
建筑群组合直线模式识别的模板匹配方法
2021-06-29 00:26:24行瑞星巩现勇杜佳威刘呈熠
测绘学报 2021年6期
行瑞星,武 芳,巩现勇,杜佳威,刘呈熠
信息工程大学地理空间信息学院,河南 郑州 450001
空间分布模式是指所关注地理要素在空间分布形态上呈现出能够被识别且明确命名的形状或排列[1-2]。结合人类认知特征挖掘矢量地图数据中隐含的空间关系、结构和分布模式等知识,对于制图综合、时空数据挖掘等领域具有重要的理论意义和应用价值[1-5]。建筑群作为一类重要的地理要素,其隐含的空间分布特征,即本文的研究范畴,一直是制图综合领域研究的热点和难点[6-8]。
当前,建筑群空间分布模式的研究主要关注两个方面的问题[9]:一是模式的认知与定义,二是模式的识别和提取。建筑群空间分布模式定义是识别的前提和基础,在不同的研究领域,模式的定义则有不同的依据[10]。根据建筑物的功能结构,文献[11]提出工业/商业、市中心、市区、郊区和农村地区等5种模式。在制图综合领域,建筑群分布模式的分类和定义主要根据几何特征和空间分布特征,文献[12]将建筑群模式分为线型模式(直线型、曲线型和沿道路型等)和非线型模式(网格型和不规则型)。此外,有学者对建筑群字符型分布模式进行了研究[13-14]。建筑群分布模式识别提取的研究多集中于两个步骤[4,15-17]:①基于空间邻近的聚类;②基于视觉感知理论的空间分布特征多参数约束的模式识别。文献[18]利用Delaunay三角网构建邻近图,通过对最小支撑树进行反复修剪,实现直线模式和曲线模式的识别;文献[19]结合结构化参数对邻近图进行异质性修剪,探测出多连通的直线模式,并通过图论算法识别提取出网格模式。此外,还有采用深度学习的方法提取建筑群空间分布特征,文献[20]利用图卷积深度学习的方法提取了典型线型分布特征。直线模式识别作为一种空间数据增强方法,能有效挖掘建筑群的分布特征,为后续地图综合提供重要支持。然而,现有建筑群直线模式研究多关注于以单个建筑物为单元的同质性建筑群直线模式,对于大比例尺中建筑群局部异质性明显但整体呈直线模式分布的现象则缺乏关注,当前尚未有学者对此问题进行深入研究。在识别建筑物分布模式时,不仅需要考虑同质性建筑群的直线分布模式,还需要考虑局部异质性明显建筑群的直线分布模式,从而可以获取更全面的建筑群空间分布模式。因此,为了解决具有局部异质性的建筑群直线模式识别问题,本文提出一种基于模板匹配的建筑群组合直线模式识别方法,主要解决两个问题:①分析建筑群组合直线模式局部异质性的特点,提出多层次认知下建筑群组合直线模式的认知特征和定义;②采用模板匹配的策略解决局部异质性导致识别困难的问题,实现建筑群组合直线模式的提取。
1 建筑群组合直线模式的认知特征
建筑群的空间分布具有丰富的几何结构模式,其结构特征的识别是人类对空间信息进行感知、识别和推理的过程[21]。如何使计算机“理解”人类对建筑群模式的空间认知规律,是建筑群模式自动识别的关键。
直线模式是建筑群的典型模式之一,大量认知研究表明直线模式的拓扑感知关系具有层次性[19]:从宏观的层面看,模式群内建筑物有规律地呈直线分布;从微观层面看,模式群内建筑物具有相似的特性(形状、方向和大小等)。然而,上述直线模式的认知特征并不完全适用于具有局部异质性建筑群的直线模式。根据格式塔认知准则[4,15]、视知觉拓扑理论[22-23],观察者在观看地图时,首先,关注的是建筑物群整体空间分布,如图1(a)中所框选的建筑群会被视为一个直线模式;其次,才会注意到局部的结构和特征,如图1(b)所示,模式群内建筑物面积大小的差异会被明显地感知到。虽然图1(b)中部分建筑物之间具有明显的特征差异,但在整体上仍可被识别为直线模式。