空基反助推段导弹制导技术综述
2021-07-01 06:03荆武兴高长生
哈尔滨工业大学学报 2021年6期
荆武兴,杨 彪,高长生
(哈尔滨工业大学 航天学院,哈尔滨 150090)
根据弹道导弹的飞行特性,导弹防御系统主要分为助推段拦截、中段拦截和末段拦截3种方式,如图1所示.中段拦截和末段拦截技术研究较早,现在已经相对成熟,相应的拦截弹已经列装,如美国陆基中段拦截弹和THAAD拦截弹.助推段拦截对技术要求较高,但具有独特的拦截优势,逐渐受到各国的关注[1-2].相对于中段和末段拦截,助推段拦截主要具有以下特点[3]:1)弹道导弹在助推段飞行时尾焰特征明显,有利于实现快速预警和稳定跟踪;2)在助推飞行阶段,多弹头和诱饵等还未分离,可以通过一次拦截实现完全摧毁;3)未完全摧毁情况下,残留物落在发射方附近,不会对拦截方造成破坏;4)在导弹助推阶段及时对其实施拦截可以增大保护范围;5)目标助推段飞行时处于加速阶段,速度相对较小,有利于拦截;6)助推段拦截失败后还可以在目标飞行中段和末段实施拦截,提高防御系统的整体拦截概率.
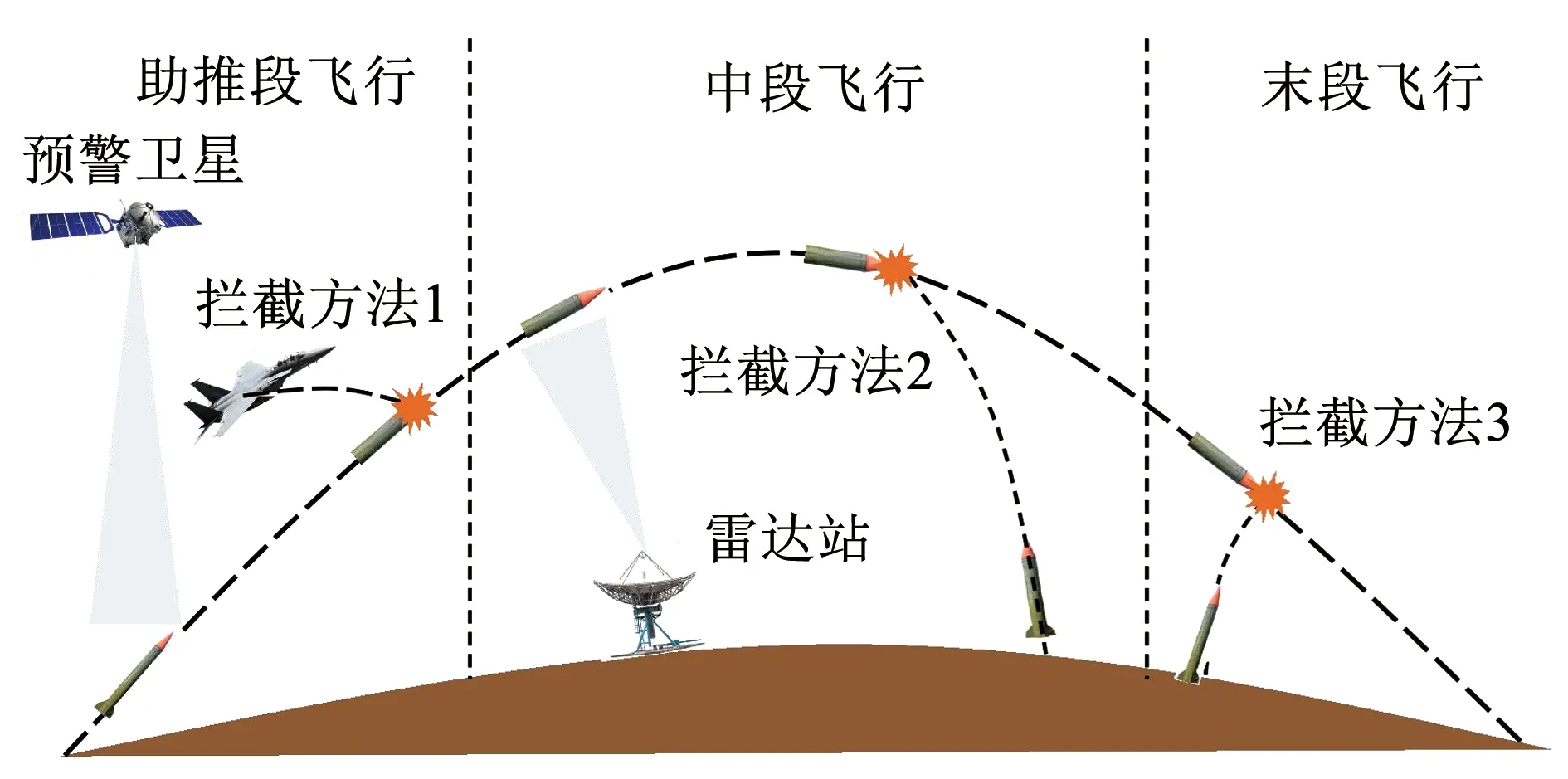
图1 导弹防御过程示意
目前助推段拦截的具体方案主要有3种,分别是机载激光器方案[4]、空基拦截弹方案[5]以及地基动能拦截弹方案[6].与空基拦截弹不同的是,机载激光器方案主要难点是大功率激光器小型化问题[7];地基拦截弹部署不灵活,拦截弹体积质量较大[8],本文不做深入讨论.空基拦截弹方案主要具有以下优势[9]:1)空基发射拦截弹具有一定的初始速度和高度,和地面发射方式相比,受稠密大气影响较小,具有更大的拦截射程和最大速度;2)相对于地面发射阵地,空基发射平台部署更为灵活,反应能力快,可以根据目标的发射地点进行快速调整,适用于抵近发射后迅速撤离;3)空基发射的拦截弹成本较低,不需要地面固定发射阵地的部署与维护,方案整体的经济性更好;4)空基发射平台可以挂载多个拦截弹,也可以多个空基平台同时拦截一个目标,会提高拦截成功率.
