
湾外底层水域网箱养殖浮式自动投饵系统设计与初步试验
2021-06-29 02:07蔡文鸿郑国富姚桂祥林元俊魏盛军陈思源
渔业研究 2021年3期
蔡文鸿,郑国富,姚桂祥,林元俊,张 哲,丁 兰,魏盛军,陈思源
(福建省水产研究所,福建省海洋生物增养殖与高值化利用重点实验室,福建 厦门 361013)
近年来,随着国内外各种大型养殖设施的建造,养殖业开启了进军深远海、拓展湾外海域养殖空间的序幕[1-3]。开展湾外及深远海域名优水产品养殖,是打破因当前浅海养殖仍然只能集中在港湾及近岸海域内[4-5]而造成浅海养殖业“港湾养殖超负荷、近岸养殖超饱和、湾外离岸养殖开发严重不足”结构性瓶颈的主要措施,也是调整海水养殖业生产结构、推进海水养殖业供给侧改革、加快海洋生态文明建设、提升海水养殖产品食品质量等的有效途径,更是变海域资源优势为产业经济优势,推动“蓝色粮仓”建设的有力抓手。然而由于国内沿海大陆架坡度较平缓的原因,大部分目标养殖海域(水深一般30 m以上)距离陆地较远且风浪都比较大,并且对于其没有建造智能管理平台(人员居住平台)的一般湾外养殖设施来说,日常的养殖管理(如投饵)需要开船至养殖海域进行作业,一方面能耗比较大,不利于成本的核算,另一方面如遇到台风等恶劣天气无法出海时,设施中的养殖对象将无法正常摄食饵料,也会给养殖生产造成损失,因此,作为养殖设施的配套装备之一,自动投饵系统就应运而生。目前针对这方面的研究和开发,国内外已有较多的典型案例和成果[6-9],但是一般针对池塘养殖、陆基工厂化养殖或海面大型抗风浪网箱养殖,其主要目标为减少投饵过程中的劳动力(搬运饵料)和劳动强度,无法为位于底层水域的网箱投饵。而笔者所在的研究团队所开发的自动投饵系统主要用于满足湾外开放性底层水域升降式刚性网箱的自动投饵要求,但由于该网箱位于湾外恶劣海况的底层海域,平均深度达30 m以上,而且不适合高频率地浮出水面进行投饵。目前对于这类网箱投饵系统的研究较少,如意大利Techno SEA公司[10]研发出用于当升降式网箱或沉式网箱沉降到海面以下时仍可为网箱自动投饵的投饵机:Subfeeder-20,但是该投饵机属于沉式类型,其材质为HDPE(高密度聚乙烯),抗风浪性能比较弱,而本研究团队所研制的投饵机属于浮式钢制结构,因此,开展湾外底层水域网箱养殖自动投饵技术与装备研究,对拓展湾外养殖空间、推动湾外高端养殖装备、完善湾外养殖技术、提高饲料利用率、提升养殖效率具有重大意义[11]。本文描述了投饵系统的设计开发和初步试验,旨在为相关投饵系统的设计推广应用和深化研究提供参考。