针对这种整体具有同质性而局部存在异质性的直线模式,本文引入组合直线模式的概念进行定义。组合直线模式具有多层次认知的特点,在模式整体层,建筑群呈直线模式分布,在模式构件层,直线模式由具有相似特征的模式构件组成,在模式要素层,模式构件为单个建筑物要素或由多个建筑物要素组合而成。与一般直线模式强调单个建筑物之间的同质性不同的是,组合直线模式需要考虑存在两个或多个邻近建筑物被视作一个整体(记为组合建筑物)的情况。若建筑群内存在组合建筑物,且组合建筑物作为整体与其他建筑物或组合建筑物形成直线模式,则该建筑群呈组合直线模式分布。
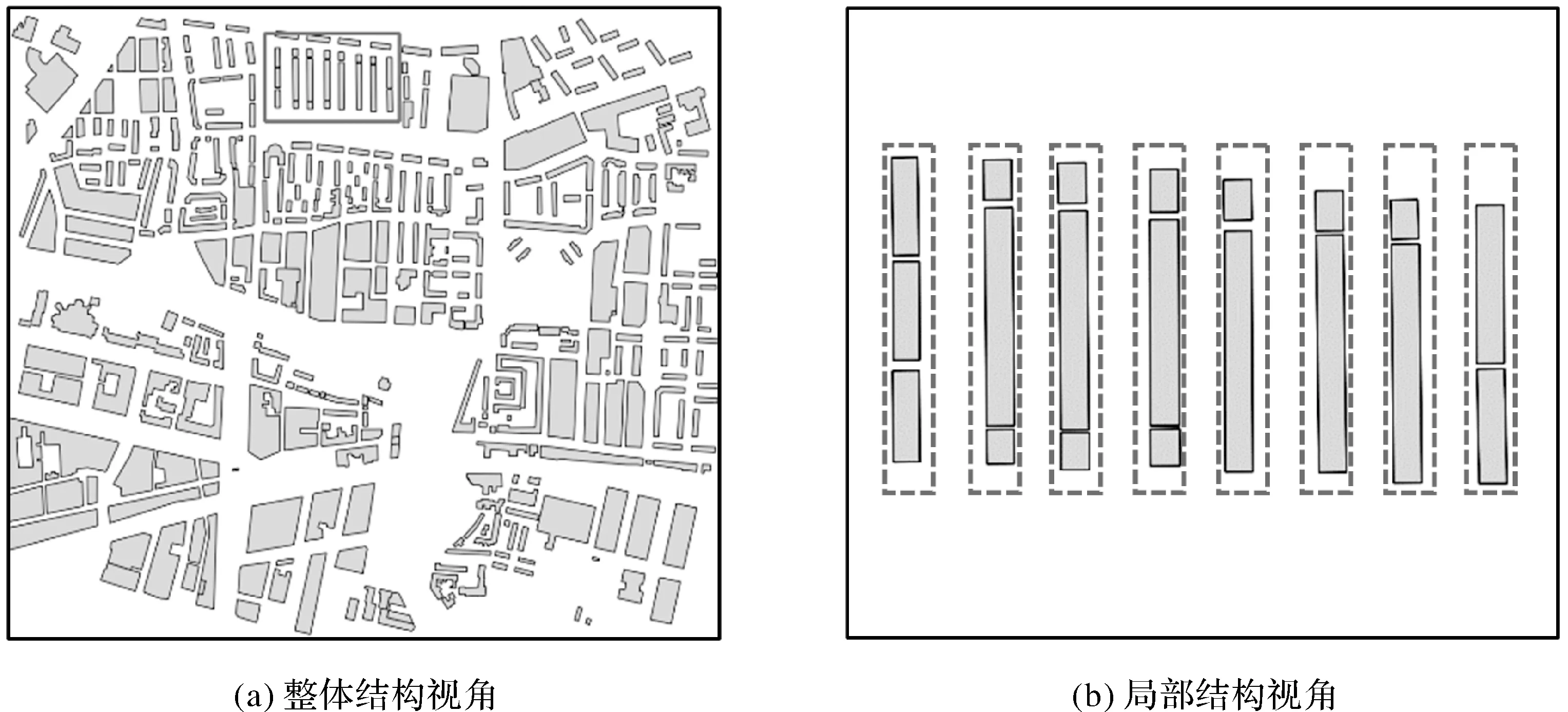
图1 整体到局部的感知认知Fig.1 The perception and cognition from whole to part
文献[4]提出了建筑物的扩展对齐分布,即如果两个建筑物的中心连线平行于两个建筑物最小面积外接矩形(smallest minimum bounding rectangle,SMBR)的长轴,则两个建筑物构成扩展对齐分布。分析可知,能进行组合并形成直线模式的建筑物具有形状规则、矩形度[24]高的特点,而且可以互相作为沿主方向(长轴方向)扩展延伸的部分,同时在与主方向垂直的维度具有相似的尺寸(短轴长度)。那么,可组合的建筑物一定呈扩展对齐分布。此处,对文献[4]定义的扩展对齐分布进行补充,即如果两个建筑物的中心连线分别平行于其SMBR的长轴,且SMBR的短轴长度相似,则构成扩展对齐分布。构成扩展对齐分布是相邻建筑物作为组合建筑物形成组合直线模式的必要条件。为区别于组合直线模式,本文将不考虑建筑物组合情况的直线模式称为简单直线模式。
从相邻模式构件中建筑物空间对应关系的角度看,简单直线模式只包含1∶1的空间对应关系,而组合直线模式中则包含1∶1、1∶n和m∶n相互组合的空间对应关系。因此,组合直线模式识别的过程可以看作是建立建筑物与所属模式构件之间1∶1或n∶1以及模式构件之间1∶1空间对应关系的过程,即建筑物由“建筑物—模式构件—直线模式”的组织过程。
综上分析,本文提出一种基于模板匹配的组合直线模式识别方法:首先,根据待识别的(组合)建筑物构建一组呈直线模式分布的模板,如图1(b)中的虚线矩形框为构建的模板;然后,通过模板与建筑物进行匹配来建立空间对应关系,识别出由模板对应建筑物组成的模式构件,即识别出由模式构件形成的直线模式,如图1(b)中每个模板内的建筑物为匹配的对应建筑物,各模板对应建筑物组合而构成模式构件,而多个模式构件形成组合直线模式。
2 基于模板匹配的组合直线模式识别
人作为认知主体自然地以有组织的模式感知空间场景遵循格式塔认知准则,主要包括:邻近性、相似性、连续性、封闭性、连通性和共同区域等6个原则[15-17]。对于建筑群,封闭性、连通性和共同区域可由邻近性代替,因此在建筑群模式识别时,主要考虑邻近性、相似性和连续性[19,25]。考虑到组合直线模式的直线性、相似性和局部异质性等特点,结合人类视觉格式塔认知准则,从建筑物的形状、大小和方向建立认知意义上的结构化参数(表1),作为组合直线模式提取的约束条件。
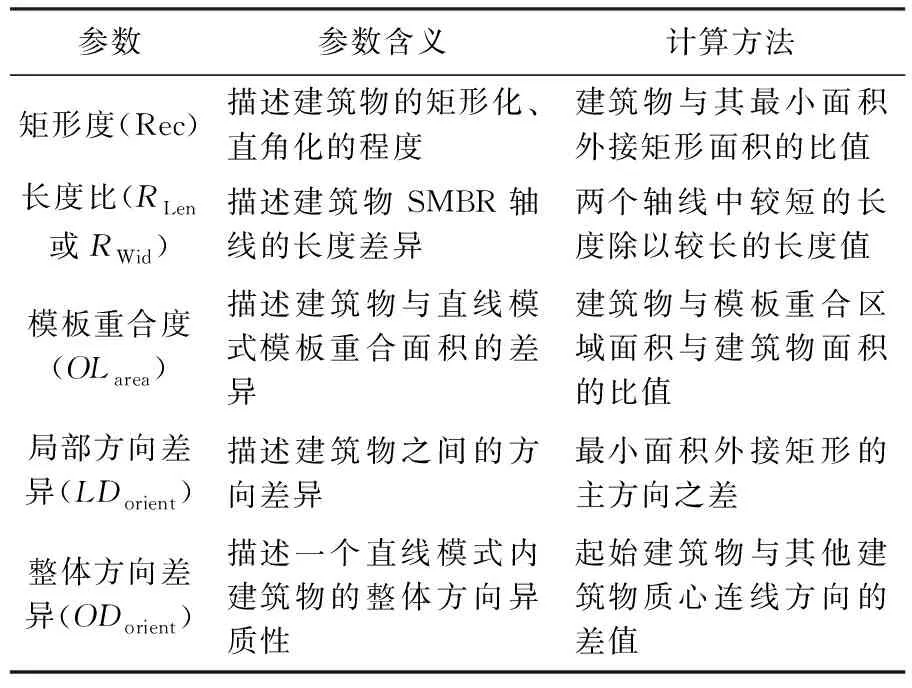
表1 组合直线模式结构化参数
本文采用“自顶向下”与“自底向上”相结合的策略进行组合直线模式的识别提取:首先基于建筑物邻近性、尺寸和方向约束进行聚类,获得建筑物空间邻近关系和扩展对齐关系;然后,构建建筑群直线模式的连续匹配模板,以所建的模式结构化参数为约束,最终实现组合直线模式的提取。
2.1 构建建筑物空间邻近关系及扩展对齐关系