空基助推段拦截方案具有众多优势的同时也面临着众多挑战,体现在预警、跟踪、预报、制导等多个方面[10-12].制导技术直接关系到拦截弹能否精确摧毁处于助推段飞行的目标,本文主要对其展开研究分析.
1 空基反助推段技术发展现状
1.1 空基反助推段系统发展现状
随着助推段拦截受到越来越多的重视[13],一些国家开展了空基反助推段系统的研究,已有多种拦截系统方案被提出.目前国内关于空基反助推段导弹系统方案的报道还很少,下面具体介绍国外4种空基反助推段系统方案.
1.1.1 网络中心机载防御单元系统
网络中心机载防御单元(Network Centric Airborne Defense Element,NCADE)系统由美国导弹防御局投资,雷神公司负责研制,用于拦截处于助推段飞行的弹道导弹目标.NCADE系统主要由预警跟踪系统、载机系统、拦截弹系统、信息传输系统组成,利用天基、空基和地基三位一体的预警指挥体系对助推段目标拦截作战进行指挥控制[14].
当弹道导弹目标发射后,NCADE系统可以通过天基预警卫星或目标附近的预警机进行预警,然后利用目标的尾焰特征对其实现稳定跟踪,获得目标轨迹的预报信息,将其传输给附近空域的载机平台.载机平台制定拦截决策,快速解算拦截弹的发射诸元,然后进行发射.拦截弹发射后通过数据链与载机进行联系,根据载机传输的指令进行制导飞行.末制导阶段利用动能碰撞摧毁目标.可以对高度为20~80 km,距离150 km内的助推段飞行目标实施拦截.NCADE系统作战示意图如图 2所示.

图2 NCADE系统作战流程示意
2007年12月,雷神公司在白沙靶场对NCADE系统进行了首次飞行试验[15].飞行试验中利用F-16战斗机挂载NCADE拦截弹对猎户座靶弹进行拦截,拦截弹成功识别并跟踪目标,最终实现直接撞击摧毁目标.
1.1.2 空射撞击杀伤系统
空射撞击杀伤(Air-Launched Hit-to-Kill,ALHTK)系统是美国导弹防御局的另一项空基反助推段方案,也是由载机空中发射拦截弹对目标实施摧毁.与NCADE不同的是,ALHTK系统的方案直接将符合条件的地空导弹进行机载发射实现拦截.这种方案可以减少设计和维护成本,缩短研发周期,实现载机和拦截弹的多任务场景使用.
ALHTK系统由洛克希德·马丁公司进行研制,2006年开始进行初始论证,主要评估将地空导弹进行机载发射的风险与可行性[16].拦截弹计划采用爱国者-3(PAC-3)防空导弹和战区末段高层防御系统(THAAD)拦截弹,载机计划采用F-15、F-16、F-35和F-22.
2007年首先开展将PAC-3导弹集成到F-15战斗机平台进行发射的研制工作.作战过程如图 3所示.F-15战斗机挂载PAC-3导弹进行空中巡逻.当预警卫星发现目标发射升空后,附近的PAC-3系统雷达进行跟踪.地面指挥控制系统通过目标轨迹预报计算出预测拦截点后,通知战机飞向指定位置和方位,同时通过数据链对拦截弹进行诸元装订.之后战机发射机载的PAC-3导弹,地面指挥控制系统利用雷达和数据链对PAC-3导弹的飞行进行指令修正.当目标进入拦截弹导引头视场时,导引头开机对目标进行跟踪,拦截弹开始末制导,对目标实施动能拦截.PAC-3的最大拦截距离为40 km,进行机载发射后会有所提升.
