
地铁隧道中全站仪自动化监测控制网布设及复测技术研究
2021-07-01 02:24:00贾文超张齐莫爵同
广东建材 2021年6期
贾文超 张齐 莫爵同
(广东省工程勘察院)
0 前言
随着我国城市化进程的不断发展,地铁已发展为城市公共交通的主动脉,但在地铁运营过程中,随着隧道建成年限的增加,由于区域性地面沉降、土层纵向的不均匀性、隧道周边基坑开挖、隧道渗漏、列车荷载等因素的影响,隧道变形会持续增大,从而影响地铁的正常运行、乘客乘坐的舒适性。而严重的不均匀沉降将直接造成地铁本身结构的变形,甚至引发安全性问题[1-3]。不间断涌现的地铁隧道变形问题引起地铁运营单位及交通主管部门的重视,因此通过科学合理的方法对隧道变形进行监测具有重要的理论和实践意义。相较于传统的监测手段,基于高精度全站仪自动化监测在地铁隧道监测中得到了较快发展。因隧道狭窄环境下仪器通视条件并不理想及实施成本所限,自动化监测中基准点一般布设在距离变形区域30m~50m的范围上,但外部施工影响地铁隧道的变形较为复杂,自动化监测中基准点布设区域亦有可能发生变形,导致监测数据失真,无法真实反映变形情况。
为了解决地铁隧道中全站仪自动化监测基准点稳定性问题,张正禄等[4-5]均利用工程实例对比了组合后验方差法、平均间隙法、分块间隙法等在其上的优劣性,验证了组合后验方差法的实用性;陈刚等[6]分析了平均间隙法、T检验法、限差法在不同自由度的隧道沉降监测网中稳定性判别方法;刘冠兰[7]将自动化监测中基准点的误差看作为随机信号,以最小二乘原理求解测站点自由设站问题对基准点进行统计检验以分析其稳定性。
国内对地铁隧道全站仪自动化监测的基准点稳定性判断方法大多为“内复核”,但在外部施工影响既有线变形监测中,常因基坑降水等导致实际变形区域大于监测区域,甚至涵盖自动化监测的基准点布设区域,因此可能出现基准点布设区域与自动化监测区域发生同步变形,导致基准点稳定性分析失效。本研究基于工程实例,提出在地铁隧道中全站仪自动化监测基准点向两端挪移300m~500m以延申控制网布设范围,将原有自动化监测基准点视为相对稳定的工作基点,并通过边角后方交会和网平差对工作基点坐标进行复核以判断工作基点的稳定性,同时根据广州地铁长期运营监测数据提出基准点布设区域选取原则,以供工程实践参考。
1 全站仪自动化监测原理
全站仪自动化监测采用极坐标法观测,仪器设置在变形区域中,将观测后的自动化监测工作基点、监测点的坐标与初始观测基准进行坐标转换,各监测点通过坐标转换后的差值关系计算变形量,极坐标法观测原理如图1及式⑴所示。

图1 全站仪极坐标法观测示意图

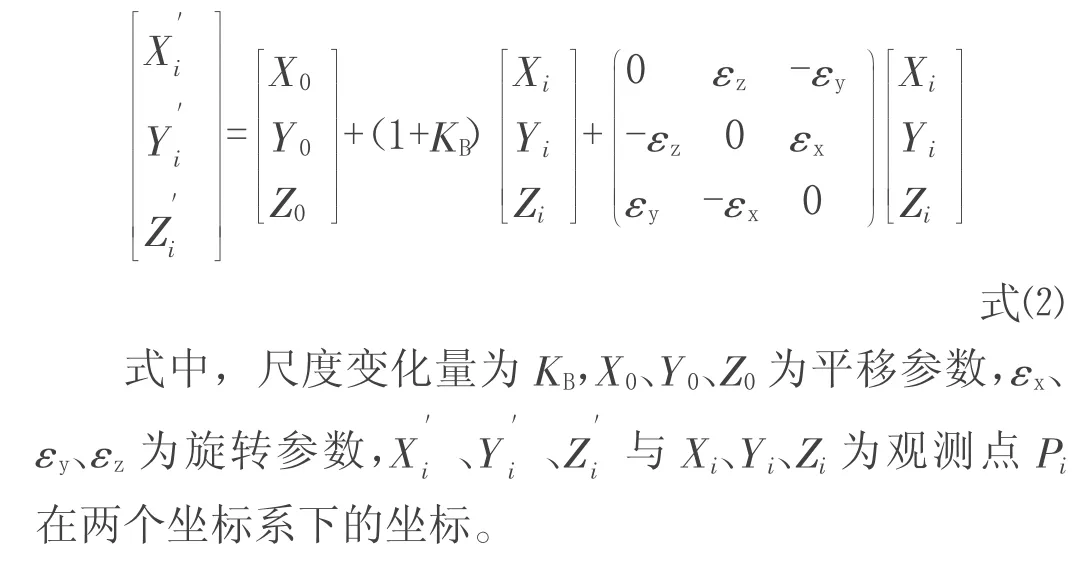
每次观测均通过设置在变形区域两端的工作基点作为同名点进行坐标转换,参数转换则需要建立布尔莎七参数坐标转换模型,即本次观测与初始观测之间存在三个平移参数、三个旋转参数、一个尺度参数。观测点Pi在两个坐标系下的转换关系如式⑵所示[8-9]。
2 地铁隧道中全站仪自动化监测控制网建网
2.1 控制网基准点布设
全站仪自动化监测控制网建网借鉴高铁CPⅢ控制网建网方式,采用自由设站后方交会的原理,通过对广州地铁长期运营监测数据分析及相关要求定出自动化监测基准点选取原则:
⑴控制网基准点应布设在变形区域两端,且应远离自动化变形区300m以外;
⑴基准点布设区域内运营监测点满足一年内年沉降速率不超过0.01mm/d,且隧道累计沉降不小于-5mm或大于+3mm;
⑶该段隧道结构状态良好,无外部施工、堆(卸)载等情况;
⑷控制网基准点应前后、上下交错5~10m布置,且布设在可靠稳定且不易破坏的位置。
2.2 CPⅢ控制点布设
CPⅢ控制点布设在可靠稳定且不易破坏的位置,埋设于隧道侧壁,为满足控制网复测要求,控制网网点在《城市轨道交通工程测量规范》GB50308的基础上加密布设,其纵向间距宜为40~60m,横向间距为隧道结构宽度,左右对称布设于隧道两侧。CPⅢ控制点建议采用强制对中的棱镜预埋件,并利用大力士胶及固化剂将其钻孔埋设于隧道侧壁上,棱镜预埋组件可自由拆卸、前后转动棱镜,其点位中误差为0.4mm。见图2。

