康复机器人柔顺变刚度驱动机构研究进展
2021-07-05 07:23陆盛胡冰山程科喻洪流倪伟
中国康复理论与实践 2021年6期
陆盛,胡冰山,程科,喻洪流,倪伟
1.上海理工大学康复工程与技术研究所,上海市 200093;2.上海康复器械工程技术研究中心,上海市200093
康复机器人既要求具备合适的刚度,保证闭环控制的稳定性和良好的控制带宽,以在规定时间内带动患者肢体到达指定位置实现被动训练[1];还必须具备良好的柔顺性,在主动训练和抗阻训练阶段跟随患者肢体,并分别给患者肢体施加不同的作用力,以保证康复过程的安全性和舒适性,增强康复训练的效果[2]。传统康复机器人通常在刚性驱动机构的基础上,增加传感器种类和数量,通过采集足够多的位置、力矩、速度等数据,设计能够高效处理这些数据的控制器控制康复机器人的阻抗[3]。这就使得此类驱动机构要求传感器、驱动及控制电路运行速度足够快,并且控制器复杂,要求建立精确的动力学模型[4]。而且传统刚性驱动机构不是本质柔顺,不能储存能量,也不能吸收碰撞瞬时的能量。
与传统机器人相比,以肌肉骨骼系统作为驱动的人类,能够调节肢体关节刚度以适应环境的变化,在控制位置的同时,具有良好的柔顺变刚度特性。例如当肘关节作屈肘运动时,肱二头肌收缩,肱三头肌放松;当关节位置不变时,肌肉张力增加,即关节的刚度增加[5-6]。若能使康复机器人驱动关节也具有良好的变刚度特性,同时具备本质柔顺属性,无疑将使康复机器人更能适应被动、主动及抗阻训练时刚度的变化,并提高人机交互的安全性和环境适应性[7-8]。
本文在查阅国内外大量文献的基础上,分析目前的变刚度驱动机构的原理并进行分类,对变刚度机构在康复机器人中的应用进行综述,总结目前变刚度机构在康复机器人应用中存在的问题及发展趋势。
1 变刚度驱动机构原理
变刚度驱动机构是指驱动机构输出端与环境之间的刚度可以调节的一类驱动机构,变刚度驱动机构有多种分类方式,如按照电机布局可分为并联型和串联型两大类。本文按照驱动机构中变刚度部件的机械原理分为四大类:弹性元件柔顺变刚度机构、气动主动柔顺变刚度机构、电-磁柔顺变刚度机构和智能材料柔顺变刚度机构。
1.1 弹性元件柔顺变刚度机构
弹性元件柔顺变刚度机构按照结构形式可分为三角形结构、四杆结构、杠杆结构和特殊曲面结构4类[9]。
1.1.1三角形结构
三角形结构弹性元件柔顺变刚度机构工作原理见图1。它多运用在绳驱机构上,由动滑轮、定滑轮组成的滑轮组和定刚度弹簧构成。当绳子两端受力时,动滑轮上抬,弹簧压缩量发生改变,改变绳子上的张紧力,最终调整绳驱动机构末端的刚度。刚度(K)表达式如下:

图1 三角形结构弹性元件柔顺变刚度机构原理

式(1)、(2)中,a为动滑轮到定滑轮组之间的横向距离,b为动滑轮到绳末端的纵向距离,b-λ为弹簧的形变量,θ为绳与绳之间的夹角,L为斜边的绳长,F为绳末端的拉力。
Ogane 等[10-11]为仿生肌骨机器人设计的绳驱动机构(图2)和德国宇航中心研制的DAVID 机器人系统中的变刚度五指手(图3)就采用这种三角形结构的变刚度机构,当绳子两端拉伸时,弹簧压缩量发生变化,变刚度驱动机构的刚度特性也随之发生改变。该类变刚度驱动机构的刚度特性与机构中的弹簧刚度,以及定滑轮、动滑轮之间的几何位置有关,一旦选定就无法改变固有机械刚度,没有设置专门的刚度调节电机。

图2 仿生肌骨机器人绳驱动机构[10]