建筑物的空间邻近及扩展对齐关系构建作为直线模式识别提取的数据准备阶段,主要提供空间数据模型支撑。建筑物的空间邻近性是其构成直线模式的必要条件,邻近关系的构建是建筑群模式识别的首要任务。本文采用约束Delaunay三角网构建建筑物邻近关系,构网之前需要对建筑物边界进行内插加密。根据第1节分析可知,只有呈扩展对齐分布的建筑物才有可能形成组合直线模式,建筑物扩展对齐关系的确定是组合直线模式识别提取的前提。扩展对齐关系可在空间邻近关系的基础上获取,具体步骤如下:
(1) 构建建筑群的CDT,获取邻近关系并进行记录。
(2) 选择CDT中任意一条连接不同建筑物的边Ei,获取Ei所连接建筑物A、B的SMBR长轴及短轴,计算建筑物A、B中心连线与建筑物A、B的长轴夹角θA、θB,计算建筑物A、B短轴的长度比Rwid,如果θA、θB、Rwid同时满足式(1)的条件
(1)
式中,δori和δwid分别为人工设定的方向差和长度比的阈值。则两个建筑物构成扩展对齐分布,并进行记录;否则,两个建筑物不构成扩展对齐分布,删除边Ei。
(3) 重复执行步骤(2),直至遍历完整个CDT,获得建筑物扩展对齐分布聚类结果(图2)。
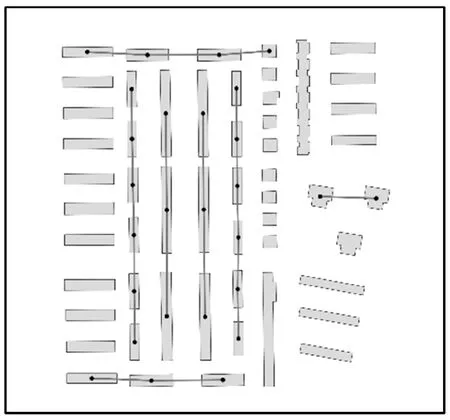
图2 扩展对齐分布聚类结果Fig.2 Clustering result of extension alignment
根据面向对象的编程思想,可以构建建筑物空间关系的数据结构,Neighbor结构体如下所示。
public struct Neighbor
{
Public IFeature building; ∥建筑物要素
Public IPolygon building_SMBR;∥建筑物的最小面积外接矩形
PublicList
Public int building_Extend1;∥扩展对齐的建筑物ID
Public int building_Extend2; ∥扩展对齐的建筑物ID
…… ∥其他成员变量
}
注:一个建筑物最多存在两个直接邻近且呈扩展对齐分布的建筑物。
2.2 构建初始匹配模板
本文构建匹配模板的思路是首先根据待识别的(组合)建筑物确定初始匹配模板的几何特征(形状、尺寸),然后根据初始匹配模板连续构建形状、尺寸相同且呈等间隔直线分布的模板来搜索、匹配待识别的建筑物。初始匹配模板的几何特征由待识别(组合)建筑物决定。由于组合直线模式中建筑物与模式构件有1∶1和n∶1的空间对应关系,因此,在构建初始匹配模板时需要考虑两种情况:①以单个建筑物为搜索起点构建匹配模板,如图3(a)中建筑物A;②以组合建筑物为起点构建匹配模板,如图3(b)中建筑物A和B组成的组合建筑物。考虑到组合直线模式的模式构件为形状规则、矩形度高的(组合)建筑物,因此本文以(组合)建筑物的SMBR作为匹配模板。模式识别过程中,根据匹配模板与建筑物的空间关系可以初步筛选出待识别的建筑物候选集合,为了适当扩大模板匹配范围,需要对提取的SMBR进行一定程度的放大,将放大后的SMBR作为初始匹配模板,如图3(a)、(b)中虚线框所示。
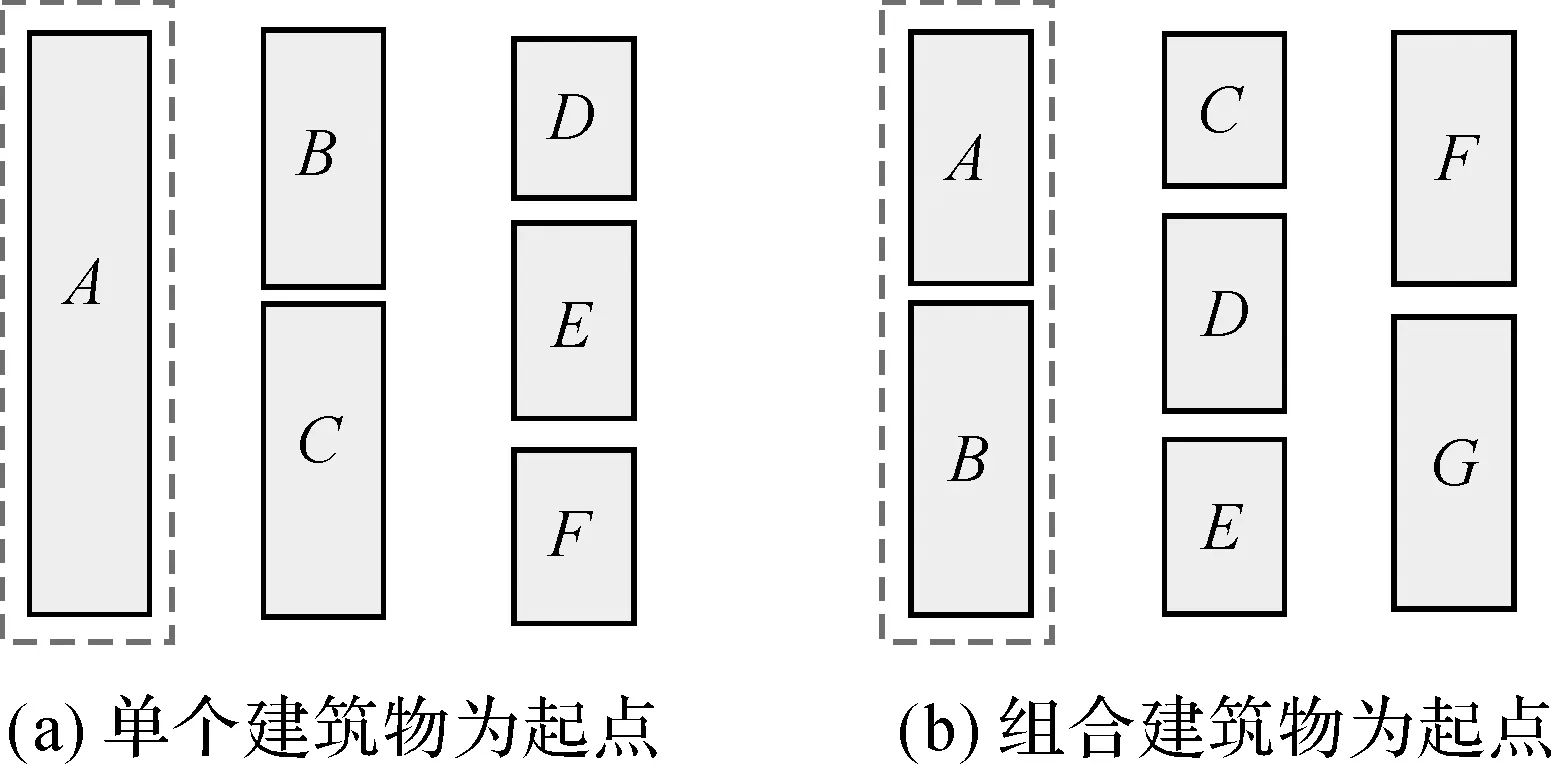
图3 初始匹配模板构建Fig.3 Construction of initial matching template
2.3 确定模板的分布间隔和方向
根据初始匹配模板连续构建形状、尺寸相同且呈等间隔直线分布模板的关键是确定模板的分布间隔和方向,根据典型的建筑群直线模式分布特征可知,模式中任意两个直接邻近建筑物的分布间隔和方向(质心连线方向)可以反映整个直线模式内建筑物的分布特征。本文利用锚点来表达相邻建筑物的分布特征(间隔、方向),结合图4所示,设图4(a)中的矩形SA(A1A2A3A4)和SB(B1B2B3B4)是相邻建筑物A和B的SMBR,相邻建筑物锚点的获取步骤如下:
(1) 将矩形SA和SB以各自几何中心OA和OB为基准点进行叠置(图4(b))。
(2) 分别计算矩形SA的顶点A1、A2、A3和A4到矩形SB所有顶点之间的距离。
(3) 分别取距离最近的一组顶点记为锚点,如图4(b)中用虚线连接的点对,如点A1与B1之间的距离较其他SB上顶点最近,则A1与B1为一组锚点。
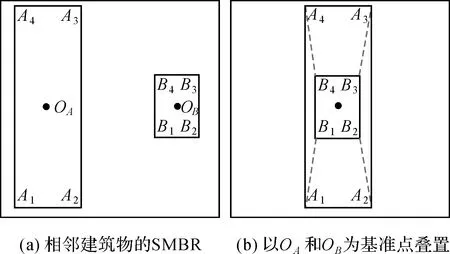
图4 获取相邻建筑物锚点Fig.4 Obtaining anchor points of adjacent buildings
分析可知,对于两个大小、形状相似且主方向一致的建筑物,以锚点为基准进行叠置则两个建筑物的重合面积与自身面积基本相等。结合典型直线模式认知特征可知,模式内两个相邻建筑物的任一组锚点间距可以表达模式内建筑物的分布间隔,而其连线的方向则表达了模式内建筑物的分布方向。因此,可以根据起始建筑物和相邻建筑物之间锚点计算出后续匹配模板的位置。如果相邻建筑物与其扩展对齐的建筑物能以组合的形式作为组合直线模式构件,虽然起始建筑物与该邻近建筑物之间的不同锚点表达不同分布特征的模板,如图5(a)、(b)所示,但肯定存在一组可以表达该模式内建筑物空间分布特征的锚点。因此本文分别取该邻近建筑物SMBR任一对角线上的两个端点获取锚点,并以此分别构建后续的匹配模板,如图5所示,顶点B1和B3是一条对角线的端点,分别以A1、B1和A3、B3组成锚点,可构建出不同分布特征的匹配模板。
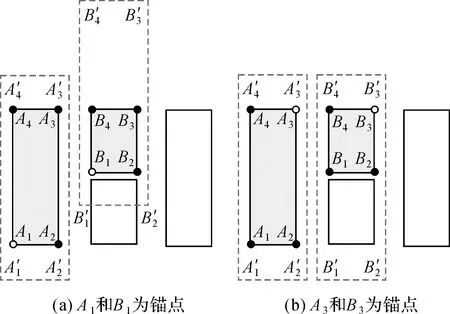
图5 根据不同锚点构建匹配模板Fig.5 Matching templates based on different anchor points
(2)
(3)
根据新模板的顶点坐标和式(3)不断计算出后续模板的顶点坐标。
2.4 建筑群组合直线模式提取
本文所提模式识别方法主要根据初始匹配模板连续构建形状、尺寸相同且呈等间隔直线分布的模板来搜索、匹配待识别建筑物,同时结合约束条件来判定待识别的建筑物能否组成直线模式。结合上述模式提取关键步骤,记建筑物Pi的矩形度为Rec(Pi),Pi与模板M的面积重合度为OLarea(Pi,M),Pi与邻近建筑物Pj的局部方向差异为LDorient(Pi,Pj),长轴长度比、短轴长度比为Rlen(Pi,Pj)、Rwid(Pi,Pj),Pi与已匹配建筑物的整体方向差异为ODorient(Pi),设矩形度、模板重合度、长轴长度比、短轴长度比、方向差异的阈值分别为δrec、δarea、δlen、δwid、δori。本文利用模板匹配方法识别建筑群组合直线模式的整体步骤如下。
(1) 根据2.1节方法获取建筑物间的空间邻近和扩展对齐关系。
(2) 选取任一建筑物或由k个建筑物组成的组合建筑物作为起始建筑物Ps(k=2,3,…n;n代表空间数据中存在最多包含n个两两直接邻近且呈扩展对齐排列建筑物的组合建筑物),如果Rec(Ps)>δrec,则构建初始匹配模板,将Ps记录到模式链表Pattern,执行步骤(3);否则执行步骤(2),直到遍历完所有建筑物和组合建筑物,执行步骤(8)。
(3) 选取任一与Ps直接邻近的建筑物Pn,如果Rec(Pn)>δrec且LDorient(Ps,Pn)<δori,则执行步骤(4);否则,执行步骤(3),直到遍历完所有直接邻近建筑物,执行步骤(2)。
(4) 计算出Ps与Pn的两组锚点,根据锚点和起始匹配模板分别构建出新的模板Mnew,分别执行步骤(5)。