1 系统方案的设计与分析
1.1 开发方案
本文所开发的浮式自动投饵系统主要用于湾外底层水域升降式刚性网箱养殖的投饵需求,因此综合实际养殖海域的海况、水层以及网箱的结构等因素,制定以下相关开发流程,其流程如图1所示。

1.1.1 鱼类饥饿感及饱腹感的行为规律研究
结合相关文献资料并对当地主导养殖品种(1~2种名优养殖鱼类,如大黄鱼、石斑鱼等)进行长时期的观察记录研究,掌握1~2种养殖鱼类饥饿感及饱腹感所表现出来的行为特点及规律,确定最适合的人工配合饲料、每日适宜投饵时间及投饵量。
1.1.2 投饵原理及结构技术研究
查阅相关投饵技术文件及利用所积累的研究经验,提出多种投饵方式及原理,然后通过计算机建模及样机模型试验,以鱼类的生长指标和劳动量及其成本为对照,对所研制的新型全自动投饵系统与传统的投饵作业方式进行对比,选出最适合湾外底层水域养殖特点的投饵原理及结构,并制定相关标准及工艺流程等技术。
1.1.3 投饵系统定型及设计分析
根据上述试验研究结果,设计湾外底层水域主导养殖品种自动投饵系统功能及主体结构,分析其水动力学性能;设计自动投饵系统自动控制技术与执行装备;设计自动投饵系统动(电)力保障系统;设计水面浮式投饵系统向水下养殖网箱的定点投饵技术与装备。
1.1.4 固泊系统研究
根据海区环境条件及底层水域网箱的性能特点等,设计自动投饵系统的固泊系统,保证既不影响网箱和投饵系统结构安全,又能满足定点投饵要求。
1.1.5 海上试验优化与应用
试制样机开展海上应用研究与优化试验,并最终示范生产。
1.2 系统设计与分析
1.2.1 系统原理设计
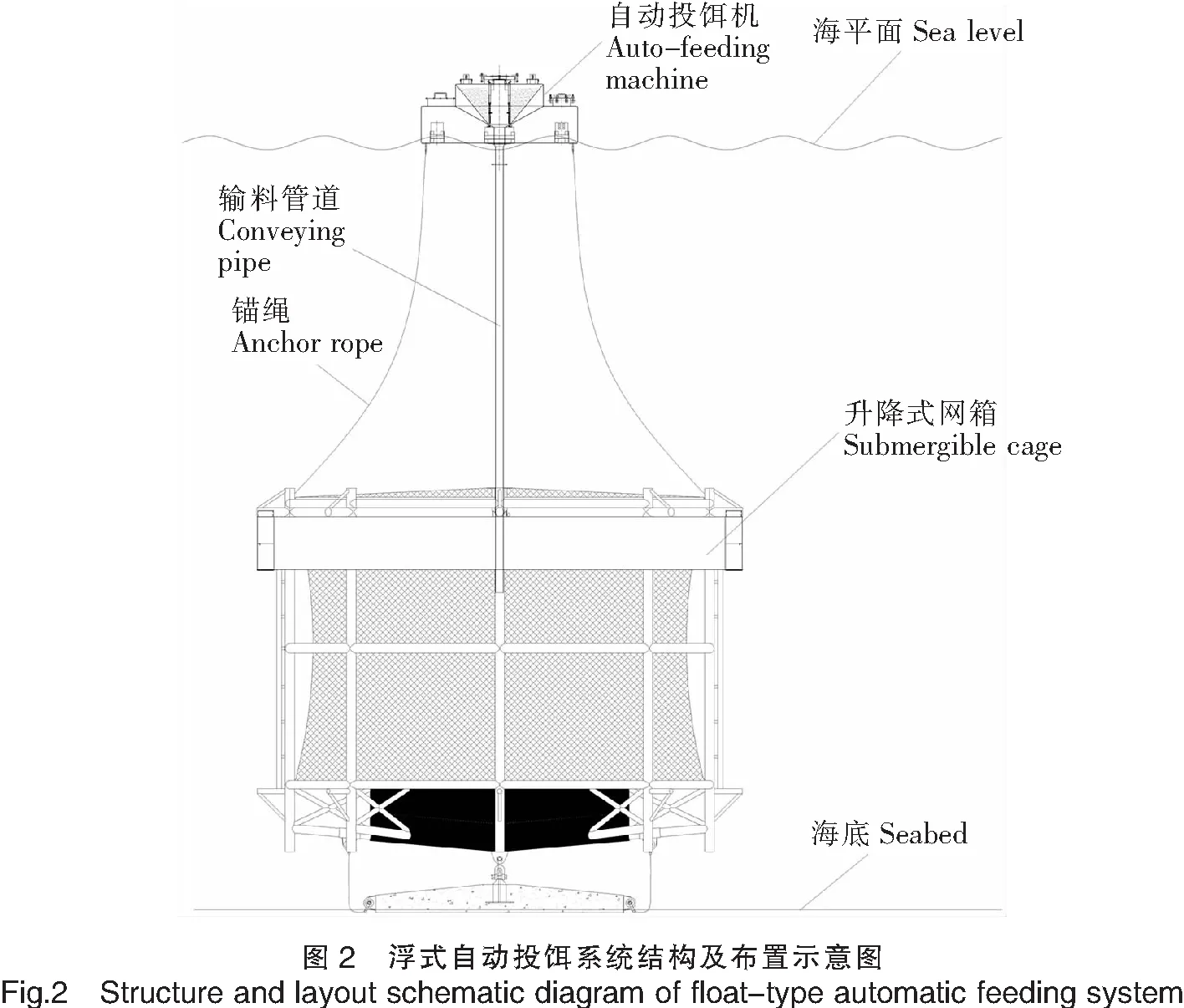
浮式自动投饵系统可根据程序设定(可调)实现每天定时(投饵时间、投饵持续时间)、定点、定量向位于底层水域的网箱内投放颗粒饲料,满足养殖鱼类生长需求,改善鱼类养殖效果。其每日投饵时间、投饵量等参数可根据鱼类生长阶段对饲料的不同需求及时进行调整,考虑到底层网箱养殖生产管理的特殊性和实际海况的复杂性,所研发的浮式自动投饵系统必须实现设备自身提供动力、离岸式自动控制、且性能稳定的技术目标,本研究团队对该系统的组成和布局进行了初步设计,该系统由控制、供料、输料、动力和固泊等5个子系统组成,总体构成如图2所示。
