基于联合平差的船台测量场标定方法研究
2021-07-03 07:22丰寅帅孟庆旭
舰船科学技术 2021年5期
丰寅帅,彭 飞,王 中,孟庆旭
(海军工程大学 舰船与海洋学院,湖北 武汉 430033)
0 引 言
随着船舶制造行业的不断发展,船舶制造所能达到的精度越来越高,对船舶制造过程中所能达到的测量精度提出了更高的要求,而传统的以捶球和标尺为主的接触式测量方法已经逐渐难以满足当前船舶制造行业的精度需求,因此,以全站仪为主的非接触式高精度测量方法已经在造船现场得到了广泛应用。在目前船舶建造现场的测量作业中,由于船体分段尺寸较大,测量条件复杂[1],在某一固定站位下无法完整获取整个船体分段的尺寸和形状数据[2],以往常见的方法是利用全站仪进行多级转站的形式,通过不断的转移测量站位来获取船体分段多个角度的测量数据,但这种方法速度较慢,并且转站过程本身是带有无法消除的系统误差,会造成测量精度下降等问题。因此,为了减少转站次数,实现船体分段测量数据的统一管理,就需要在船台区域内构建能够覆盖全域的具有统一基准的船台测量场[3]。

图1 船台测量场示意图Fig. 1 Slipway measurement field
如图1所示,船台测量场是以多级转站测量为基础,在船台区域内布置相当数量的公共点,通过多次坐标转换,将不同站位下所测得的公共点坐标统一到一个基准坐标系下。目前,常见的坐标转换算法主要有奇异值分解法[4]、四元数法[5]和正交矩阵法[6],由于坐标转换算法本身就带有一定的误差,且在不同站位所测得的公共点数量可能不同,因此,在将公共点坐标转换至基准坐标系时会引入一定的参数误差,同时,受限于全站仪等测量设备的加工精度,在某一站位下对公共点进行测量时也会引入一定的测量误差,进一步加大了船台测量场的整体误差。为了解决此类问题,就需要对船台测量场进行标定,目前常见的方法是基于最小二乘原理[7-9],对转站测量得到的公共点坐标进行平差计算,从而得到满足误差最小时的坐标转换参数。近年来,国内外学者对采用平差计算方法进行了大量的研究,Schaffrin[10-12]利用拉格朗日函数构建了平差模型,并进一步推到得到了加权整体最小二平差算法;Calikins[13]和Meid[14]则是通过对测量现场的不确定度进行研究,给出了一种基于光束平差法的误差处理方法;何荣基基于间接平差原理,给出了自由设站测量时含约束条件的平差模型。但上述研究大多是针对单次测量或单级转站所开展的,而对于船台测量场构建时的多级转站过程,相关的研究还相对较少。
为了对利用多级转站方法构建船台测量场时公共点的最优坐标转换参数进行求解,本文采用一种基于最小二乘原理和公共点经过多级转站后返回原站位坐标不变原则的联合平差算法,并通过构建拉格朗日函数得到平差值的求解方法,实现了船台测量场公共点位置误差的最小化处理。通过模拟实验,对此方法的有效性和精度进行了验证。
1 误差方程及其求解方法
1.1 误差方程
根据误差理论和测量平差原理[15-16],在利用多级转站方法构建船台测量场时,公共点的残余误差方程可以写为:

在转站测量中,V为转站后公共点坐标的误差矩阵;A为 误差方程的系数矩阵;为转站参数误差矩阵;L为公共点的经过转站后的坐标和测量坐标的偏差。
当转站测量时公共点误差最小时,V取最小值,同时,满足最小值,式中,为公共点坐标的权值矩阵。
1.2 误差方程的求解方法
由坐标转换模型可知,在公共点由第j站转至第j+1站时,有

式中:j和j+1分别公共点的坐标数据在第j站和第j+1站测量得到;kj,Rj和Tj分别代表公共点坐标从第j站转至第j+1站时的尺度参数、角度参数和距离参数。其中,公共点在转站前后相对位置不变,故kj取值为1,坐标转换原理和欧拉角理论,角度参数可表示为Rj=RXj·RYj·RZj,对应角度分别为 αj,βj, γj,距离参数可表示为:

在船台测量场中,对于某一个公共点在j+1站的坐标,其位置误差可以表示为其真实坐标和测量值的差值,即

对式(4)作泰勒展开,并与式(1)联立,可以得到:



式中,为第i个公共点在第j站的测量坐标初值,分别为第i个公共点从第j站转至第j+1站的平移参数,分别代表第i个公共点在第j+1站的真实坐标初值。
2 约束条件方程及其求解方法
2.1 约束条件方程
在转站过程中,同时满足公共点在第1站的坐标在经过多次转站后,当其转回第1站时,坐标不变,即
若式(7)成立,则有
式(8)和式(9)即为约束条件方程。
2.2 约束条件方程的求解方法
在平差计算时,可将约束条件方程写成如下形式:

对式(10)作泰勒展开,可得:

令

则式(12)可写成如下形式:

文献[17]对式(13)的线性化处理方法进行了详细阐述,并得到了对应参数的具体表达形式。
3 平差值的求解方法
根据约束条件方程构建拉格朗日函数:

的参数矩阵。
求偏导,设此时 Φ的偏导数为零,则 Φ有极小值,即此时误差最小,则

经整理,可得:

将式(1)代入,可得:

令

则式(18)可以写成


令

则式(20)可写成

则有

将式(23)代入式(18),可得:

同时,未加约束条件的平差值经整理,可以表示为:

4 实验验证
本次实验在船台测量场的基础上,对确定公共点在基准坐标系中位置的转站测量过程进行了模拟,对利用联合平差算法对所测得的公共点坐标数据进行处理,并通过与未进行联合平差的结果进行对比,对基于联合平差的船台测量场标定方法进行验证。
4.1 实验过程
1)在实验场地内的不同位置共布设22个公共点,在第1测量站位架设全站仪,为了对船台测量场的实际情况进行模拟,各站位所测得的公共点数量均不相同,每个公共点测量10次。
2)将全站仪转移至下一站位,重复过程1,直至测完6站,并对测量数据进行记录。
4.2 实验结果
在本次实验中,采用每一测站下每个公共点10次测量数据的平均值作为当前站位的测量坐标,同时,将相邻的两站两两组合,利用坐标转换算法对角度参数R和距离参数T进行计算,共得到6组数据。
利用联合平差算法对测量数据进行处理,其中,平差初值为通过计算得到的6组坐标转换参数,约束条件方程根据公共点在第1站的坐标进行一轮坐标转换后返回第1站时与原坐标的差值最小列出,并设置迭代计算时角度阈值为1″,距离阈值为0.1mm。最后,将经过联合平差处理得到的中误差和坐标转换参数与未经过联合平差处理的数据进行对比。
表1为在经过联合平差计算前后,所用站位所测得的公共点经过坐标转换统一至第1站的坐标数据。表2和表3分别表示不同转站过程的测量数据,在经过联合平差计算前后坐标转换参数误差的对比。从表中数据可以看出,公共点的测量数据经过联合平差计算后,其坐标转换参数误差整体小于联合平差计算前的坐标转换误差。还可以看出,在进行联合平差前后,其坐标转换参数误差的差值较小,这是因为在本次实验中,每一站为所测的公共点数量较多,并且每个公共点的坐标值均是10次重复测量取平均得到,公
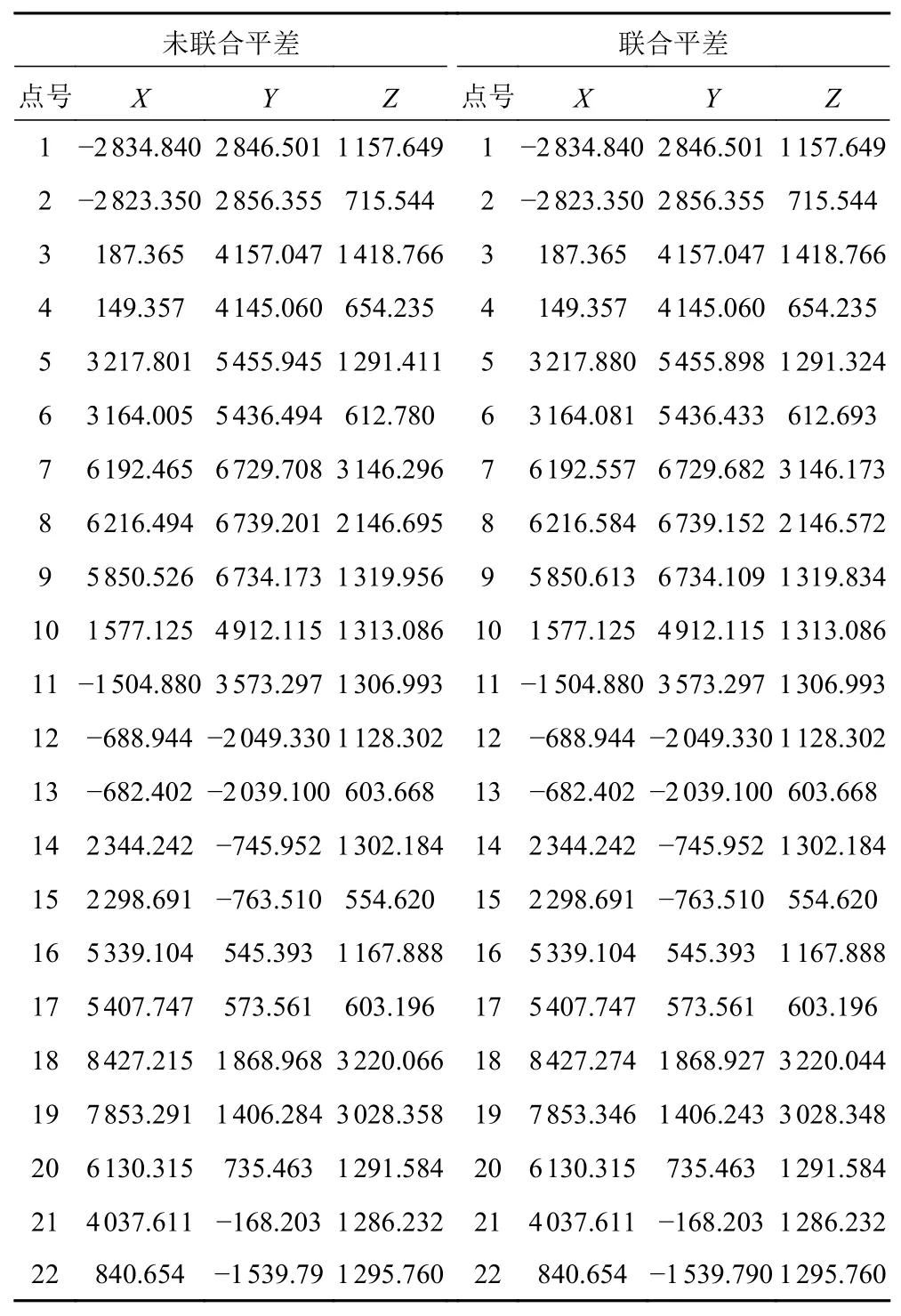
表1 联合平差前后的公共点坐标Tab. 1 Coordinates of common points before and after joint adjustment

