基于北斗-RTK的无人插秧机自动导航关键技术应用研究
2021-07-01 10:13:06姜宽舒高菊玲于泓王艳莉张丰山何成勇张善龙
江苏农业科学 2021年10期
关键词:北斗
姜宽舒 高菊玲 于泓 王艳莉 张丰山 何成勇 张善龙


摘要:随着科技的发展,农业正在向着自动化、智能化、无人化的趋势发展。而农村劳动人口外流,劳动力日益短缺和人工成本增加的现象也日益严重,寻求新型高效的农业机械作业方式迫在眉睫。基于北斗导航系统对传统的机械式插秧机进行自动化改装,通过安装北斗-实时动态(RTK)天线和电动方向盘,利用角度传感器和位置传感器,配合比例-积分-微分(PID)模糊控制导航算法,实现插秧机的路径规划和自动导航作业。基站将经过差分的卫星信号通过通讯模块传递给无人插秧机,实现精确的厘米级定位。使用自动导航插秧机进行水田作业试验,系统试验结果表明自动导航模式下插秧机在转弯与直行时偏离航道的最大误差分别为10.2、5.1 cm,基本符合实际作业的精确度和安全性要求。研究结果可为今后开展智能无人化农机装备的改装和研发提供理论和实践参考。
关键词:北斗-RTK;无人插秧机;自动导航;农机装备;PID模糊控制
中图分类号: S223.9 文献标志码: A 文章编号:1002-1302(2021)10-0187-04
我国作为农业大国,拥有1.5亿hm2基本农田,每年有大量的耕、种、管、收等农机作业需求。无人化智能农机可大幅度提高农业劳动生产率、资源利用率和土地产出率,成为当今世界现代农业发展的重要方向和必然选择[1-2]。农机的自动导航技术能够将农机操纵者从长时间枯燥的驾驶任务中解放,避免因为疲劳造成的安全问题,同时可以有效提高整体作业过程中的精度和工作效率,对我国智能化精准农业的发展有巨大的推动作用[3-4]。
插秧机相比于其他农机最大的不同是其工作环境,水田的路面不平整会导致插秧机在行驶过程中产生侧滑或偏移,单独使用卫星定位会产生较大误差[5-6]。本研究以农业中的插秧过程为对象,对现有的机械式插秧机进行自动化改装,保证插秧机在无人驾驶的情况下能够依靠惯性导航传感器信息和基于实时动态(RTK)定位技术的北斗卫星信息获取车体当前的位置、速度、航向、姿态,当其偏离预定义路径时,能依靠控制器中的路径跟踪策略及时转向减少误差。通过田间性能试验,确定改装后的无人插秧机自动导航功能的准确性,以期为今后開展智能无人化农机装备的改装和研发提供理论和实践参考。
1 材料与方法
1.1 导航控制系统
北斗卫星导航系统,是我国自主研制、独立运行的导航系统。北斗由35颗卫星组成,包括5颗静止轨道卫星和30个非静止轨道卫星。2019年6月,在轨46颗,三号21颗,基本系统完成,提供全球服务[7]。目前北斗定位精度为10 m,通过北斗地基增强系统的辅助定位,能够实现动态亚米级、分米级、厘米级,静态毫米级高精度定位。