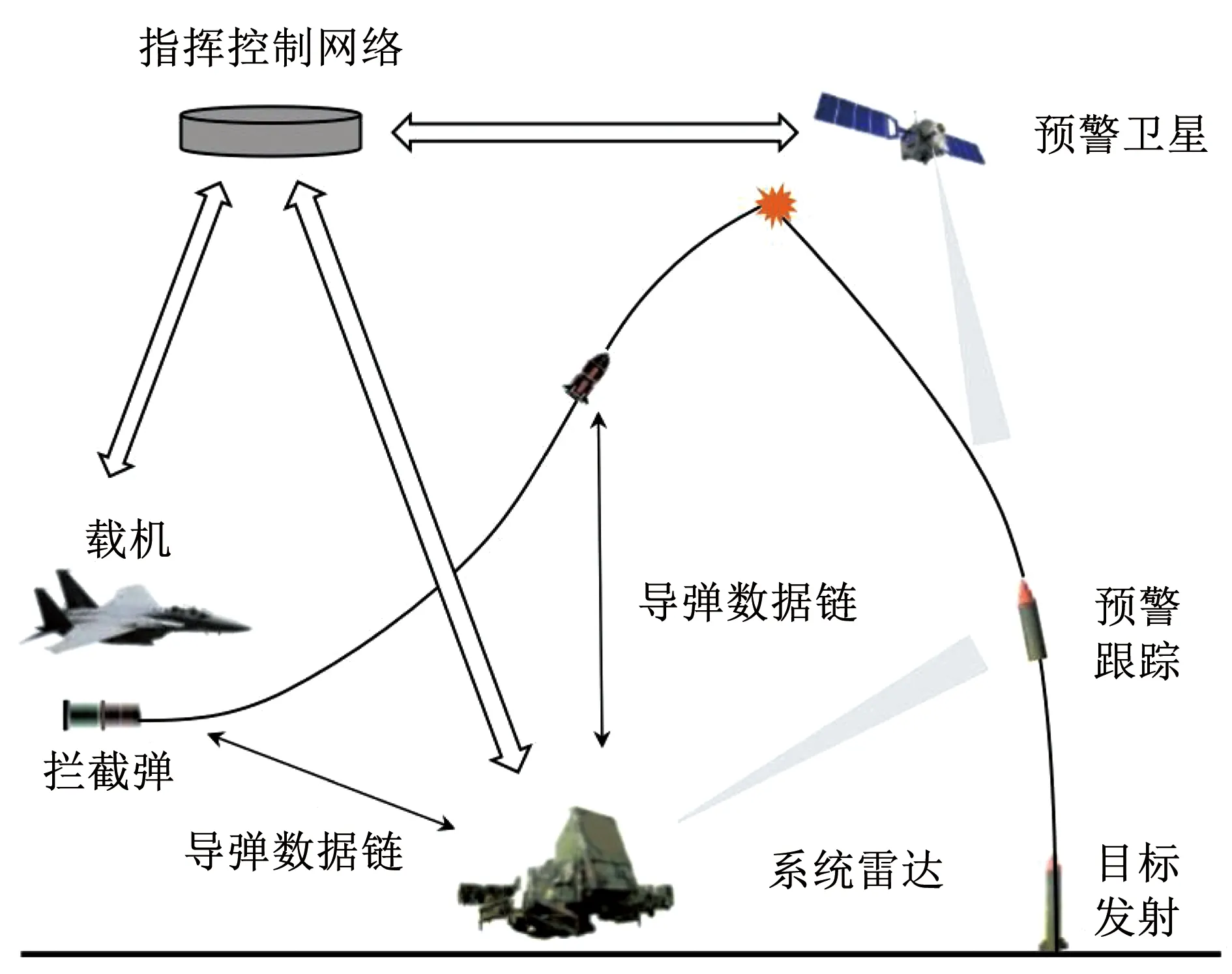
图3 ALHTK系统作战示意
1.1.3 无人机助推段拦截系统
空基反助推段拦截方案采用有人驾驶飞机时,飞行员执行任务能力会影响拦截效果,同时有人驾驶飞行成本较大,飞行滞空时间较短,无法在预定目标附近进行长时间巡逻及监测.美国导弹防御局于1995—2000年开展无人机(UAV)助推段拦截项目[17-18].该项目拟将高空长航时无人机作为载机,在一定范围内部署多架无人机,可以长时间监测预定目标,提高预警探测和发射之间的反应速度.初期制定了75架无人机和1 200枚拦截弹的空基反导部队结构.