该自动投饵系统应用于湾外底层水域网箱养殖,因其所服务的养殖设施及其自身所处的水域环境特点以及养殖鱼类品种所特有的摄食规律,使得该系统的研制存在以下技术难点及问题:1)水下定点投饵技术与装备,如何保证位于海面上的自动投饵装备能在潮流、波浪等作用下准确把饲料投放到位于底层水域的网箱内;2)如何设计在大潮差环境(当地海域潮差7 m左右)及网箱升降作业下,既保证输料管道安全,又不会对网箱结构特别是网衣箱体造成损坏的新型饲料输送通道结构与制造材料;3)自动投饵系统的固泊系统,如何保证自动投饵系统与位于底层水域网箱在当地潮差大的环境条件下具有正确的位置关系,既满足正确投饵要求,又保证不互相影响而发生破坏;4)养殖对象对饵料及供饵要求。下文将围绕这些瓶颈问题对该系统进行设计分析。
1.2.2 投饵机结构设计分析
离岸型浮式自动投饵机作为湾外深远海底层水域网箱养殖的配套装备,其结构如图3所示,采用钢结构密封制成,并刷涂防腐蚀及防污损生物附着油漆,主要结构由储料仓、仓门、直流电动推杆及设备仓等组成,设备仓用于安装布置电控箱及蓄电池组等设备,配合密封橡胶圈和仓盖防止海水渗透进去,并根据整体的重心分布,合理调整各个零部件的安装位置,从而平衡整个投饵机。该投饵机具有4个独立的储料仓,每个储料仓配置单独的仓门及控制仓门启闭的直流电动推杆,考虑到储气罐在海上存在气体容易泄露及安全隐患等问题,故将仓门的动作执行器由气缸改为直流电动推杆,相应仓门的启闭方式由扇形摆动改为上下运动,避免仓门被饲料卡住而无法关闭,进一步优化了投饵技术,通过调节电动推杆行程实现仓门开启的大小,从而控制饲料的投放量,而储料仓中的沉性配合饲料在重力的作用下通过出料口经由输料管道输送至网箱的特定位置供养殖对象摄食,一般情况一个储料仓可保证养殖对象1 d的饵料需求,因此该投饵系统具有储备4 d的饵料容量,后续可根据需求增加储料仓数量及容量以应对不同的环境条件,从而扩展应用范围。饵料采用人工配合饲料取代冰鲜小杂鱼作为鱼类养殖主导饲料,根据养殖对象(鱼类)行为状态及摄食规律,调节储料仓门的开启行程、开启时间、启闭间隔时间等参数,使饵料得到最大的利用,降低饵料的损失率,保证鱼类正常摄食。设备仓中的蓄电池组为整个系统的电力提供保障,优化选配能耗较低的零部件,从而降低蓄电池组更换的频率。通过内置可编程控制器(PLC)元器件,根据特定的养殖对象及其生长阶段,编辑相关饵料需求程序,实现一系列精确的动作,从而保证饲料的按需供应。结合储料仓设定供应天数的计算,待饲料投尽时,只需出海一趟灌满储料仓,即可进行下一个投喂程序的循环,从而节省船只来往目标养殖海域的次数,减少劳动力及降低劳动强度。


1.2.3 PLC控制系统设计及零部件配置分析
