
有砟轨道线路精测网控制法误差研究
2021-07-05 05:47刘娇娇
安家(建筑与工程) 2021年9期
关键词:误差
刘娇娇
摘要:线路维护过程中,会产生精测网控制误差和弦测误差。在弦测法的研究中,分别提出了三点弦测法和四点弦测法。铁路精测网是保证铁路线路施工、轨道养护维修的重要基础,采用精测网进行线路线形控制,是以线路的平面、高程坐标为基准,使线路实际线形与设计线形之间的偏差值达到最小。精测网是线路施工的基础,也是线路养护维修的重要保障。我国铁路工程精密测量控制体系包括平面控制网和高程控制网,轨道控制网(CPⅢ)在轨道的养护维修中发挥重要作用,是轨道测量、养护维修的基础,根据轨道控制网确定自由设站点坐标,进而对线路进行观测得到不平顺值。在测站坐标计算时,通常采用三维测量方法,平差过程会产生一定的误差。另外,线路基础变化会导致CPⅢ点位发生偏移,进而导致线路测量结果发生变化,带来线形控制误差。
关键词:有砟轨道;线形控制;精测网;误差;
引言
近年来,随着高铁的快速发展,投入运营的高铁线路越来越多,由于200~250km/h的高铁线路多以有砟轨道为主,因此重视研究、探索解决有砟轨道病害特别是长波不平顺病害在维护中存在的运用管理薄弱、作业精度不高、生产组织不合理、作业质量跟踪监控不严等问题,对于提高有砟轨道养修管理水平,确保高铁设备运营安全,具有重要意义。
1精测网的运用概况
现有的高速铁路均建立统一的精测网,是用于勘察设计、工程施工和运营维护统一的测量基准。
工程测量平面控制网在框架平面控制网上(CP0)的基础上分三级布设,第一级为测量栅栏外部高程即基础平面控制网(CPⅠ),第二级为曲线特征点测量即线路平面控制网(CPⅡ),第三级为线路平纵断面测量即轨道控制网(CPⅢ)。高程测量控制网分两级布设,第一级为基岩点、深埋水准点和普通水准点也就是线路水准基点控制网,第二级为轨道控制网(CPⅢ)。CPⅢ平面网是一个立体三维网络平面线形图,其测量方法较传统抄平测量更加立体客观准确。它采用自由测站边角交会法测量,即每站重复测量三个点,其距离只能进行单程观测。控制网的使用较传统方法有很大不同,首先是按照平面CPⅢ和栅栏外高程CPⅠ及曲线特征点CPⅡ构筑网络图,通过推进四维小车构筑线型,采用自由测站后方变长交会测量方法确定测站点的三维坐标,然后用三维极坐标测量的方法进行轨道的精调、精测、工程施工以及运营维护管理等。
2误差产生原因分析
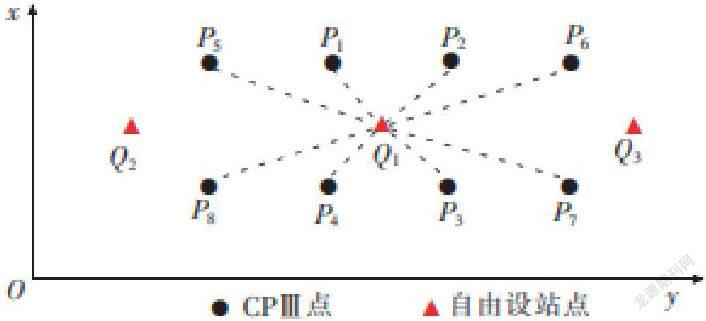
精测网的CPⅢ点,自由设站示意图如下图所示,其中y轴为线路纵向,x轴为横向。点Q1为自由设站点,点P1,P2,P3,P4,P5,P6,P7,P8为8个已知坐标的CPⅢ点,其中P1,P2,P3,P4距离自由设站点Q1较近,P5,P6,P7,P8距离较远。y轴方向上两点间隔60m左右,x轴方向上两点间隔10m左右。P1,P2,P3,P4与Q1距离相近,均为30m左右;P5,P6,P7,P8在观测过程中,从测站Q1对多个CPⅢ点进行观测,得到多个观测值。由于机械误差、环境变化等因素,导致解算的测站坐标结果会有所偏差,因此需要对计算结果进行平差。平差过程中,无法直接判断各个观测值的权重,对观测值进行定权时,当检验值未达到标准时需继续平差;当检验值达到标准时,则认为定权结束。因此,精测网控制线形时,三维平差误差是一个重要的误差来源。当线路基础发生变化时,CPⅢ点也会随之发生一定的偏移。《高速铁路工程测量规范》(TB10601-2009)中规定:CPⅢ点复测坐标与原测坐标增量较差≤±2mm时,沿用原测量成果。即当CPⅢ点偏移量△X、△Y小于等于2mm时,仍然会按照CPⅢ点原坐标进行计算,使得测站平面坐标、高程计算结果发生改变,进而导致采集的轨道点坐标发生改变。故而CPⅢ点位偏移会导致线路测量结果发生变化,带来线形控制误差。
3精测阶段的精测网数据的采集及运用方式
3.1精测阶段的精测网数据的采集