拦截方案中,多架改装后的无人机以19 km高度在目标区域进行20 h的巡逻飞行,每架无人机可以携带6枚拦截弹.无人机探测距离为200 km,当目标发射升空后,附近的无人机可以进行快速预警探测,然后将信息传递给处在最佳发射位置的无人机.拦截弹由单级助推器和动能拦截器组成,发射后助推器工作9 s,增速约3 000 m/s.无人机通过数据链对其实现指令制导,飞行末段通过动能拦截器配备的红外导引头实现寻的制导,从而摧毁目标[19],过程如图4所示.
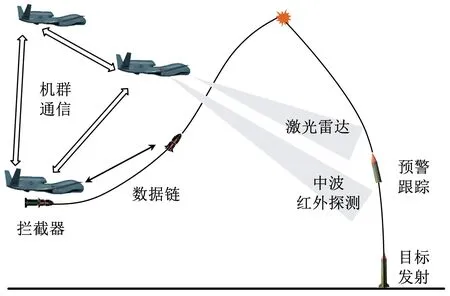
图4 无人机助推段拦截作战示意
1.1.4 以色列助推段拦截系统
以色列助推段拦截系统(IBIS)概念在20世纪90年代被提出[20],拟利用无人机搭载导弹对助推段目标进行拦截,此系统与美国的无人机助推段拦截项目进行合作研制.该系统拟研制高空长航时隐身无人机在预定目标附近盘旋,发现可疑弹道导弹升空后,发射机载空空导弹进行拦截.
共有3家以色列企业参与研制该系统[21].以色列飞行工业公司负责设计一款隐身无人机,通过新型隐身涂料等低可观测性技术来提高隐身性能.以色列拉斐尔武器研制局负责设计拦截弹.新型拦截弹称为导弹优化反弹道(MOAB)拦截器,基于怪蛇空空导弹进行改进设计,其质量大小和美国先进中程空空导弹(AMRAAM)类似.以色列威尔士公司负责系统集成设计,将隐身无人机和拦截器的各个组件进行组装.该项目最后无疾而终.
1.2 空基反助推段导弹发展现状
空基反助推段导弹是直接摧毁目标的武器,需要具有一定的速度和射程,从而实现有效拦截.国内有关空基反助推段导弹的信息还鲜有报道,国外提出的空基反助推段导弹大都基于现有空空导弹以及地基防空导弹进行改进设计.其中最著名的是NCADE系统使用的拦截弹.
NCADE系统拦截弹是在先进中距空空导弹(AIM-120)基础上进行改进研制,具体结构如图 5所示.NCADE拦截弹的外形结构、气动布局和AIM-120大致相同.同时也具备相同的机载机械接口,无需对载机进行改进设计,减少后勤保障成本.拦截弹具有两级发动机,其中一级为固体发动机,和AIM-120导弹的发动机结构相同;二级为液体发动机,可以实现轴向推力控制和侧向直接力控制.头部装备红外导引头,可以跟踪助推段目标尾焰特征实现精确制导.

图5 NCADE结构
拦截弹一级发动机开机后根据装订指令进行制导飞行.一级发动机关机后推机器分离,二级发动机点火后根据载机传输的指令进行制导飞行,发动机关机后头体不分离.此时红外导引头可以监测到目标的尾焰,采用相应末制导律进行动能碰撞杀伤,实现对目标的精确摧毁.拦截弹的最大飞行速度为8Ma,可以对高度为20~80 km,距离150 km内的助推段飞行目标实施拦截[22].
基于现有防空导弹进行适当改进也是空基反助推段导弹设计的重要思路,目前还未有实际型号报道.ALHTK系统方案拟直接将符合条件的防空导弹进行机载发射,PAC-3拦截弹和THAAD拦截弹作为计划方案.
PAC-3拦截弹由一级固体发动机,制导机构、姿态控制系统和雷达导引头组成.拦截弹长度为4.6 m,直径0.26 m,质量为304 kg[23].PAC-3拦截弹发射后通过助推器加速飞行,最大飞行速度为6Ma,发动机关机后头体不分离,保持整体继续飞行,直至摧毁目标.拦截弹的最大拦截高度为20 km,最大拦截距离为40 km.从PAC-3拦截弹的质量和整体尺寸来看,适宜进行机载发射,但是作为空基反助推段导弹,其拦截能力还需进一步提高.
THAAD拦截弹由一级固体火箭发动机和动能杀伤器(KKV)组成.拦截弹长度为6.17 m,质量约为900 kg[24].导弹发射后通过助推器加速,之后释放KKV. KKV装备红外导引头、姿轨控系统和电子设备等,可以实现对目标精确动能碰撞杀伤.THAAD拦截弹的最大飞行速度约为6Ma,最大射程为300 km,拦截高度为40~180 km.从拦截能力和体积质量等方面来看,THAAD拦截弹适宜改装作为空基反助推段导弹.
1.3 空基反助推段制导技术发展现状
空基反助推段导弹的理论研究工作开展较早,国内外的学者们在制导技术方面进行了相关方法的设计与分析.