图3 德宇航DAVID手臂[11]
1.1.2四杆结构
四杆结构弹性元件柔顺变刚度驱动机构工作原理见图4。它运用在转动关节上,由刚度调节电机、滑块、四杆和弹簧组成。刚度调节电机推动滑块相向移动,拉伸弹簧,刚度发生变化。

图4 四杆结构变刚度弹性元件变刚度原理
Huang等[12]设计的连续状态耦合弹性驱动机构(图5)就采用四杆结构变刚度原理。其中的刚度调节电机带动双端螺纹丝杠转动,刚度调整螺母滑块向两侧移动调节弹簧预压缩量调节刚度。当输出轴上受到环境负载时,扭矩使得蜗杆移动,压缩一侧弹簧,另一侧弹簧延长。

图5 连续状态耦合弹性驱动变刚度机构[12]
Li等[13]研制一种特殊的四杆结构变刚度驱动机构(图6)。四杆结构变刚度驱动机构主要由弹簧、钢缆、若干滑轮、输入法兰、输出法兰和蜗轮、蜗杆组成。蜗轮、蜗杆转动,绷紧或放松钢丝绳,调节弹簧的预压缩量。输出法兰相对于输入法兰转动时,当钢丝绳被拉紧时,整个结构呈现高刚度;当钢丝绳处于放松时,整个结构处于柔顺状态。
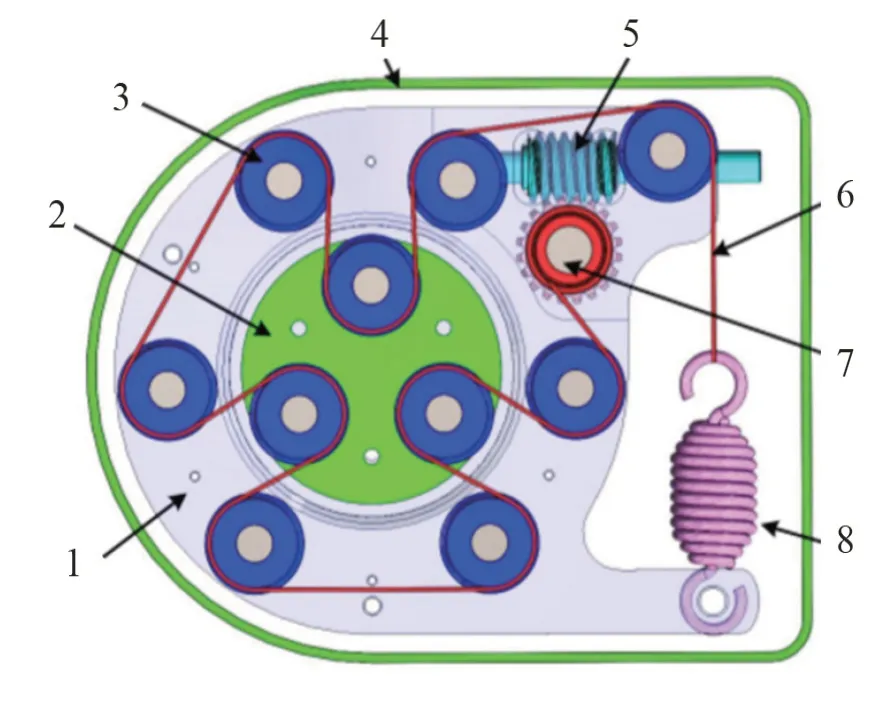
图6 四杆结构变刚度机构模型[13]
1.1.3杠杆结构
杠杆结构弹性元件变刚度驱动机构运作原理有3 种,通过移动弹簧位置、负载点、杠杆支点位置来调节机构的刚度特性(图7)。
当杠杆支点和负载点位置恒定时,通过调节弹簧的位置,改变杠杆臂的长度来调整机构的刚度,如图7(a)所示,弹簧位置离杠杆支点越远,刚度越大,反之亦然。刚度表达式如下:

式(4)中:τ表示外力F的等效外力矩,θ表示杠杆受外力产生的偏角,R表示有效杠杆臂(弹簧与支点间的距离),k表示弹簧的弹性系数。
当杠杆支点和弹簧位置恒定时,通过调节负载点在杠杆上的位置,改变有效杠杆臂的长度来调整机构的刚度,如图7(b)所示,负载点离杠杆支点越远刚度越小,反之亦然。刚度表达式如下:

当负载点和弹簧位置恒定时,调节杠杆支点的位置,从而调整机构的刚度,如图7(c)所示。变刚度表达式如下:
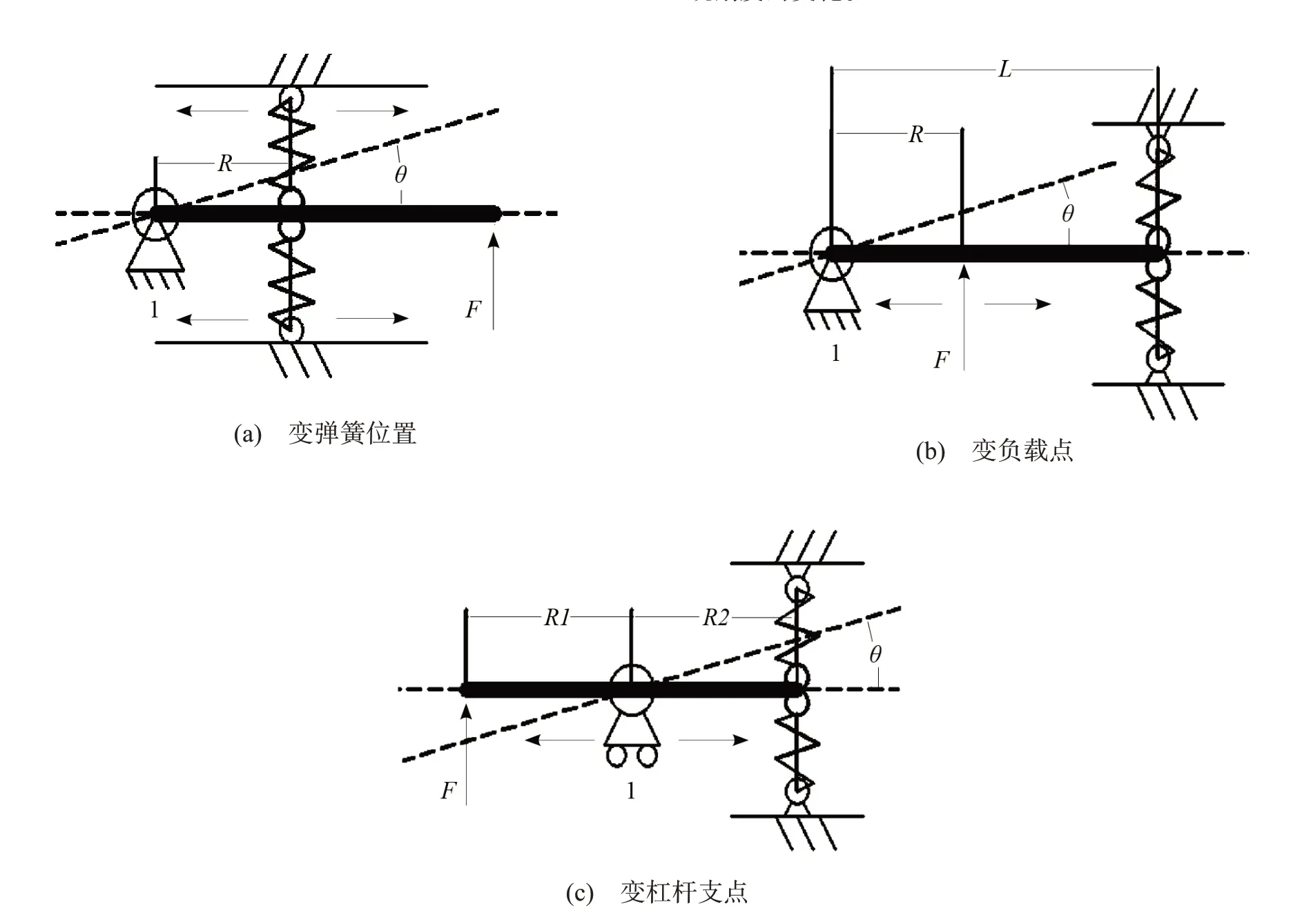
图7 杠杆结构变刚度驱动机构原理