(5) 如果OLarea(Pn,Mnew)<δarea,则执行步骤(2);否则,判断Rlen(Ps,Pn)、Rwid(Ps,Pn),如果Rlen(Ps,Pn)>δlen且Rwid(Ps,Pn)>δwid,将Pn记录到直线模式链表Pattern中,执行步骤(7);如果Rlen(Ps,Pn)<δlen或Rwid(Ps,Pn)<δwid,则将Pn记录到数组PList,执行步骤(6)。
(6) 搜索与Pn扩展对齐的邻近建筑物Pe,如果不存在Pe则执行步骤(2);如果OLarea(Pe,Mnew)<δarea,则执行步骤(2);否则,将Pe记录到数组PList,计算数组PList内所有建筑物长轴之和、短轴均值分别与Ps的长轴、短轴的长度比Rlen、Rwid,如果Rlen<δlen或Rwid<δwid,则将建筑物Pe标记为Pn,执行步骤(6);否则,将数组PList内所有建筑物视为一个组合建筑物Pc,如果ODorient(Pc)<δori,则将PList记录到直线模式链表Pattern中,执行步骤(7);否则,则执行步骤(2)。
(7) 根据锚点和模板Mnew构建出新的模板并标记为Mnew,遍历Pattern中最后一个建筑物Pl直接邻近的建筑物并标记为Pn,如果Rec(Pn)>δrec且LDorient(Pl,Pn)<δori,则执行步骤(5);否则,执行步骤(2)。
(8) 删除所有不包含组合建筑物的模式,去除完全重复的模式。
此外,上述步骤经过少量适当修改后,可适用于提取简单直线模式。
下面以图6所示的建筑物为例说明本文组合直线模式识别方法。设A为起始建筑物,选择与A直接邻近且满足局部方向差异和矩形度约束的建筑物B为待匹配对象,计算建筑物A和B两组呈对角线分布的锚点,根据起始模板MA1分别构建出模板MB1和MB2,如图6(a)所示;选择以MB1为搜索匹配方向,如图6(b)所示,建筑物B与模板的面积重合度大于阈值,但与建筑物A长轴长度比小于阈值,因此选择与建筑物B形成扩展对齐且与模板MB1面积重合度大于阈值的建筑物C为待组合对象,建筑物B、C的长轴之和、短轴均值分别与建筑物A的长轴、短轴长度比大于阈值,因而将建筑物B、C视为组合建筑物(图6(c))并将B和C记入模式链表,至此,模板MB1的建筑物匹配完成;根据锚点与模板MB1构建出模板MD1,如图6(c)所示,遍历与建筑物B、C直接邻近且符合局部方向差异和矩形度约束的建筑物,选择与模板MD1面积重合度大于阈值的建筑物D,因为建筑物D与A的长轴、短轴长度比大于阈值,将D记入模式链表,如图6(d)所示;选择以MB2为匹配方向则无符合要求的建筑物。至此,以建筑物A为起点最终识别出一组组合直线模式。
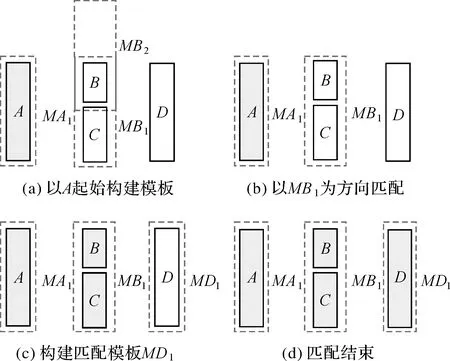
图6 组合直线模式识别过程Fig.6 Process of combined collinear pattern recognition
3 试验与讨论
3.1 试 验
为验证本文算法的有效性,使用C#和ArcGIS Engine编程实现了以上算法。为更好体现所提算法的合理性和适用性,试验分为两组,采用两组不同尺度和不同空间分布特点的数据进行试验,同时加入了简单直线模式提取的对比试验。本文组合直线模式提取方法的整体过程涉及多个参数阈值,参数阈值设置的总体思路为:矩形度、长度比和模板重合度的阈值越大(经验取值[0.6,1]),放大倍数越小,方向差异的阈值越小(经验取值[0°,10°]),则模式的直线性、同质性越强。