美国早在20世纪60年代就开展了弹道导弹助推段拦截的相关理论研究工作.在2001年组建新的研究小组对导弹助推段拦截中的技术和问题进行了论证,提出了由助推器和KKV组成的拦截弹方案.在KKV飞行阶段,远距离利用红外传感器跟踪目标尾焰进行制导,近距离通过图像和雷达系统精密测量目标弹体实现精确制导[25].Zarchan[26]提出助推器工作时采用兰伯特制导,KKV采用增强比例导引的制导方案,并结合拦截场景进行分析.针对助推段拦截可用时间短的问题,Lukacs等[27]提出一种基于变分法的直接优化方法来实现快速制导,理论上具有较好的鲁棒性和较快的计算速度.比例导引、bang-bang控制制导和预测制导等方案被应用于助推段拦截末制导中,Jang等[28]在不同拦截场景下对这几种方法的制导性能进行了比较.
国内在反助推段导弹制导技术的理论研究方面也取得了诸多进展.反助推段导弹中制导阶段面临着目标预测不确定的问题,李宪强等[29]利用自抗扰控制器对不确定项进行估计和补偿,结合平行接近法设计了空基助推段拦截中制导律.董杰等[30]针对预测命中点变化的情况,设计了修正比例导引律实现助推段拦截.反助推段导弹末制导阶段面临着目标机动的问题,Zhou等[11]提出了基于LQ优化的最优制导方法,设计了相应的代价函数和剩余飞行时间计算方法.葛致磊等[31]利用视线信息设计了滑模制导律,可实现对助推段目标的精确拦截.此外,国内学者也结合预测制导、微分对策和神经网络等方法对助推段拦截制导问题进行了理论研究.
2 空基助推段拦截制导面临的挑战
2.1 拦截弹速度与过载能力有限
在拦截过程中,拦截弹与目标的速度比是影响拦截效果的关键因素之一[32].拦截弹的飞行速度受到质量、结构和推力等方面的影响,空基反助推段系统发展现状各个方案中助推段拦截弹的最大速度为2 500~3 000 m/s.依据此标准,图6给出一种典型拦截弹的飞行速度变化情况.将目标发射150 s时作为拦截时刻,此时拦截弹速度与目标速度比接近于1,之后会小于1. 值得注意的是,为了保证射程,拦截弹在竖直方向上的速度分量小于水平方向的分量,同时也小于目标在竖直方向上的速度.所以在制导过程中应当充分考虑到竖直方向上拦截弹和目标的相对位置变化,防止脱靶.

图6 拦截弹速度变化
受到机载武器质量结构限制和燃料工艺水平等因素影响,拦截弹本身的可用过载是有限的,能量也是有限的.所以需要设计合适的制导方案,在能量合理分配情况下利用有限过载实施拦截[30].尤其是在末制导阶段,由于目标机动,弹目视线旋转变化相对较大,容易出现拦截需用过载剧烈增大的情况[26],这对制导律的设计提出了更高的要求.
2.2 可用拦截时间短暂
助推段拦截需要在目标飞行器助推阶段结束前完成,目前弹道导弹的助推飞行时间大约为2~3 min,液体发动机助推时间相对固体发动机要长一些.拦截系统需要在此时间内完成预警探测、跟踪预报、发射决策、拦截摧毁等工作[33].因此拦截弹可用飞行时间会受到极大限制.
典型弹道导弹的助推飞行时间见表1.
表1 典型弹道导弹助推飞行时间
由表1可以看出,三级导弹的助推段时间相对较长,进行助推段拦截时可用时间较长,载机可以在较远处发射拦截弹.同时三级弹道导弹为战略武器,多用来攻击重要目标,所以作为助推段拦截的首选目标.一、二级导弹助推段飞行时间相对较小,可在较近处发射机载拦截弹.
助推段拦截的首要环节是对弹道导弹进行预警探测,从而为指挥控制系统和载机发射决策提供准确的目标信息.预警探测过程时间的长短将直接影响拦截弹发射窗口和可用飞行时间[34].预警探测主要有天基卫星预警和预警机预警两种方式.天基卫星在导弹穿出云层后才能对其尾焰红外特性进行监测,从而发现目标[35].美国应用物理学会的资料显示,导弹上升至7 km高度时,天基红外系统才可以对其进行扫描探测.预警机利用自身预警雷达对目标探测,成功探测条件为:目标导弹和预警机雷达的相对径向速度超过150 km/h,满足预警机雷达的多普勒频移要求[36].可以看出,这两种预警探测方式都需要耗费一定时间.
探测到目标发射后需要对其建立稳定的跟踪,为拦截弹提供目标运动数据[37].天基预警卫星对目标进行红外探测,当尾焰特征在成像探测器中移动10个像素时,卫星就实现对目标的跟踪,此段时间即为天基预警建立跟踪所需时间,大约10 s.预警机雷达通过波束扫描方法来实现跟踪,经过3~6个脉冲周期可以发现目标方向并建立稳定跟踪,时间可以控制在5 s内.