式(6)中:R1表示支点到弹簧间的距离,R2表示支点到外力作用点的距离,α为杠杆力臂的比值,即α=R1/R2。当α变小时,刚度越大,反之亦然[14]。
Okubo 等[15]基于杠杆结构变弹簧位置刚度调节原理(图8),研制一种可以用于外骨骼的变刚度驱动机构。其设计的新颖之处在于,弹簧力垂直于改变刚度所需的位移,调整刚度时所需的能量小。

图8 变刚度驱动机构[15]
基于杠杆结构变负载点刚度调节原理,Visser 等[16]设计一种变刚度驱动机构(图9),包含杠杆机构、弹簧、电机,该机构能够提高能源效率,达到节能效果。

图9 变刚度驱动机构[16]
基于杠杆结构变杠杆支点刚度调节原理,Sun 等[17]设计一种串联变刚度机构(图10)。其位置控制电机安装于主轴上,变刚度驱动电机偏置于位置控制电机侧面,调控阿基米德螺旋凸轮的转动。该刚度驱动机构包括杠杆结构、对置弹簧、阿基米德螺旋凸轮盘,通过阿基米德螺旋凸轮盘的转动,带动杠杆支点沿杠杆平移,杠杆支点位置发生变化,整个机构的刚度也随之改变。该机构具有弹簧保持沿弹簧轴压缩,弹簧力垂直于输出杆传递力并能够提供较大的偏转角的优点。

图10 旋转串联变刚度机构[17]
1.1.4特殊曲面结构
特殊曲面柔顺变刚度机构工作原理见图11。利用凸轮或特殊曲面的非线性弧度对弹簧进行压缩,受非线性弧度的影响,弹簧压缩量呈现非线性趋势,使机构具有非线性刚度调节特点。其刚度表达式如下:

图11 特殊曲面结构原理

式(7)(8)中μ为凸轮与凸轮盘间的摩擦力,fl(φ)为凸轮盘轮廓线,R为凸轮盘半径,r为凸轮半径,k为弹簧刚度,l为弹簧预压缩量,φ为关节形变角,θ为位置电机转动角。
Wolf 等[18]研制变刚度关节浮动弹簧关节(floating spring joint,FSJ) (图12),其位置控制电机安装在谐波减速器波发生器与壳体之间,变刚度驱动机构串联在柔轮与关节输出轴之间,变刚度驱动机构包括刚度调整电机、减速器、凸轮盘、凸轮和弹簧,通过刚度控制电机改变凸轮盘的相对位置,控制弹簧的预载荷,调整关节的刚度;当关节受到被动力矩载荷时,凸轮盘发生相对转动,产生弹性恢复力矩。Zhu 等[18-19]结合凸轮变刚度原理和杠杆结构变杠杆支点刚度调节原理研制一种新型变刚度机构,该机构由输出轴、杠杆、直线螺杆单元、凸轮盘、两个带滚子的滑块组成。凸轮盘转动压缩弹簧,产生弹力,弹力传递到杠杆上,再由刚度调整电机控制枢轴的位置实现刚度的变化。

