一种辅助搜救的四旋翼飞行器设计
2021-07-01 06:59丁嘉俊马一川尹恒宇
科技视界 2021年15期
丁嘉俊 马一川 尹恒宇
(南通大学,江苏 南通226019)
0 引言
小型四旋翼飞行器是一种欠驱动强耦合无人飞行装置,其4个旋翼分别由4个微型电动机驱动,且均匀分布在十字交叉结构的顶端,通过控制4个旋翼的转速来调节螺旋桨转速,由旋翼升力的变化实现飞行器的垂直、俯仰、滚转、侧向、前后、偏航等姿态控制,它可自由实现空中悬停和自由移动,具有较大的灵活性与机动性能[1]。由于四旋翼飞行器具有结构简单、机械稳定性好、成本低等特点,被广泛应用于巡检、安防、测绘等各个领域。对于搜救过程而言,通过结合多传感检测、图像采集与处理、人机交互等多个模块,一方面可以提供更广阔的视角和全局信息;另一方面可以定位捕捉到更多的细节,能够为高效的搜救工作提供有力依据。
PID控制是最为经典的控制算法,被广泛应用于多种控制系统,为了克服对环境抗干扰性的不足,诞生了多种PID的延伸算法,例如,模糊PID[2]、神经网络PID[3]、串联PI-PID[4]等。此外,韩京清研究出了自抗扰控制器(ADRC)提高了控制对象对环境扰动的抗性[5];杨立本等人成功地将此控制算法应用到多旋翼的姿态控制中[6]。
本文综合考虑四旋翼飞行器的特点及搜救方案中的实际因素,设计了一款具有辅助搜救功能的小型四旋翼飞行器。采用STM32单片机作为主控制器,在硬件上搭载三轴陀螺仪、三轴加速度计以及电子罗盘、气压计等多个传感器,利用四元数法对四轴飞行器姿态进行解算,利用超声波、气压计、GPS模块和加速度计进行空间位姿的解算,采用PID-LADRC串级控制算法实现飞行器姿态和位置的控制。
1 小型四旋翼飞行器硬件设计
四旋翼的飞行方式大体分为两种:X形四旋翼和十字形四旋翼。由于在姿态控制时,X形四旋翼同时有两个桨叶提供动力,在机动上更加具有优势,本文采用X形四旋翼进行设计。
飞行器主体采用低压无刷电机与10寸(1寸≈3.33cm)螺旋桨,可以有足够的力量搭载其他用于搜救的传感器。将搭载对地超声波测距模块、光流模块、无线模块、GPS模块及4个无刷电机。其中,对地超声波模块用于检测飞行器的对地高度,实现稳定起飞与降落;光流模块用于白天GPS信号弱时检测飞行器的水平移动,实现空中稳定定点;无线模块用于实时检测飞行器状态,确保飞行安全。
飞行控制器内部搭载IMU系统,可以实时检测飞行器姿态,通过姿态控制4个无刷电机旋转速度,通过外部连接的传感器检测空间移动,并做出相应地姿态调整。
2 传感器硬件设计
飞行控制器采用STM32F407VET6单片机作为主控芯片。基于该单片机,设计系统硬件结构如图1所示。系统主要拥有4个传感器,分别为加速度计、陀螺仪、电子罗盘、气压计。其中,加速度计与陀螺仪选用MPU6050六轴姿态传感器,该传感器同时拥有三轴陀螺仪与三轴加速度计,用于解算俯仰角、翻滚角以及机体旋转角速度。

图1 硬件系统结构图
电子罗盘采用HMC5883L三轴磁力计,用于补偿航向角的误差;气压计采用MS5611气压计,用于解算飞行器的飞行高度。这3款传感器通过同一个IIC接口与单片机通信。接收机采用PPM信号与单片机通讯。单片机采用外部中断EXIT接收PPM信号的脉冲,通过TIM1计算脉冲宽度。FLASH模块采用SPI2接口双向通信,无线模块采用SPI1接口双向通信,以保证无线通信的高效性与可靠性。
另外,为保证飞行器与地面站通信,我们将采用两块NRF24L01无线通信模块进行数据传输通信,无人机飞行姿态等信息传送到遥控器,再由遥控器通过无线网传送到PC端地面站,实现无人机通信地面站的功能。
3 基于PID-LADRC串级控制器的飞行器控制
3.1 基于四元数的姿态解算
微型无人机通常采用捷联惯性导航系统,因此,飞行器在导航上面常常采用四元数法解算姿态[7,8]。通过陀螺仪数据积分计算可以得到姿态角度,数据受机体振动影响较小,但数据会由于积分原因产生漂移,因此,该数据在短时间内可靠,长时间内不可靠;根据传感器数据相互补偿的原理,姿态解算主要依靠陀螺仪数据积分计算,再加速度计数据求得的姿态角修正陀螺仪数据积分数据漂移,再转化为四元数,通过四元数微分计算,最后得出机体的姿态角。其解算原理如图2所示。