表2 未经联合平差的转站参数误差Tab. 2 Transformation parameter errors without joint adjustment

表3 联合平差后的转站参数误差Tab. 3 Transformation parameter errors after joint adjustment
共点测量坐标本身所带有的测量误差较小,因此,坐标转换参数误差较小,其差值也较小。表4为在经过联合平差前后,第6站的公共点坐标在经过一轮坐标转换后,返回至第6站时的坐标与原坐标的差值,由表中数据可以看出,在经过联合平差之后,第6站公共的坐标经过坐标转换返回至第6站后与原坐标的差值更小,进一步说明了利用联合平差算法对公共点坐标进行处理可以有效提升船台测量的整体精度。

表4 联合平差前后第6站的坐标差Tab. 4 Coordinate difference of 6th station before and after joint adjustment
5 结 语
在利用多级转站的测量方法构建船测量场的过程中,由于公共点测量误差和坐标转换算法误差的存在,会导致不同站位所测得的公共点坐标统一至基准坐标系后与其真实空间位置产生一定的偏差,从而影响船台测量场的精度。本文采用联合平差算法实现了多级转站时最优坐标转换参数的求解,该方法基于最小二乘原理和误差最小原则,给出了船台测量场公共点经过多级转站测量的误差方程及其求解方法,并根据公共点经过坐标转换返回原站位坐标不变的原则,给出了对应的约束条件方程及其求解方法。最后,根据拉格朗日函数,得到了平差值的求解方法。实验证明,本文所提出的船台测量场联合平差标定算法有效减少了船台测量场的误差,提高了利用船台测量场进行测量作业的精度。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
水上消防(2021年3期)2021-08-21
人大建设(2019年5期)2019-10-08
人大建设(2019年3期)2019-07-13
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23
课程教育研究(2017年37期)2017-10-20
科技与创新(2014年8期)2014-07-17