图12 变刚度关节FSJ示意图[18]
1.2 气动元件柔顺变刚度驱动机构
气动元件本身具有阻抗,同时又由柔顺韧性材料制成,因此运用气动元件作为变刚度部件是近几年热门的研究方向。气动主动柔顺变刚度驱动机构可分为三大类[20],包含耦合结构变刚度机构、阻塞原理变刚度机构和层干扰变刚度机构。
1.2.1耦合结构变刚度机构
耦合结构的原理是利用冗余驱动形成结构间的拮抗作用,使其处于一种受力平衡、结构稳定的状态来调整其刚度。
Giannaccini等[21]设计一种变刚度气动连续体机械臂(图13)。该机械臂由6 块收缩气动肌肉驱动器和1 块伸展气动肌肉驱动器平行布置而成,通过控制组合式气动肌肉驱动器的压力可以得到一系列不同的刚度。例如,通过同时增加伸展和收缩气动肌肉驱动器的内压,可让机械臂呈现高刚度状态;对伸展气动肌肉驱动器充气,并对6 块收缩气动肌肉驱动器放气,可让机械臂呈现柔顺状态。
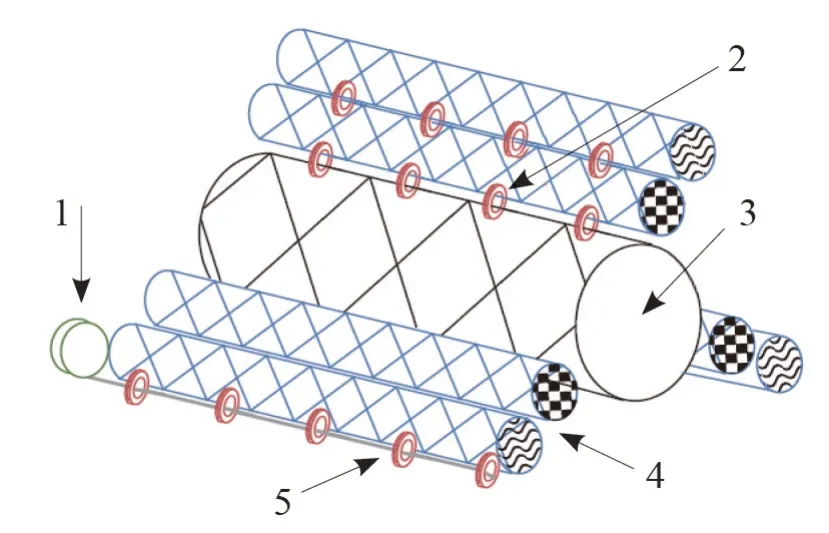
图13 气动连续体机械臂[21]
1.2.2阻塞原理变刚度机构
阻塞原理变刚度是利用固体颗粒物质在受限的环境中失去流动性,改变驱动机构的刚度特性(图14)。在气动元件中利用颗粒阻塞来实现刚度的调节是最常见的方式。
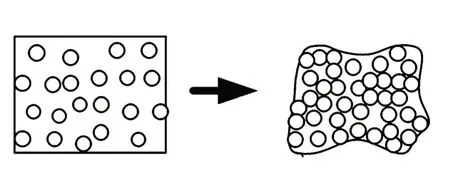
图14 阻塞原理
Li 等[22]提出一种变刚度柔性末端效应器(图15)。该夹持器由柔性硅胶驱动器、颗粒组件和外壳组合而成。对驱动器充气,颗粒组件受到压力的挤压丧失流动性,产生阻塞现象,使末端效应器手爪呈现高刚度状态。

图15 无源粒子阻塞末端效应器[22]
1.2.3层干扰变刚度机构
层干扰变刚度(图16)是通过外力、负压等方式增大层与层之间的摩擦力和拮抗作用,使得机构呈现刚度特性的变化,其变刚度计算公式如下:

图16 层干扰原理

式(9)(10)中,p为机构表面承受的外界压力,ω为机构表面的宽度,L为机构表面的长度,F为机构承受的拉力。将面与面之间的接触数量定义为n,面与面间的摩擦系数为μ,可增加p的值来改变F的大小,当S长度不变时,刚度随F的增大而增大[23]。
Choi等[24]基于层干扰变刚度原理设计滑动连杆层干扰机构(图17)。整个机构由线性刚度可变的柔性外壳、气动驱动机构、柔性铰链、层干扰机构组成。气动驱动机构将柔性外壳内部抽成真空状态,受真空状态影响,层与层之间的屈服应力增大,刚度增大,结构更加稳定。

图17 滑动连杆层干扰机构层间干扰机构[24]
1.3 电-磁元件柔顺变刚度机构
电-磁元件柔顺变刚度是最近几年开发的一种新型变刚度驱动机构,它利用电磁场改变机构刚度特性,目前主要分为静电层干扰变刚度机构和电流磁效应变刚度机构。
1.3.1静电层干扰变刚度机构
基于静电吸附原理,Wang 等[25]提出的一种静电层干扰变刚度(图18)软体机器人。静电层干扰变刚度和气动层干扰原理相同,不同的是前者通过静电吸引来挤压材料层,使得层与层间产生摩擦力,摩擦力限制层与层之间的相对滑动,从而实现机构刚度的调整。静电层干扰变刚度与气动层干扰相比具有更大的刚度变化能力,且更节省空间。