图2 姿态解算原理
采用四元数方法解算陀螺仪姿态,并用加速度计对陀螺仪数据进行PI修正,以得到较为精确的姿态数据。
在位置解算中,主要采用三轴加速度计数据通过旋转矩阵旋转到水平面和垂直平面,再通过积分可以得到机体的运动速度,速度再积分可以得到位移距离,但是积分得到的数据会产生漂移,因此,采用相应的其他传感器进行修正。
机体水平位置的解算主要采用三轴加速度计数据通过旋转矩阵从机体坐标系转换到地理坐标系,对水平方向的加速度分量进行积分得到水平方向的速度,再积分得到水平方向位移距离,通过GPS测得的绝对水平位置和加速度计积分得到的位置做差,使用差通过PID校正网络校正速度与位移。
竖直位置解算和水平位置解算大体相同,竖直方向采用超声波或者气压计修正。
3.2 飞行器控制算法
四旋翼的姿态控制采用二阶控制形式,控制量有角度控制和角速度控制。因此,四旋翼的姿态控制采用两个控制器串级控制来实现,本文采用了PID-LADRC串级控制来实现飞行器的双闭环控制,控制原理图如图3所示。
(1)四种中心锥结构水力旋流器内压力场与速度场均呈轴对称分布。适当的减小上锥段底角能增大径向压力梯度和最大切向速度,有利于固液分离从而提高分离效率。
串联控制器主要用于四旋翼飞行器的姿态控制。其输入量是期望角度,反馈量是角速度和角度。因此,需要精确地控制机体的旋转角度,才能取得良好的控制效果。在四旋翼的控制中角速度环的控制极为重要,它直接决定了四旋翼飞行的稳定性,因此,选择PID控制器控制机体角度作为外环控制,选择LADRC控制机体角速度作为内环控制。
由图3可知,控制算法是利用机体角度与期望角度的差,通过PID控制器输出期望的角速度,再通过期望角速度与机体角速度的差,再由LADRC控制器输出PWM信号控制电机,最后控制机体的姿态。

图3 PID-LADRC串级控制器
4 实验调试
4.1 调试平台
本文通过方案设计及器件选型完成了四旋翼飞行器的设计与制作。如图4所示,采用在姿态控制上更具优势的X形四旋翼,机架采用3D打印的F450机架,有4个旋翼位于其结构四个顶端,相邻的两个旋翼以不同的方向旋转以用于抵消反扭力[9]。另外,该飞行器电机及电调选择无刷电机及20A电调。

图4 F450机架
无线通信模块、惯性传感器模块以及接收机模块分布如图5所示,光流模块以及超声波模块分布如图6所示。
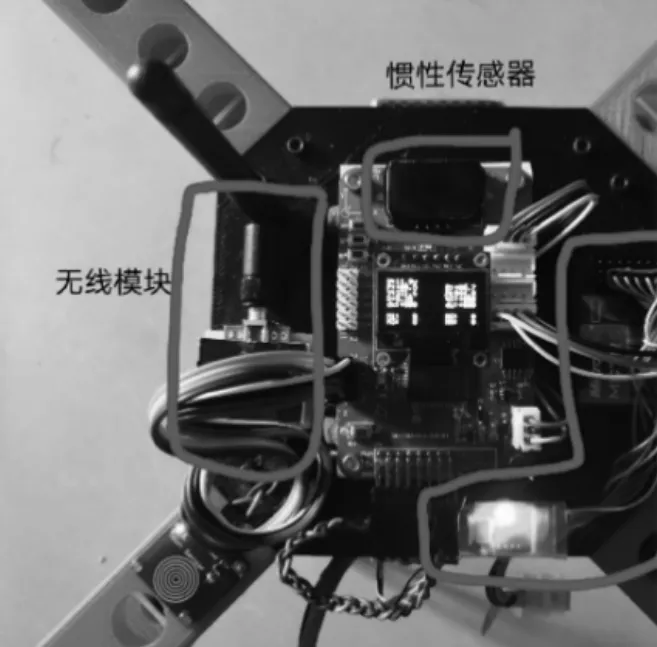
图5 传感器分布图一

图6 传感器分布图二
4.2 系统调试
本文设计了上位机监控界面,可以实时监控飞行器飞行状态,如图7所示。状态显示界面可以实时显示无人机姿态角、气压计海拔高度、对地高度以及电池电压数据。通过这些数据操作员可以清楚地了解飞行器的飞行状态,并安全驾驶。

图7 地面监控系统数据显示界面
调试姿态控制器需要先调节内环控制器,因此,应先调节LADRC参数,取步长h=0.001。LADRC调试步骤如下:
(2)增大ωc值,检查机体是否有力平衡,当能平衡时暂定ωc值。
(3)调节b0值,至系统不会因静态误差而转动。
LADRC控制参数初定后,开始调节外环PID参数,调试步骤如下:
(1)增大Kp参数,拉动遥控器,检查机体响应时间,增大Kp值快速响应,系统开始微微震荡。
(2)增大Kd参数,拉动遥控器至系统不再震荡。
当PID参数初定后,系统还需要在实际测试中再对各参数进行微调,以达到想要的控制效果。
5 结语
四旋翼飞行器应用在救援搜救领域具有实际意义,其拥有较大的灵活性与机动性能。本文采用四旋翼飞行器设计方案,利用主控制器和一些必备的三轴陀螺仪、三轴加速度计、电子罗盘、气压计等多个传感器,又利用超声波、气压计、GPS模块和加速度计进行空间位姿的解算,采用经典PID控制算法与LADRC控制算法串级控制完成飞行器姿态和位置的控制,具有结构简单,控制算法灵活的特点,在后续试验飞行调试的过程中也展示了设计方案的可靠性和稳定性。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
光学精密工程(2016年5期)2016-11-07