图2 插入圆棱镜的CPⅢ控制点
2.3 自动化监测工作基点布设
自动化监测工作基点设置在自动化监测区域外侧30~50m左右的位置,在保证仪器通视的情况下,沿隧道上下、前后交错布设,一端宜设置3~4个工作基点,工作基点采用L型小棱镜布设。见图3。
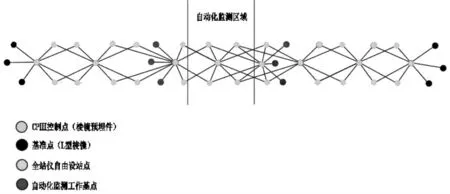
图3 自动化监测控制网网型
3 地铁隧道中全站仪自动化监测控制网稳定性分析
3.1 控制网测量及平差原理
对于自由设站边角后方交会控制网平差,一般采用间接平差法,即以自由设站点坐标和待求点坐标作为未知数,以观测的距离和方向列出误差方程,经平差后求解未知参数,其误差方程如式⑶所示[10]。
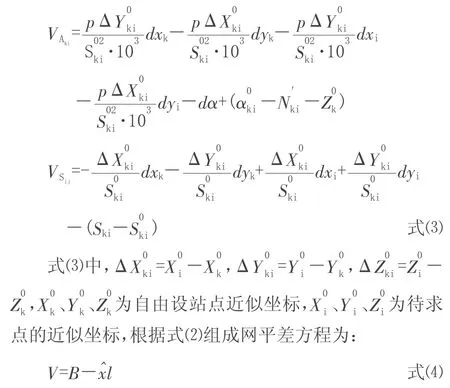
平差时对式⑶按最小二乘原理求出观测值改正数,对得到的概略坐标加上改正数即为最后的平差结果,在本文控制网复测中,设置在两端的6个基准点为已知点,CPⅢ控制点及自动化监测工作基点为待求点,第一个测站观测3个基准点并进行后方交会求得测站点坐标后,通过极坐标法观测得到CPⅢ控制点坐标,依次进行自由设站推算其他CPⅢ控制点及自动化监测工作基点坐标。
如图3所示,全站仪自动化监测控制网为以基准点、CPⅢ控制点、自动化监测工作基点建立的自由设站边角交会网,控制网复测采用间接平差原理,控制网测量及平差合格后将工作基点坐标与初始坐标进行对比,判断其是否稳定,控制网复测及自动化监测工作基点稳定性判断过程如图4所示。

图4 控制网复测及自动化监测工作基点稳定性判断流程
3.2 工作基点稳定性分析判断标准
当控制网复测合格即可通过工作基点两期坐标差值对其稳定性作出判断,主要方法采用《建筑变形测量规范》(JGJ8-2016)中限差法的判断规定[11],当计算所有两期高差值及两期坐标差值均不大于按下列公式计算的限差时,可认为自动化监测设置的基准点稳定。

式中:δ为高差差值限差或位移差值限差,μ为对应精度等级的相邻基准点高差中误差或位移中误差,η为观测站数。
4 基于工程实例的控制网复测精度分析
以广州地铁3号线段自动化监测为例进行布网及复测分析,利用商业平差软件COSA对自由设站点求解坐标改正数及点位中误差,其数据如表1所示。

表1 自由设站点平差结果
对自动化监测工作基点GZJD1进行人为调整,再次进行复测检验GZJD1稳定性,检验统计见表2。
从表2中可以分析,各自由设站点坐标改正数较小,点位中误差最大为0.62mm,均在1mm以内,结果表明在地铁隧道中布设的自由设站边角后方交会控制网精度可靠,通过人为调整GZJD1的位置再进行复测后发现可快速计算出GZJD1两期位移差值为16.71mm,大于限差5.66mm,由此判断GZJD1为动点。

表2 GZJ D1稳定性分析
5 结语
不同于常用的平均间隙法、限差法、统计检验法等内复核的稳定性分析方法,本研究提出全站仪自动化监测沿变形区域两侧延伸300~500m布设自由设站边角后方交会控制网,用以判断自动化监测工作基点的稳定性。该方法相对于其他稳定性分析方法具有工程实用性,通过复测合格后的工作基点坐标差值可以快速识别自动化监测工作基点是否稳定。
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
现代测绘(2021年1期)2021-04-28 10:19:56
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
电测与仪表(2016年9期)2016-04-12 00:29:52
河南科技(2014年5期)2014-02-27 14:08:32
全球定位系统(2010年2期)2010-07-18 03:49:58
山西建筑(2010年13期)2010-07-17 11:24:02