图18 静电层干扰[25]
1.3.2电流磁效应变刚度机构
Heya 等[26]提出一种磁丝杠变刚度驱动机构(图19),它利用两个转轴产生磁相位差,调整机构刚度特性。位置控制电机带动丝杠正转,刚度调节电机带动转轴3 反转,磁性螺母转轴2由转轴3 带动,磁丝杠转轴1 与磁性螺母转轴2 反向转动产生相位差,推动转轴3 向右移动。该机构由于无摩擦接触,驱动效率高,它可以在没有机械弹簧的情况下灵活地响应外力;同时有效解决了变刚度机构变刚度传递过程中产生的振动、噪声,以及由摩擦导致传动效率低下等问题。
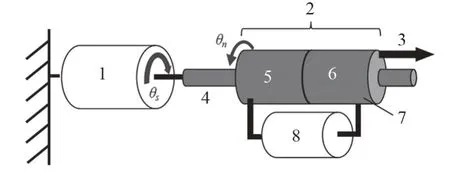
图19 磁丝杠变刚度驱动机构[26]
1.4 智能材料变刚度柔顺机构
智能材料变刚度柔顺机构指的是在材料或者结构方面具有可控的变刚度能力。利用形状记忆合金的应力应变随温度变化的特点,Liao 等[27]提出一种形状记忆合金变刚度驱动机构(图20),通过电流调节形状记忆合金的温度,进而控制嵌入形状记忆合金丝的聚已酸内酯管道的刚度。该机构在断电时,管道的温度等于室温,此时驱动机构的刚度最小。通电后,管道温度逐渐升高,驱动机构刚度逐渐增大。

图20 记忆合金变刚度机构[27]
2 变刚度驱动机构在康复机器人中的应用
变刚度驱动机构由于其本质柔顺特性及机械刚度的可调整性,目前正逐步应用到上下肢康复机器人、被动助力下肢外骨骼和智能仿生假肢中。
2.1 上下肢康复机器人中的变刚度机构
脑卒中、截瘫患者肢体的刚度随着康复阶段而发生变换,柔顺变刚度驱动机构刚度调节范围较宽,能够更好适应患者肢体刚度的变化,被动柔顺特性的引入则提高了人机交互的安全性,可适应痉挛、碰撞等情况的发生。
Liu 等[28]设计一种变刚度肘关节外骨骼康复机器人(图21)。在主动康复训练和被动康复训练模式中,可为那些上肢特定损伤患者提供最佳的肘关节刚度。对于上肢严重受损的患者,外骨骼可以在柔顺模式下带动患者的手臂完成康复训练;当患者恢复了上肢部分能力时,患者可以在高刚度模式下进行康复训练。Song等[29]基于特殊曲面变刚度原理设计的膝关节康复机器人(图22),实现了“低负荷、低刚度与高负荷、高刚度”的人机交互特性,因其具有非线性刚度调节,康复过程中可以更好模拟人体与外界环境的相互作用,从而达到更好的康复训练效果。

图21 肘关节外骨骼康复机器人[28]
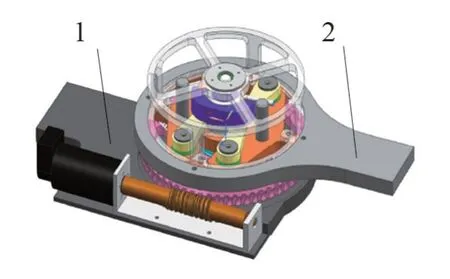
图22 膝关节康复机器人[29]
2.2 被动助力外骨骼中的变刚度机构
不同身高、体质量的人在不同速度下、不同步态阶段时,下肢主要关节刚度存在差异[13],被动变刚度外骨骼能更好适应关节的刚度变化,提供良好的人机交互,起到助力效果,减少人体能耗。
基于特殊曲面柔顺变刚度原理,Yu等[30]设计一种无动力变刚度储能外骨骼(图23),该外骨骼通过髋关节处的储能弹簧储存行走过程中髋关节所做的负功,在髋关节做正功的阶段时将能量释放,以辅助穿戴者行走,减少行走过程中的能量消耗。该外骨骼髋关节刚度可手动调节,以适应穿戴者步速和体质量的变化,更好达到助行效果。