北斗-RTK无人插秧机的自动导航硬件包括北斗RTK定位系统和转向执行系统2个方面。定位和导航原理是基站将经过差分的卫星信号通过通讯模块传递给无人插秧机,实现精确的厘米级定位,通过角度传感器和位置传感器驱动电机带动电动方向盘转动,从而进行航线规划和自主巡航。北斗-RTK定位原理如图1所示。
1.1.1 北斗-RTK接收机的安装 卫星定位接收机选用上海华测导航技术股份有限公司生产的高精度NX300,该套设备是由2个接收机、2个数传电台和2个天线以及部分连接束组成。其中,一个接收机安装在插秧机上作为移动站,另一个接收机放在地头作为RTK基站以实现差分定位,现场图如图1所示。该设备最大的优点在于它的可重复性,它能够消除卫星定位过程中产生的漂移误差,在消除卫星定位累积漂移后,插秧机就能一次又一次地沿着同一路径进行引导。另外,该接收机集成了定位模块、速度传感器和倾角传感器,能够对接收到的卫星信号进行解算并发送接收机的经纬度、俯仰角、高度、速度、航向角和横滚角等导航信息。
1.1.2 自动转向系统 本研究所采用的自动转向设备是南京天辰礼达电子科技有限公司生产的电动自动方向盘,该电动自动方向盘由步进电机、链轮链条、编码器、固定套装和安装支撑架组成。其基本工作原理是步进电机作为驱动源带动小链轮转动,小链轮通过链条带动大链轮同向转动,由于大链轮与方向盘固定在一起,所以方向盘在动力的作用下就可以进行转动,从而实现插秧机转弯。插秧机上加装有监测主变速手柄角度的变化、转轴转过的角度以及方向盘转动的角度的传感器,控制电机驱动方向盘和静液压传动系统(HST)拉杆,从而实现无人驾驶(图2)。
1.2 插秧机导航控制方法研究
基于插秧机的自动导航技术主要包括导航传感器、导航控制算法、路径规划以及插秧机的模型建立等,其中导航控制算法是决定插秧机导航精度的关键因素之一。须设计一种合理的导航控制算法,以满足插秧机在田间的直线作业行驶和曲线掉头转向行驶要求。
1.2.1 插秧机自动导航控制原理 插秧机自动导航控制的目的是使插秧机能按照规定的预定义路径实现自动行驶。导航决策的基本过程是通过安装在插秧机上的北斗-RTK设备、速度传感器、倾角传感器等各个传感器设备来获取插秧机的实时运动参数,并将插秧机的实时位置信息和航向信息与预定义路径相比较,当检测到插秧机的行驶路径与期望路径有偏差时,导航控制算法解算出此时的偏差信息(包括横向偏差和航向偏差),然后将这些偏差信息输入到导航决策控制器中,并解算出期望的前轮转角,将该转角信息发送给转向控制器,由转向执行机构做出相应的调整来控制插秧机前轮转向进行实时跟踪期望的前轮转角,以达到减小偏差的目的,从而实现插秧机的自动转向(图3)。
航迹控制是指目标轨迹随着插秧机的运动发生变化,在轨迹控制过程中将其目标轨迹与航行目标轨迹实时进行对比,获取距离偏差,通过控制电动方向盘消除航向偏差和控制速度消除距离偏差。如图3所示,航迹控制采用双闭环控制模式,用一个闭环控制航向,另一个闭环控制航速。当对插秧机进行航迹控制时,通过系统携带的惯性导航系统获得插秧机的实时位置(x0,y0)和航向信息,同时通过地面监控站获得系统给定的目标航迹(xr,yr) 。计算可得到当前位置与目标航迹的距离偏差η和航向偏差Δψ。通过双闭环控制的方式将航向控制和位置控制相互分离达到有效行进轨迹控制的目的。