(1)复核设计资料,利用提供的设计资料,对水平曲线、竖向曲线、横向坡度进行编辑,如存在断链,需分别输入。水平曲线的编辑中应包括起点坐标、终点坐标、方位角、起缓和线长、终缓和线长、曲线半径(沿着里程增大的方向右转曲线半径为正值,左转曲线半径为负值)、曲线超高;竖曲线的编辑中应包括起点高程、终点高程、竖曲线半径(曲线为凸的半径值为正,为凹的半径值为负)、坡度降低值;横向坡度的编辑中应包括左轨高程、右轨高程、坡型。
(2)利用全站仪测量四维小车棱镜中心的三维坐标值,结合四维小车已知的几何参数、小车的方向参数,进而确定相应股道的实际位置、实际高程、水平传感器测量的水平角和轨距。然后,将测量值与该站点的设计平面及高程数值进行比较,进而得到小车的测量偏差。
3.2精测数据误差分析
CPⅢ点的偏移会改变测站点坐标,从而影响轨道平面指示器的测量值。考虑到点位、高程坐标变化、轨道距离、水平、垂直和侧向误差,选取8个CPⅢ点作为研究区域并进行分析,得出轨道交通指标偏差的总体趋势是,當两个图元高程点的坐标变化值相等时,CPⅢ点偏移值越小,测站坐标受影响最大。
3.3测量模式调整量精度对比
在实际测量中,取全站仪与轨检小车棱镜高差为1.2m,最远的轨道测距为70m,最近轨道测距为3m。对于改进前的测量模式,每隔1m测量一个点,根据每个点的理论斜距、水平角和天顶距,并将进行拟合,考虑全站仪测量误差的极端情况,得到轨道上由于各个点测量误差引起的调整量的误差曲线。对于水平面调整量误差,误差值在距离全站仪最近时最小,随着测量距离的增加,误差值几乎呈线性增加。对于高程调整量的误差,误差值随着测量距离减小逐渐增加,靠近全站仪时,误差值几乎呈指数增加。轨道精测中,水平面的调整量和纵断面的调整量都主要受到测量距离和天顶距的影响,而受水平角变化的影响较小。在实际测量过程中,通过减小全站仪与轨检小车棱镜的高差,从而减小天顶距,可以减小测量误差对高程调整量的影响。当全站仪与轨检小车棱镜的高差为0.2m时,得到轨道上由于各个点测量误差引起的调整量的误差曲线较缓和。因此实际测量过程中,可以尽量减小全站仪与轨检小车棱镜自己的高差来减小测量误差对高程调整量的影响。
结束语
(1)根据我国铁路精密控制测量体系及精测网控制法原理,分析得知导致精测网控制法误差产生的主要来源包括两个方面:三维平差误差、点位变化误差。
(2)精测网控制法中,测站坐标误差的整体趋势为:控制点距离测站越近,则其变化对测站坐标的影响越大,与测站相距较远的控制点其变化对测站坐标的影响相对较小。其他因素不变时,测站坐标误差随着坐标变化量增大而增大。相邻测站与本测站坐标误差变化趋势相同,数值不同。
(3)轨道不平顺指标误差变化的整体趋势为:对于任意一个单项,CPⅢ点坐标变化量相同时,与测站距离更小的CPⅢ点引起误差更大。轨道不平顺指标中,受到影响最大的为轨向,其次为轨距和水平,影响最小的为高低。
参考文献
[1]许玉德,鲁思成,赵梓含.有砟轨道线路精测网控制法误差研究[J].华东交通大学学报,2021,38(02):29-36.
[2]漆光凯,李国昌.高速铁路有砟轨道维修管理与作业质量控制[J].铁道运营技术,2020,26(04):5-7.
[3]康小舟.有砟轨道无缝线路铺轨施工技术研究[J].建材与装饰,2020(08):284-285.
[4]于国存.关于有砟轨道无缝线路施工的技术研究[J].冶金管理,2019(23):69-70.
[5]梁勇.高速铁路有砟轨道线路清筛安全风险防控[J].铁道运营技术,2019,25(03):4-5.
中国铁路郑州局集团有限公司郑州东高铁基础设施段 河南 郑州 450000
猜你喜欢
商品与质量(2021年43期)2022-01-18
哈尔滨轴承(2020年2期)2020-11-06
今日中国·法文版(2020年7期)2020-07-04
中国特种设备安全(2019年1期)2019-03-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
四川师范大学学报(自然科学版)(2015年1期)2015-02-28
海峡科学(2013年3期)2013-10-21