图23 无外动力变刚度储能机构[30]
2.3 假肢变刚度康复机构
人类肢体关节呈现变刚度特性,在下一代假肢中引入变刚度功能,可提高人机交互安全性和鲁棒性,并使其更加贴合真实的肢体。
Lemerle 等[31]设计一款变刚度肘关节假肢(图24),在形态、质量和输出性能方面都接近于人体生物力学性能,系统输出函数与人体肌骨模型相似,表明该款假肢关节在运动时会显得十分自然。Glanzer等[32]提出一个准被动踝足假肢(图25)。准被动踝足假肢有助于适应不平坦的地面,并改善坡道上的生物力学性能。这款准被动踝足假肢具有非线性、自定义的扭矩角曲线,在线调节不同运动任务的整体刚度。

图24 变刚度肘关节假肢[31]

图25 准被动踝足假肢[32]
3 存在问题及发展趋势
变刚度驱动机构由于其本质柔顺特性及机械刚度的可调整性,目前已经逐步应用到各类康复机器人中。对目前已有的各类康复机器人变刚度驱动机构优缺点的总结如下。
在结构和加工方面,串联变刚度机构通过调节杠杆支点来改变刚度,刚度变化范围较大,但相应带来机构尺寸大的弊端[33-35];凸轮变刚度机构利用曲线轮廓产生非线性刚度,因此在加工时对轮廓的加工精度要求较高。
在能耗方面,形状记忆合金的复合材料变刚度驱动机构在通断电时刚度会发生变化。但此类驱动机构的刚度特性受到尺寸(如复合材料管的直径、长度)、温度等多个参数的影响,并且由于其靠加热形状记忆合金实现刚度改变,功耗大,响应慢[27]。
在刚度取值范围方面,气动驱动变刚度机构可以提供很高的功率重量比,但它们的刚度太小,不能独立作用于末端执行器,且刚度变化范围有限。基于杠杆原理串联变刚度机构,在理论上可以达到从0~∞的刚度特性[21]。
在刚度响应方面,静电层干扰柔顺变刚度机构由于不需要电机来改变刚度特性,结构小而紧凑,但它需要高达2000 V的电压调整刚度,且刚度变化有滞后现象。
在刚度输出扭矩曲线方面,大多数基于杠杆的变刚度驱动机构,扭矩曲线依赖于杠杆的长度,很难达到理想的渐进式扭矩曲线。而凸轮机构的刚度依赖于弹簧的预压缩量,即使在空载的情况下,用于调整刚度的电机也必须连续输出扭矩,不节能。
新一代的康复机器人对柔顺变刚度关节提出迫切的需求,综合上述变刚度机构的优缺点,康复机器人柔顺变刚度机构在机械上应具备紧凑的结构,良好的刚度特性(输出关节具备较大的转动角和刚度),受到外界环境冲击载荷时能有效缓解瞬间的载荷力,可达到理想的刚度输出扭矩曲线(输出关节可随着转动角的改变实时调节刚度);在控制上应具备良好的稳定性、快速的响应性和较高的精确性,不能产生往复震颤现象,提供更安全、舒适、高效的变刚度康复训练。
4 小结
本文按照驱动机构中变刚度部件的机械结构组成,分为弹性元件柔顺变刚度机构、气动主动柔顺变刚度机构、电-磁柔顺变刚度机构和智能材料柔顺变刚度机构四大类,并分别陈述各类机构变刚度原理,分析了各类变刚度机构特点;随后介绍了变刚度机构在上下肢康复机器人、被动助力下肢外骨骼及智能仿生假肢中运用及重要性;最后对本文中所提到的变刚度驱动机构进行优劣分析。
康复机器人柔顺变刚度驱动机构在与环境互动中能体现固有顺应性,在自然行为方面适应人体关节的机械能力,在康复时能适应患者肢体刚度变化以达到最佳的康复训练效果,因此需要设计具备较大的可调刚度范围、结构紧凑、低能耗、高响应的变刚度驱动机构。
猜你喜欢
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
人大建设(2020年3期)2020-07-27
制造技术与机床(2019年8期)2019-09-03
中学生数理化·八年级物理人教版(2018年6期)2018-06-26
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
新高考·高一物理(2016年10期)2017-07-07
中国卫生(2015年8期)2015-11-12
天津科技大学学报(2015年6期)2015-04-16