1.2.2 比例-積分-微分(PID)模糊控制 自20世纪30年代PID控制算法产生以来,由于该方法具有多功能性、高可靠性和易操作性,一直是工业控制领域的一种重要手段[8-9]。在农用无人插秧机导航控制实际应用方面,经典PID控制依然占据主导地位。以轨迹控制为例,无人插秧机标准PID控制器原理结构框如图4所示。
由此可见,无人机插秧机航向控制的输入量由给定量和测量量的偏差Δψ做比例、微分、积分处理后求和得到。比例环节的作用是加快系统的响应速度,同时也保证系统对干扰的灵敏度;积分环节的作用是消除静态误差,达到无静差跟踪;微分环节的作用是保证闭环系统的稳定性。在采用PID控制过程中,通过调节这3个参数来调节系统的性能。
PID参数整定是控制器设计的关键,整定的方法包括试凑法、衰减曲线法、临界比例法、Z-N法等,通过这几种方法进行PID参数整定都需要一定的经验。其中,衰减曲线法是大量工程人员在试验的过程中总结出了一套简单有效的PID参数整定方法。首先由小到大对比例放大系数进行调节,使系统达到衰减比为4 ∶ 1的过渡过程。记录比例调节参数Kp1和振荡周期Ts1,然后根据表1中参数整定方法获取PID参数。
1.3 田间试验
由于插秧机在田间的实际作业环境非常复杂,受干扰因素较多,理论研究和仿真分析并不能真实地反映实际情况。为了验证理论研究的正确性和设备自动导航有效性,在前面研究的基础上进行插秧机水田路径规划行驶试验。
1.3.1 试验场地 为了验证插秧机路径规划控制系统的实际使用性能,即导航控制性能,2020年5月10日,在江苏农林职业技术学院禾木农博园实训基地(119°25′58″E,32°24′51″N)进行水田试验,试验现场如图5所示。试验水田为标准化农田,大小为200 m×300 m。
1.3.2 试验方法 将接收机的一整套装备及自动方向盘固定安装在井关插秧机上,首先人工驾驶插秧机沿着试验地块的长边界行驶一段直线距离以确定插秧机的作业方向,然后将插秧机开到起始位置,打开天辰礼达路径规划控制系统并设置插秧机的作业参数(作业地块的尺寸、行间距、地头预留间距等),然后触发路径规划生成按钮即可获得该地块内的规划路径,最后通过导航控制系统来对插秧机进行控制,使其实现自动导航。
2 结果与分析
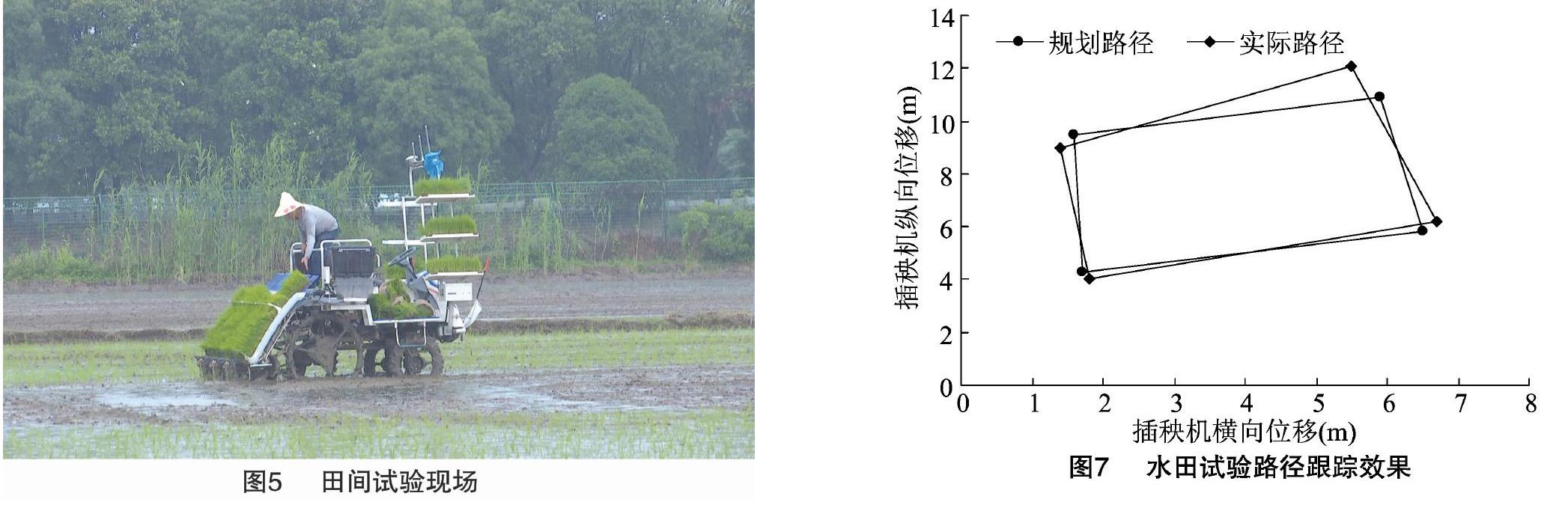
如图6所示,从车轮轨迹可看出插秧机在进行直线导航时能够保持较好的直线度,只有在转弯的时候车轮轨迹与预定义路径偏差比较大,但总体看来插秧机的导航效果比较理想。从图7中可以看出,插秧机的规划路径与预定义路径的重合度在直线段较高,在转弯段有稍微偏差。路径跟踪的平均误差为4.3 cm,最大跟踪误差为10.2 cm,最大跟踪误差出现在插秧机转弯过程中,但直线作业段路径跟踪的平均误差为3.6 cm,最大跟踪误差为 5.1 cm。由于插秧机在进行田间作业时,只有在直线段进行插秧,转弯段不进行插秧,所以转弯误差对插秧机的实际作业效果影响不大。又由于直线路径跟踪误差在插秧机作业时允许的误差范围内,表明该导航控制算法及自动化改装具有良好的导航效果。
