输电线路通道倾斜摄影杆塔模型自动裁剪
2021-06-29 02:08宋金秀谭弘武张洪雷杨大兵
科学技术创新 2021年17期
宋金秀 谭弘武 王 成 张洪雷 杨大兵
(北京煜邦电力技术股份有限公司,北京100089)
1 倾斜摄影技术
1.1 简介。倾斜摄影技术是国际遥感与测绘领域近十几年发展起来的一项高新技术,该技术通过从五个不同视角(一个垂直、四个倾斜)同步采集影像,获取到丰富的建筑物顶面及侧视的高分辨率纹理。它不仅能够真实地反映地物情况,高精度地获取物方纹理信息,还可通过先进的定位、融合、建模等技术,生成真实的三维模型。该技术已经广泛应用于测绘、GIS、环境应用、城市和土地管理、灾害与应急、政府和公众数据信息、国土安全与国防、旅游、娱乐、科学分析、三维地图服务和三维导航等行业[1]。
倾斜摄影系统集成POS空间定位系统,辅助空间量测。倾斜摄影技术可同步获取同一地物的东、西、南、北、顶部方向的空间可量测影像,倾斜摄影快速三维建模数据形成多尺度、多类型、多内容的三维地理空间数据,该数据不仅拥有准确地物地理位置坐标信息,并且可精细的表达地物的细节特征,包括突出的外墙和屋顶、建筑物的观赏性功能,以及地形地貌等精细特征[2]。

图1 倾斜摄影影像获取示意图
1.2 技术流程。采用倾斜摄影技术进行三维建模的后处理软件以法国ASTRIUM公司的StreetFactory和Acute3D公司的Smart3DCapture软件为典型代表[2]。利用地物的垂直与倾斜影像以及少量的地面控制点,构建基于真实影像纹理的高分辨率真三维模型[3]。
倾斜摄影测量技术通常包括影像预处理、区域网联合平差、多视影像匹配、DSM生成、真正射纠正、三维建模等关键内容其基本原理如图2所示。

图2 倾斜摄影模型技术流程
但进行影像数据采集时,对杆塔、电力线、绝缘子串等模型部件,所采集到的影像数据较少,因此对此类模型进行建模时,并不能保证模型的完整性。为了提高输电线路通道倾斜摄影三维模型成果展示效果以及后续与激光点云数据、其它三维模型叠加展示效果的提升,利用杆塔坐标构建出杆塔模型的外包围盒从而实现对不完整杆塔模型的裁剪。
2 数据自动裁剪
2.1 数据格式
本文对数据进行裁剪的类型为3D Tiles格式,是用于流式传输大规模异构3D地理空间数据集的开放规范。在3D Tiles中,瓦片集是用树形空间数据结构组织的瓦片集合。每个瓦片都有一个包围体完全包围它的内容。树具有空间相干性,子瓦片的内容完全包含在父瓦片的包围体内。为了满足灵活性的需求,树可以是任何具有空间相干性的空间数据结构,包括k-d树、四叉树、八叉树、格网。数据组织结构如图3、4所示。

图3 3DTiles

图4 Tileset.json
tileset.json称为瓦片集数据,是对整个瓦片集的说明以及瓦片的空间组织结构的存储,瓦片数据负责存储单个瓦片内的所有三维地理信息数据。root对象即这个数据集的根瓦片,每个3dTiles数据集必须有一个root对象,root瓦片及其children空间组织结构允许数据集使用如下几种树结构:四叉树、八叉树、KD树、格网结构。本文所采用的空间数据组织结构为八叉树,如图5所示。

图5 八叉树组织结构
在对瓦片进行裁剪时,以tileset.json数据文件为入口,利用tileset.json文件树结构和杆塔包围盒、瓦片的包围盒进行相交判断出需要裁剪的瓦片。为了提高空间相交判断的准确性,其中杆塔与瓦片的包围盒均采用OOBB包围盒。
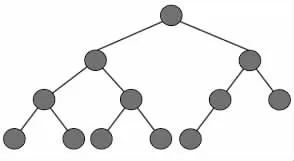
图6 瓦片树结构
2.2 算法流程
本文设计的数据结构如下:

表1 相交类型
此结构体主要为了判定OOBB包围盒空间位置拓扑类型。

表2 OOBB包围盒
OOBB包围盒结构体,筛选出需要裁剪的瓦片,数据来源为杆塔包围盒与瓦片的包围盒。

表3 Pla n平面
平面结构体,以平面为单位对模型数据进行裁剪,数据来源为杆塔包围盒的6个面。
算法流程图如下:

图7 算法流程图
首先利用tileset.json和需要裁剪的杆塔坐标,构建出瓦片和杆塔的OOBB包围盒,相交判断由瓦片的6个面依次与杆塔有向包围盒进行相交判断,如果6个面都与OOBB相离则为相离,6个面都与OOBB是包含关系则为包含,否则为相交。进行相交判断时,利用tileset.json组织的树结构,如果父节点与杆塔的包围盒相交,则遍历子节点,否则终止遍历,此过程为迭代过程。
相交判断过程完毕后,利用杆塔包围盒的最大、最小点构建出包围盒的6个面,依次对需要裁剪的瓦片进行裁剪,保留面外部的瓦片数据,遍历完需要修改的瓦片集合后,瓦片裁剪过程完毕。
猜你喜欢
卫星应用(2022年1期)2022-03-09
扬子江(2021年4期)2021-08-09
小学生学习指导(高年级)(2021年6期)2021-06-19
小学生学习指导(高年级)(2020年6期)2020-07-07
电子制作(2019年11期)2019-07-04
散文百家(2019年2期)2019-03-13
扬子江(2019年1期)2019-03-08
小学生学习指导(高年级)(2018年3期)2018-01-24
小猕猴智力画刊(2017年5期)2017-05-25
科技与创新(2015年9期)2015-06-02