以最具拦截价值的三级洲际导弹目标为例,图7给出了拦截弹最大可用飞行时间[25].
图7 三级洲际导弹助推段拦截时间分布情况
2.3 复杂约束与预报不确定性
反助推段导弹在拦截过程需要满足一定的飞行约束才能实现精确拦截.严格的时间约束、能量约束、过载约束是制导方案设计首先考虑的因素[38].拦截弹采用红外导引头实现对目标尾焰的跟踪,为保证红外导引头的成像精度和稳定,飞行需要满足热流密度约束[39].此外,由于目标的爬升能力大于拦截弹,中末制导交班时的约束条件相对复杂.交班时拦截弹的高度要大于目标高度进行占位,防止出现尾追情况丢失目标;交班时刻目标应该处于拦截弹导引头的视场内,此时拦截弹高度大于目标,这会给姿态带来新的约束;交班时也需考虑速度指向约束,可以减少末制导修正,降低脱靶量;为了保证中末制导交班弹道平滑,过载变化约束需要满足.末制导阶段还要考虑视线约束和撞击角度约束.因此,助推段拦截制导需要满足一系列复杂的飞行约束[40].
拦截弹发射时刻利用目标的轨迹预报信息进行指令解算,但短时间内的初始预报结果存在一定的偏差.在拦截弹飞行过程中随着时间的推迟和目标飞行特性变化,轨迹预报结果也在不断变化[41].而制导过程利用目标轨迹信息使拦截弹向目标飞行,因此拦截弹制导飞行受到目标轨迹预报不确定的影响[42],需要及时调节飞行指令,直至通过导引头可以监测到目标实际飞行状态.
2.4 远射程和大交会角拦截
目标发射阵地附近的空域会受到重点保护,助推段拦截时载机需要接近目标进行发射,距离越近载机被击落的风险越高.提高拦截弹的射程可以使载机距离目标较远处进行发射,从而降低风险.目前助推段拦截方案中拦截弹射程多为150~200 km,个别设计射程为400 km[43].增大拦截射程主要通过提高拦截弹速度和适当增加拦截时间来实现.拦截速度主要与燃料质量和比冲相关.最大拦截时间一般为目标助推段飞行即将结束时,此时目标的速度在推力的作用下即将达到最大,同时所处的高度也较高,因此远程拦截会面对高空高速的机动目标.高空飞行时拦截器无法借助气动力,只能通过直接力来拦截机动目标,需要设计高精度制导方案.具有变加速度的高速目标将会影响制导精度,带来较大的脱靶量.因此远射程拦截会对制导性能和精度提出较高要求.
助推段拦截过程中目标处于不断爬升的状态,拦截弹在保证射程的前提下也要不断爬升,最终实现拦截.此时拦截交会角接近90°,和常规拦截方式相比,交会角较大,会给制导精度带来一定影响,容易造成较大脱靶量.图 8给出了不同拦截射程情况下交会角的情况.其中不同颜色代表在不同距离发射的拦截弹轨迹曲线,紫色、红色、绿色和黑色分别为距离100、200、300、400 km发射时的拦截曲线.
图8 不同拦截射程下的交会角[44]
2.5 目标机动性强
助推段飞行的目标在发动机作用下具有较大的加速度,随着燃料消耗和级数变化,目标的加速度是不断改变的,如图 9所示.目标机动将会给助推段拦截制导带来巨大的挑战[45].在末制导阶段,拦截器的过载能力有限,此时目标具有较大的加速度容易造成较大的脱靶量,导致拦截失败.
图9 助推段飞行目标加速度变化
由目标的加速度变化曲线可以看出,在助推飞行大部分阶段竖直方向的加速度大于水平方向的加速度,目标在竖直方向的速度会增加较快,高度会不断爬升.图 10表示目标速度变化,可以看出在竖直加速度作用下,目标竖直速度远大于水平速度,具有较强的高度爬升能力[31].此时拦截弹的高度爬升能力会严重影响到拦截效果,过低的高度爬升能力和不恰当的拦截方案将会使拦截弹丢失目标.
图10 助推段目标速度变化
3 空基助推段拦截制导关键技术
3.1 高效动力系统配置及快速响应
为了在助推段拦截中具有更好的拦截性能和更远的射程,拦截弹需要具备一个高效的动力系统,其发动机推力与布局方式也会对制导效果造成很大影响[46].目前高空远程拦截弹的动力系统多采用固体发动机,具体可分为单级和多级系统,如THAAD导弹和标准系列导弹[47].提高固体动力系统效能主要有两种方式:一是使用端羟基聚丁二烯等高能推进剂来提高发动机比冲;二是通过优化结构和采用新型材料提高发动机的质量数[48].此外,在拦截助推段飞行目标时,可用时间短以及目标机动等特点都对动力系统的响应能力提出了更高要求.高空拦截过程中气动力作用效果差,往往引入直接力来提高系统对飞行指令的响应能力[49].利用直接力和气动力复合控制来提高拦截弹响应的方式受到很多学者的关注,目前在轨控/姿控方式、喷流影响、点火策略以及性能分析等方面取得了一定成果[50-51].针对直气复合方式的拦截弹,利用最优控制、模型预测控制以及自适应滑模控制等方法可以实现拦截弹的稳定飞行和快速响应[52-53].