3 结论
随着科技的发展,农业正在向着自动化、智能化、无人化的趋势发展。农机的自动导航技术能够将农机操纵者从长时间枯燥的驾驶任务中解放出来,避免因为疲劳造成的安全问题,同时可以有效提高整体作业过程中的精度和工作效率,对我国智能化精准农业的发展有巨大的推动作用。本研究基于北斗导航定位系统对传统的机械式插秧机进行了自动化改装,通过安装北斗-RTK天线和电动方向盘,利用角度传感器和位置传感器,配合PID模糊控制导航算法,实现插秧机的路径规划和自动导航作业。基站将经过差分的卫星信号通过通讯模块传递给无人插秧机,实现精确的厘米级定位。使用自动导航插秧机进行了水田作业试验,系统试验结果表明自动导航模式下插秧机在转弯与直行时偏离航道的最大误差分别为10.2、5.1 cm,基本符合实际作业的精确度和安全性要求。可以为今后开展智能无人化农机装备的改装和研发提供理论和实践参考。
参考文献:
[1]黄国勤. 当前中国农业发展面临的问题及对策[J]. 农学学报,2014,4(1):99-106.
[2]杨 慧. 我国农业可持续发展存在的问题及对策[J]. 现代农业科技,2011(7):371-372.
[3]陈锡文. 农业和农村发展:形势与问题 [J]. 南京农业大学学报(社会科学版),2013,13(1):1-10,29.
[4]陈旭君,王承祥,朱德泉,等. 基于YOLO卷积神经网络的水稻秧苗行线检测[J]. 江苏农业学报,2020,36(4):930-935.
[5]贾 全. 拖拉机自动导航系统关键技术研究[D]. 北京:中国农业机械化科学研究院,2013:24-26.
[6]郭刘粉. 基于GPS导航插秧机的路径规划研究[D]. 杭州:浙江理工大学,2017:10-87.
[7]刘 琳. 北斗/GPS双模差分定位技术的研究及实现[D]. 北京:北京交通大学,2013:4-8.
[8]周建军,张 漫,汪懋华,等. 基于模糊控制的农用车辆路线跟踪[J]. 农业机械学报,2009,40(4):151-156.
[9]Mousazadeh H. A technical review on navigation systems of agricultural autonomous off-road vehicles[J]. Journal of Terramechanics,2013,50(3):211-232.
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
当代陕西(2019年18期)2019-10-17 01:48:50
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年3期)2016-07-12 09:58:47
太空探索(2016年7期)2016-07-10 12:10:15