完成,潜航员在舱内不进行潜水器的操作,在构建全流程操作培训模块时可不予以考虑。将生命支持系统操作培训、航行驾驶操作培训、机械手操作培训、应急操作培训、作业场景模拟演练5 个子模块进行融合,构建完成全流程操作培训模块,见图 6。
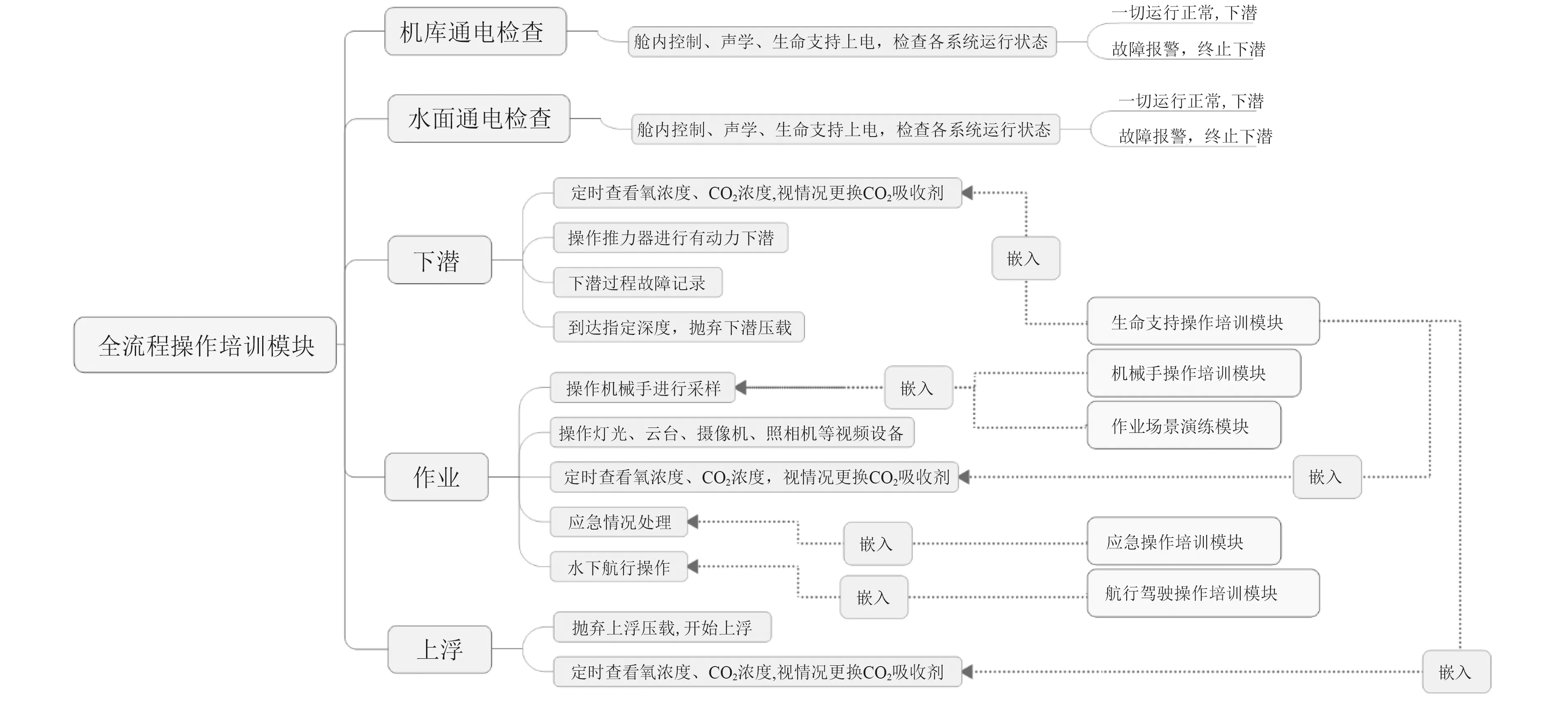
图6 全流程操作培训模块功能划分Fig.6 The whole process operation training module function division
在构建载人舱内VR 场景时,可对原模型进行简化处理,去掉隐藏在面板、支架后的设备,仅保留视野范围内的零部件,关键部件应具有可操作性(如机械手主手、主副操纵杆等),对于综合显控、航行控制、声学通讯、成像声呐及视频监控等显示器应具备动态显示功能,指示灯具备故障报警指示功能。
5 维护保障
由于载人潜水器具有尺寸大、结构复杂和零部件数目众多等特点,在载人潜水器以往的应用航次中均需要潜水器总装设计单位配备专业的保障团队。基于VR 的虚拟现实技术,总装设计单位的保障团队可以缩小规模甚至取消。
维修保障系统模块应包括以下内容:
1)潜水器装配模型数据库,可将面向非专业技术人员使用的虚拟装配系统融入该操作模块。
2)潜水器各设备信息库,包括设备生产厂家、有效期、备件信息、装配工艺信息、工作状态信息等。
3)潜次信息库,实时更新潜次信息,包括各设备的运行情况及故障信息等写入设备信息库。
在潜器出现故障情况时,可通过虚拟现实与真实潜水器的叠加,迅速判断故障位置。然后调用故障设备信息,即可迅速进行维修或更换。现场人员无法解决时,得益于更低延迟、更快速的5G 网络,使得技术人员和工程师远程执行维护、维修得以实现。
同时,基于拥有的历史数据,再利用大数据技术可以预测潜水器的健康状况,并进行风险管理,为潜水器提供预测性维修,提高潜水器的可靠性与运行效率。高精度和实时采集的数据将是基于VR 的维护保障系统的基础,高质量的数据管理是维护保障系统成功的关键。
6 结 语
本文从最初的设计、建造、培训、运行,到后期的维修、系列化推广、科普应用等方面追踪潜水器的设计制造、全寿命过程及其衍生物,深入发掘与VR结合的应用模式及VR 的不同展现方式。主要论述了在辅助设计制造、航行运动仿真、操作教学与培训、维护保障方面的VR 的需求,为载人潜水器与VR 结合提供支持。VR 加大数据必将改变传统的载人潜水器设计、运营模式,开创载人潜水器设计、运营新态势。
猜你喜欢
卫星应用(2022年9期)2022-10-20
舰船科学技术(2022年10期)2022-06-17
军事文摘(2022年10期)2022-06-15
国际太空(2021年10期)2021-12-02
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09