试验数据1为荷兰鹿特丹(Rotterdam,the Netherlands)地区1∶10 000比例尺的部分建筑群,试验区域总共包含612个建筑物,如图7(a)所示。所选试验区域建筑物的大小和形状具有一定的差异性,多数建筑物分布方向近似,且形状规则、矩形度高,建筑群局部分布密集,存在明显的局部空间异质性,在视知觉上呈现出明显的组合直线模式。参考前人经验[18-19],经过反复测试,参数设置见表2,扩展对齐分布聚类如图7(b)所示,识别提取的组合直线模式如图7(c)所示,识别提取的简单直线模式如图7(d)所示。
试验数据2为中国广州市区的局部建筑群,数据来自OpenStreetMap,比例尺为1∶5000,试验区域总共包含288个建筑物,如图8(a)所示。所选试验区域多数建筑物形状规则、矩形度高,建筑群整体分布密集,没有全局平稳的特征,一阶邻域内要素的面积变化较大,有明显的空间异质性,但在某些局部区域存在较为平稳的特征,因此在视知觉上呈现出明显的组合直线模式。参数设置如表2,扩展对齐分布聚类如图8(b)所示,识别提取的组合直线模式如图8(c)所示,识别提取的简单直线模式如图8(d)所示。图7、图8中虚线为每个组合建筑物内相邻建筑物几何中心的连线,用以表示由组合建筑物形成的模式构件,实线为每个直线模式内相邻模式构件即建筑物或组合建筑物的几何中心连线,用以表示由模式构件形成的直线模式。
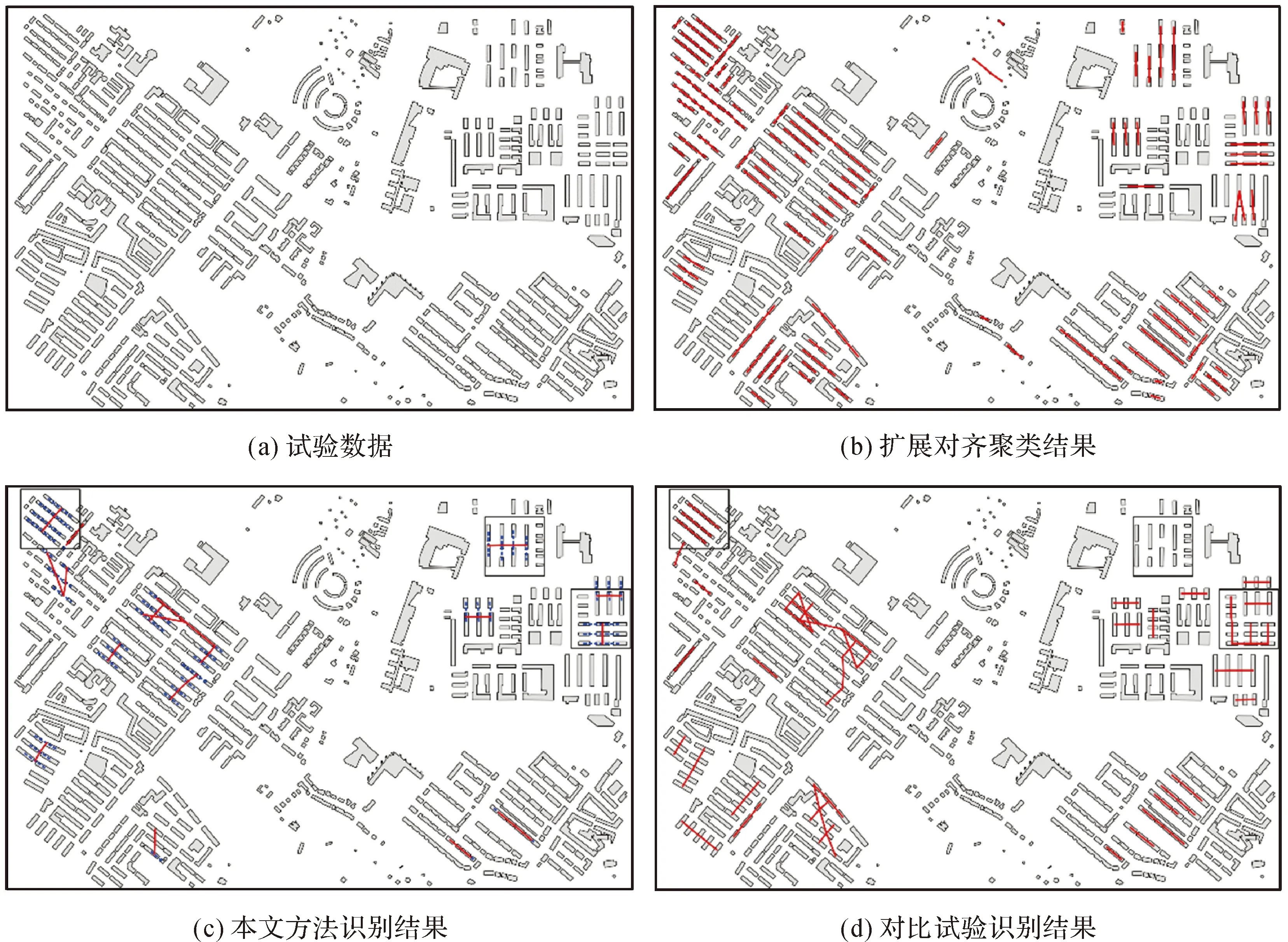
图7 组合直线模式识别试验结果Fig.7 Experiment result of combined collinear pattern recognition
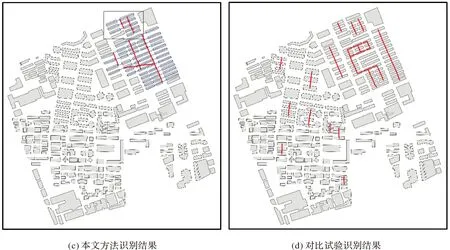
图8 组合直线模式识别试验结果Fig.8 Experiment result of combined collinear pattern recognition

表2 参数设置
对试验1的结果进行统计、对比分析可知,本文方法提取出18个组合直线模式,对比试验提取出46个简单直线模式,本文提取的组合直线模式中有15个与对比试验结果中29个简单直线模式存在相交或者包含的关系。其中有23个简单直线模式分别包含于12个组合直线模式,例如,图9(d)中的3个简单直线模式1、2、3分别作为模式构件完全包含于图9(a)中的组合直线模式1。其余6个简单直线模式与9个组合直线模式存在相交的关系,例如,图9(e)中简单直线模式1内有3个建筑物分别与其他建筑物组合成模式构件,形成图9(b)中的组合直线模式2。此外,本文方法提取出3个与简单直线模式无关联建筑物的组合直线模式,例如,图9(c)中形成组合直线模式的建筑物在图9(f)中与简单直线模式无关联。本文方法识别提取的组合直线模式基本符合“建筑物—模式构件—组合直线模式”的多层次认知特点,如图9(a)中以简单直线模式作为模式构件和图9(c)中由面积大小差异明显建筑物组合成模式构件,进而由多个具有相似特征的模式构件形成组合直线模式。对试验2的结果进行统计、对比分析可知,本文方法提取出6个组合直线模式,对比试验提取出21个简单直线模式,提取的所有组合直线模式与对比试验结果中13个简单直线模式存在相交或者包含的关系。分析可知,现有研究的直线模式认知特征和识别方法并不适用于组合直线模式,而本文所提方法则可以识别出局部异质性明显的建筑群内涵的组合直线模式。
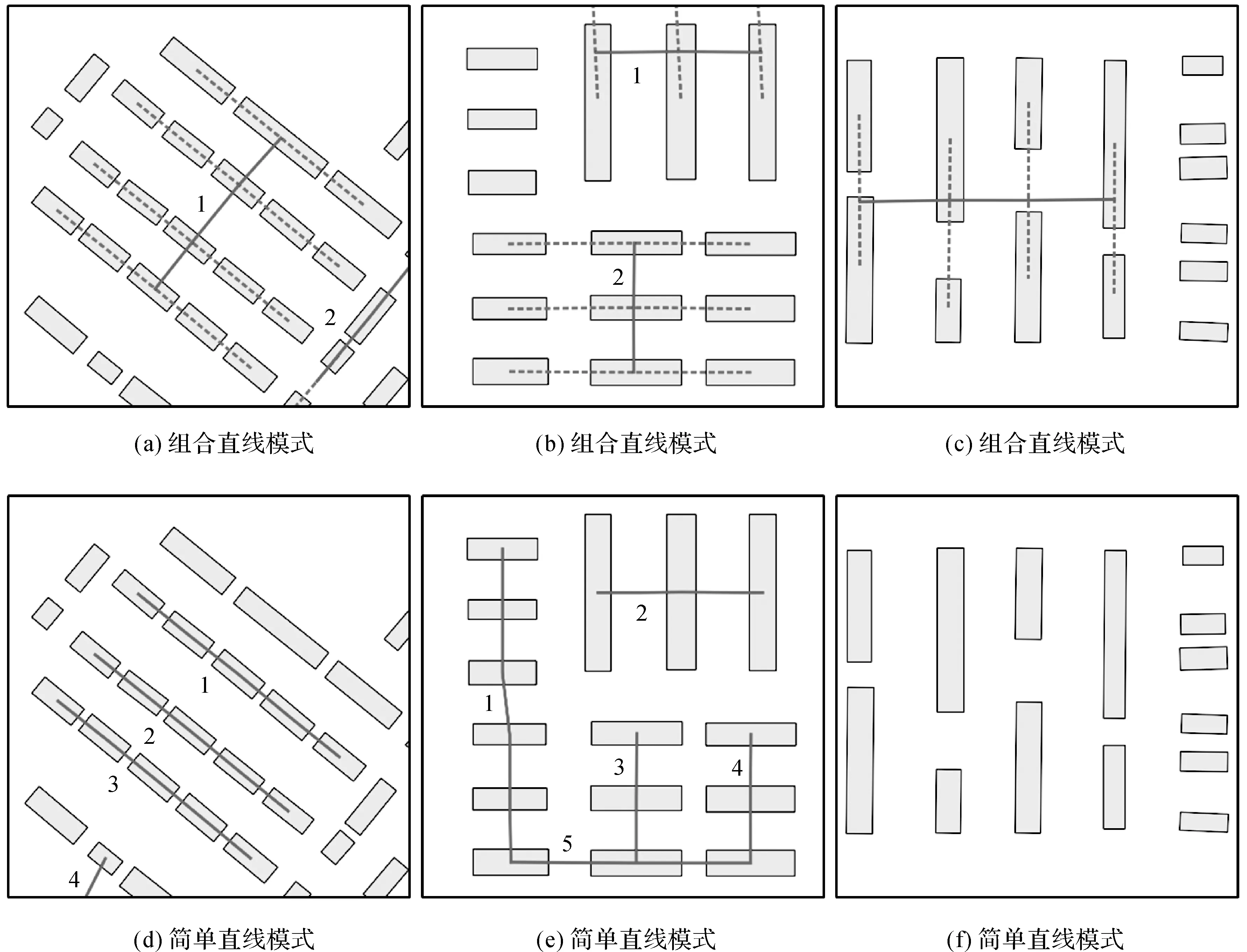
图9 试验结果细节对比Fig.9 Experiment result detail comparison
3.2 讨 论
3.2.1 环境上下文约束
本文提取直线模式时未顾及环境上下文的约束,如道路网、水系等地理要素对城市空间形态的划分,在实际应用(如制图综合、多尺度表达等)中可以根据实际需求,结合邻域环境约束对提取的建筑群组合直线模式进行分解与重构。