装备高能推进剂的多级动力系统是远程反助推段导弹设计的关键技术之一,是保证拦截弹具有足够射程和良好制导性能的基础.对于飞行过程中直接力的实现,采用多喷管技术实现轴向和侧向控制的液体推进系统值得深入研究.同时,可以将飞行过程中发动机开关执行策略融入制导律设计中,以实现指令的精确响应[54].
3.2 空基发射诸元快速设计
诸元解算是拦截弹顺利发射的重要保障,在确定发射点状态后需要计算发射方位角、飞行程序角等诸元参数[55].助推段拦截任务时间短,机载发射初始状态变化快,这都要求空基发射诸元必须实现快速解算.传统发射诸元设计主要通过积分,射表拟合以及自由段解析等方法实现[56],迭代设计也逐渐成为一种重要方式.Zhang等[57]通过遍历计算得到飞行状态和边界表,利用此表得出发射诸元初值,然后采用Levenberg-Marquardt方法设计精确值.何睿智等[58]在弹道设计中选取7个关键设计量,运用参数化迭代的思路,实现机动发射条件下设计诸元的快速解算.目前神经网络、代理模型[59]和多学科优化[60]等新方法也被应用到诸元设计中.鲜勇等[61]利用BP神经网络算法建立了发射诸元和终端状态的映射关系,在制备大量的弹道数据后可以实现发射诸元的快速设计,并具有较高精度. Zhao等[62]提出了一种基于大样本数据和元模型的设计方法,利用多项式响应面,Kriging和元模型建立函数关系,然后通过自动迭代得到发射角等参数.
空基反助推段导弹的发射诸元设计需要考虑目标轨迹预报结果与载机飞行状态.射表法和迭代法存在精度不高与计算速度慢等不足.采用线下计算大量弹道数据与智能学习算法结合的诸元快速解算方法是今后研究的重要方向.
3.3 考虑目标轨迹变化的指令修正技术
为提高响应速度和缩短发射前时间,空基拦截弹的发射诸元只根据目标最早的跟踪预报数据来解算.在拦截弹发射后,通过目标最新的跟踪数据可以得到越来越准确的轨迹预报信息,因此拦截弹中段飞行需要具有指令修正的能力[63].目前中段飞行指令修正技术主要分为两大类.一种是利用最优控制、滑模变结构控制和模型预测控制[64]等方法生成修正指令.张浩强等[65]基于模型预测控制理论设计了考虑零控拦截交班区域的指令修正中制导方法.Lei等[66]针对预测拦截点变化的问题,结合邻域最优控制理论设计了一种新型的中段最优轨迹簇生成和轨迹修正算法.另一类方法考虑飞行过程中多约束问题,采用高斯伪谱、凸优化等优化方法实现飞行指令在线计算[67].Zhou等[68]利用改进高斯伪谱方法和最优控制理论设计了一种中段飞行指令在线优化修正的方法.Lesage-landry等[69]将预测梯度信息纳入到凸优化算法中,设计了一种新型凸优化框架,可用于指令的在线生成.
考虑到助推段拦截过程中目标轨迹预测变化和复杂飞行约束等因素,在线制导是很有必要的,但是对制导算法的解算速度和实时性要求较高.可以结合凸优化和模型预测控制等理论在算法精度、收敛性和计算速度等方面深入研究.
3.4 中末制导交班方案设计
中末交班过程是衔接中制导和末制导的重要环节,可以为末制导提供良好的初始条件[70].在交班过程中,拦截弹需要满足导引头的捕获条件,还要考虑弹道平滑、高度、速度和交会角等复杂约束.导引头捕获条件包括距离捕获和角度捕获,具体指当弹目距离在导引头探测距离内时,导引头在指定的角度方位开机工作,可以在视场内观测到目标[71].袁俊超等[72]考虑目标检测等因素建立了导引头交班成功概率模型,研究了机动目标对交班成功概率的影响.弹道平滑约束指在交接过程中要避免指令跳变[73],需要设计过渡导引段.速度和交会角约束会影响拦截弹在交班时的捕获能力,在导引头捕获目标的同时,目标需要处拦截弹捕获能力范围内,从而实现成功拦截[74].Morgan[75]考虑了位置、速度等交班条件,以能量消耗最小为指标设计了拦截中制导律.