3.2.2 建筑物及模式的可组合性
视知觉拓扑理论认为人的认知具有“大范围首先”的性质[22-23],这解释了组合直线模式虽然在局部范围内存在一定程度的异质性,但在整体上符合直线模式认知特征的现象,反映了模式在认知意义上的整体性、组合性和层次性。本文所提的组合直线模式重点关注模式内建筑物的可组合性,可组合性主要通过两个条件判定,一是建筑物构成扩展对齐分布,二是建筑物之间具有一定的邻近程度。本文在识别提取组合直线模式时并未对邻近程度进行量化约束,因为邻近程度的考量需要结合实际应用环境,本文所提方法主要从技术的角度为识别提取组合直线模式提供一个可行的数据增强方案。对本文试验1中提取的组合直线模式内组合的建筑物间最短距离进行计算,统计结果如图10所示,其中最小值为2.5 m,最大值为26.0 m。以制图综合为例,建筑物之间的最小间隔通常为0.5 mm[26],如果综合目标比例尺为1∶25 000,则实际距离约束为12.5 m,由图10统计结果可知本文提取的组合直线模式中有61组组合建筑物符合邻近程度的约束,如果试验中加入距离约束条件Distance<12.5 m,则识别结果如图11所示,共识别出12个组合直线模式。
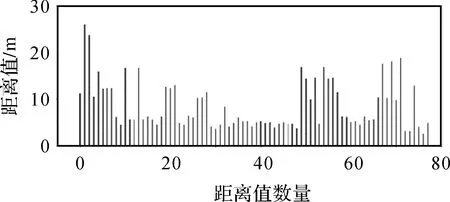
图10 组合建筑物最短距离统计Fig.10 Statistics on minimum distance between combined buildings
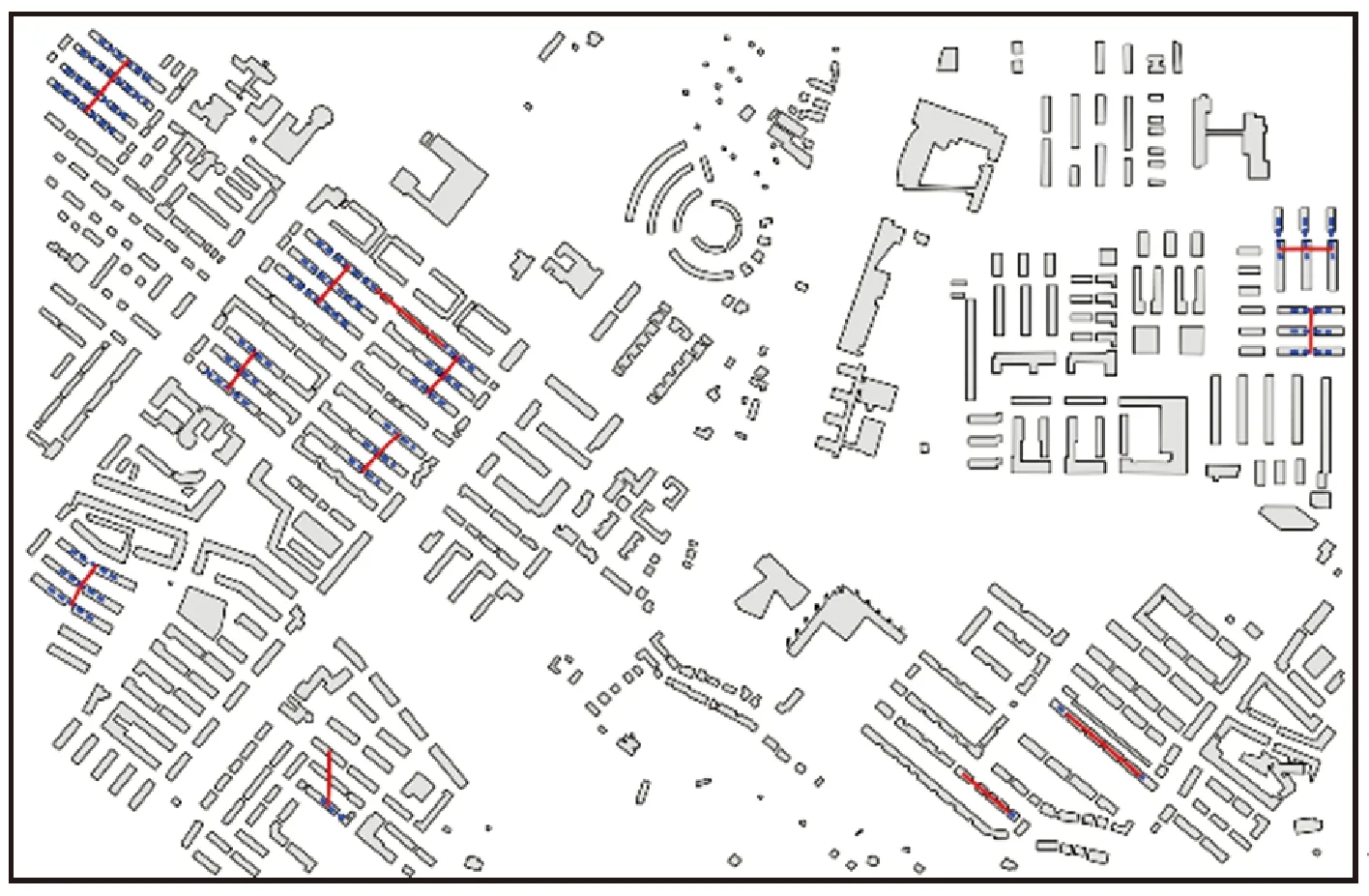
图11 考虑距离约束的组合直线模式提取Fig.11 Combined collinear pattern extraction considering distance constraints

建筑物的可组合性也可以延伸为模式与模式之间的可组合性,如图12(a)所示的组合直线模式完全由两个邻近且具有相似分布特征的简单直线模式(图12(b))组成。模式之间的可组合性对研究具有复杂组合形态和多层次性的直线模式具有重要的理论指导意义。
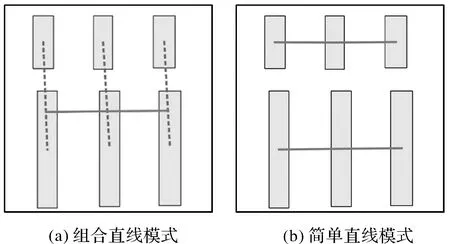
图12 模式间的可组合性Fig.12 Combination of different patterns
3.2.3 参数阈值
(1) 参数相关性方面。本文模式识别过程涉及多个参数,各参数是相互独立、互不影响的。首先,根据建筑物形状、尺寸和方向建立的不同类型参数是互不影响的;其次,每个类型之内的参数是相互独立、相互补充的。矩形度主要用来限定模式识别的对象为形状规则的建筑群;模板放大系数主要是考虑到模板匹配方法缺失一定的灵活性,因此对模板适当放大以扩大搜索范围,增大所提方法的灵活性;长度比和模板重合度虽然都涉及度量尺寸的大小,但模板重合度的主要作用是通过面要素的相交关系和程度确定符合要求的待匹配建筑物,长度比则主要通过度量建筑物间的大小差异来进一步匹配;对于局部方向差异和整体方向差异,局部方向差异是度量建筑物之间主方向差异的参数,反映了不同建筑物的方向相似性,整体方向差异是度量一个直线模式内建筑物的整体方向异质性,反映了整个模式的直线性,因此局部方向差异和整体方向差异是相互独立的参数。虽然在扩展对齐聚类阶段也采用了尺寸和方向方面的参数,但这些参数主要是用来确定作为模式构件的组合建筑物,而模式识别阶段采用的参数主要用来确定构成直线模式的模式构件。因此,本文模式识别过程中所用到的参数都是必要的且相互独立、互不影响。
(2) 参数阈值设置方面。阈值的设置主要以经验值为主,同时结合试验进行微调。基于大多数建筑物的规则性考虑以及组合直线模式对规则程度的依赖,本文在识别提取组合直线模式的过程中仅考虑矩形度较高的建筑物,在一定程度上损失了形状信息。长轴、短轴长度比作为控制形状、大小的参数,其阈值设置存在一定差异的原因是试验数据中延伸率[11]高的建筑物占据多数,相较于短轴,长轴维度的信息属于人类视觉感知认知过程中被优先传递的显著性信息。因此,长轴长度比的约束规则更为严格,阈值更大。阈值的调整需结合模式形态的侧重点,若仅考虑短轴长度比而忽略其他因素对组合直线模式的影响,如图13(a)、(b)、(c)分别为短轴长度比阈值取0.75、0.8、0.85的试验结果,对比发现随着短轴长度比阈值的收紧,由于短轴长度较大的建筑物被剔除,导致模式的退化。
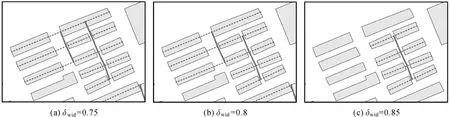
图13 短轴长度比影响Fig.13 Influence of minor axis length ratio
(3) 参数对数据、尺度的适应性分析。对于不同类型的数据,由于空间分布情况不同,参数的阈值可能需要调整,但必须符合模式的认知特征。所以对于不同的数据,参数阈值不会发生太大的变化。例如3.1节两组不同试验数据的参数阈值虽不相同,但整体变化并不大(表2)。对于不同尺度的数据,空间分布模式在空间认知上有“建筑物微观局部特征—街区形状特征—城市整体分布特征”的层次性,参数和阈值主要由模式的类型决定,如直线型建筑群、条带型街区和辐射型城市等。本文则主要研究微观局部特征明显的建筑物直线分布模式,结合3.1节不同尺度数据的试验结果,本文的参数适用于大比例尺建筑群的组合直线模式识别。
3.2.4 评估识别结果的可靠性
视觉认知易受人类的个体差异性和主观性的影响,因此对基于视知觉空间认知的模式识别结果的定量评价一直是该领域的难题。目前,通过与人眼识别的结果进行对比来评价识别结果是普遍被认可的方法[2,4,9,18-19]。本文通过问卷调查的方式评价结果的可靠性,调查对象为4名制图生产单位工程师,6名助理工程师和30名地图专业学生。分别对比3.1节两组试验数据的调查结果与所提方法的识别结果,以准确率和召回率对识别结果进行评价,评价结果见表3,结果表明本文方法的识别结果是可靠的。

表3 识别结果评价
4 结 论
目前,建筑群直线模式的研究仅考虑了模式内建筑物间的同质性以及模式内、外建筑物间的异质性。本文针对具有局部异质性的建筑群直线模式识别问题,提出基于模板匹配的建筑群组合直线模式识别方法。本文旨在提供一个建筑群空间分布模式识别的技术方案,在识别提取组合直线模式过程中未考虑组合建筑物的空间邻近程度和其他地理要素的约束,具体考虑的约束条件要结合实际需求,在以后的工作中会对此继续研究。此外,会进一步分析不同数据特点对阈值设置的具体影响,以及对复杂组合形态和多层次性的直线模式进行研究。
猜你喜欢
现代装饰(2022年3期)2022-07-05 05:58:44
智能建筑电气技术(2022年2期)2022-02-06 02:33:30
通信电源技术(2021年2期)2021-05-21 02:33:46
电子技术与软件工程(2020年22期)2021-01-30 05:29:42
数字技术与应用(2020年12期)2021-01-22 13:40:40
移动通信(2020年5期)2020-06-08 15:39:51
电子测试(2017年23期)2017-04-04 05:06:50
智能系统学报(2017年5期)2017-01-22 11:21:30
潍坊学院学报(2016年6期)2016-04-18 13:56:57
智能系统学报(2015年3期)2015-01-29 15:20:12