与常规导弹目标拦截相比,拦截助推段飞行目标的中末交班条件更加复杂:1)目标处于变加速运动中,轨迹预测难度大,预测命中点会存在较大偏差;2)目标具有较大的纵向加速度,会使交班条件的速度以及交会角约束更加苛刻;3)拦截弹纵向加速能力弱于目标,会存在高度占位问题,使中末交班的高度和视场约束更为复杂.因此中末制导交班需要先根据交会和捕获条件等将位置、速度和角度等约束动态变化分析透彻,利用多约束优化算法来设计满足条件的中制导律,然后根据过载变化设计弹道平滑过渡方法.
3.5 适用机动目标的高精度制导律
目标的机动性会给制导效果造成较大影响,增大脱靶量或者超出拦截弹可用过载导致脱靶.而助推段飞行目标机动加速度大,并且不断变化,对制导律设计提出更高要求.针对此情况,制导律设计过程通常会加入目标机动信息处理.一些研究中将目标加速度作为有界量处理,具体制导律中包含目标机动上界信息[76-77].针对加速度未知的问题,扩张状态观测器及其改进形式被应用于目标加速度估计[78],进而设计具体制导律形式.李晓宝等[79]引入扩张状态观测器对目标机动引起的扰动进行估计,设计了非奇异终端滑模固定时间收敛制导律,实现对机动目标的拦截.此外,还有一些研究成果不估计目标机动信息,利用弹目视线变化信息结合自适应算法实现对机动目标的拦截[80-81].Kim等[82]基于弹目视线运动推导了拦截条件,利用退步控制方法设计了具有角度约束的机动目标拦截制导律.
反助推段导弹道在末制导阶段拦截过载有限,制导律设计过程中要考虑全程过载分布情况.要针对视线、交会角、相对速度等制导信息变化趋势进行研究,防止由于突变导致制导指令剧烈变化.结合智能理论和目标状态估计的先进制导律算法还需进一步研究,以实现对机动目标的精确拦截.
4 空基反助推段导弹制导发展方向
空基反助推段导弹制导技术是实现精确拦截的重要保障,目前国内外学者已采用比例导引等传统制导方式对助推段拦截过程进行了分析.考虑到助推段拦截的特点,总结空基反助推段导弹制导技术的发展方向如下:
1)全程在线自主制导.空基反助推段制导过程时间短,目标变化具有不确定性,拦截弹需要真正做到发射后不管,实现全程自主规划轨迹与在线制导,根据飞行状态实时调整轨迹,确保拦截精度.
2)高精度多模复合制导.助推段目标的跟踪接近过程需要利用红外、可见光成像和雷达等多种传感器精确测量来实现.同时针对不同飞行阶段特征和不同干扰源需要设计不同的制导方法.因此,研究可根据实际状态进行自适应的多模复合制导可以提高拦截精度和鲁棒性.
3)智能化制导.主要体现在高效率信息数据处理和分析决策.首先是在飞行中快速处理传感器数据,包括图像和状态信息等,对目标进行快速智能预测.制导过程中结合目标机动信息进行博弈分析,实现瞄准点智能切换和飞行指令决策.
4)协同制导.空基反助推段导弹可以进一步实现小型化和低成本化,利用多枚导弹拦截同一战略目标是今后的重要发展趋势.多弹协同可实现全方位拦截,可提高拦截成功率.同时多弹可实现探测跟踪和预报等任务的分工,进一步提高信息传递效率和精度.因此,考虑飞行和通信约束的多枚导弹协同制导技术是重要的发展方向.
5 结 论
1)空基反助推段导弹系统已有多种方案被提出,发展较快的是网络中心机载防御单元系统;其中拦截弹大多由空空导弹和防空导弹进行改进设计;制导技术的理论研究主要集中在制导快速性、鲁棒性和精确性等方面.
2)空基反助推段导弹制导过程主要面临以下挑战:拦截弹速度与过载能力有限、可用拦截时间短、飞行约束复杂同时目标预报具有不确定性、远射程需求和大交会角拦截、目标机动性强.需要对其飞行机理和交会几何场景深入研究.
3)空基反助推段导弹制导的关键技术主要有:高效动力系统配置及快速响应、空基发射诸元快速设计、考虑目标轨迹变化的指令修正技术、中末制导交班方案设计、针对机动目标的高精度制导律设计.需要根据上述方面研究解算速度快、满足飞行约束、自主规划和鲁棒性强的高精度制导技术.
4)空基反助推段导弹系统方案可行性较高、成本低,在未来会发挥重要作用,其制导技术会向全程在线自主制导、高精度多模复合制导、智能化制导和协同制导等方向发展.
猜你喜欢
上海人大月刊(2022年5期)2022-05-19
军事文摘(2020年14期)2020-12-17
兵器知识(2019年1期)2019-01-23
人大建设(2018年6期)2018-08-16
当代陕西(2018年6期)2018-05-22
军营文化天地(2017年12期)2017-03-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
太空探索(2014年1期)2014-07-10