此投饵系统采用PLC作为控制核心,可以按照养殖对象摄食规律进行事先编程,从而自动控制系统中各个设备的启闭时间、间歇时间等动作,实现全自动对目标水域进行定时、定点、定量投饵,保证投饵行为准时且精确,满足湾外投饵的要求。要实现整套系统的定时自动启动并完成上述工作流程,必须使被控各部件协调工作,完成一系列的动作程序,并明确各动作之间的连锁关系,保障投饵系统运行的安全性和动作的准确性[11-12]。
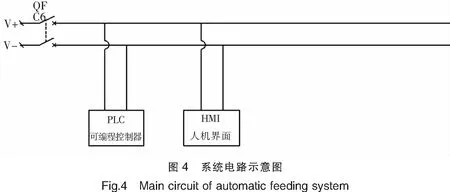
控制系统的构建包括硬件方面的电气元件组成和电路的设计以及软件方面控制程序的编写和调试。整个系统的电力由内置电压为24 V、容量为100 A·h的蓄电池组所提供,主要用于PLC、HMI(人机界面)及直流电动推杆,直流电动推杆选用PFS-90型,并选用6A的2P断路器作为系统的总开关,系统电路为直流电路,如图4所示,可保证整个设备和系统在海上的安全性。
由于本自动投饵装置动作比较简单,所控制的零部件较少,采用PLC控制需要的输入输出点数较少,因此,PLC控制器选用Haiwell(海为)T48SOR型可满足上述功能的要求。PLC控制器通过中间继电接触器控制直流电机的正反转带动与储料仓仓门相连接的电动推杆伸缩,即仓门的升降,从而达到自动投饵的目的。所设计的PLC控制电路原理及输入输出端口接线如图5所示。PLC输入电源为24 V DC,输出公共端C0-C4接V-,输入公共端S/S接V+。输入点为外部按钮和选择开关输入到PLC,以控制仓门的开关、手自动切换以及启动和停止功能,输出点即引入中继的线圈,通过中继的常开点,来控制仓门的开启和关闭。

因此,设计了系统关键设备控制方案并编写了相关控制程序。此外,综合考虑人机工程,进行了相关HMI配置及设计,首先需要设置和PLC关联的通讯资料格式,然后进行相关参数的设计:每个仓的推杆动作手动操作、半开(引诱投饵)和全开(正常投饵)模式下的循环次数、运行时间和停止时间。从而实现可根据实际养殖情况和需要在人机界面进行相关投饵参数的设置,使得该系统更加灵活。
1.2.4 饵料投喂方式设计分析
由于湾外底层海域升降式刚性网箱在养殖过程中始终处于近似“坐底”状态,且平均深度达30 m以上,只有在检查箱体、捕获养殖对象等必要情况时,才需要将其升至海面,因此所需饵料须为人工沉性配合饲料颗粒,并且不适合利用抛洒(喷洒)方式进行投喂。在本投饵系统设计之初,饲料的输送和投喂方式不同于以往其他投饵系统的气力输送和喷洒方式,而是利用沉性饲料颗粒自身重力的作用向网箱内部投放饲料,虽然投喂速度比较慢,但可避免饲料颗粒的机械损伤和热损伤,并可通过对储料仓中进料口及仓门的橡胶密封处理以减轻饲料受潮程度,从而提高饲料的利用率。如需提高饵料的抛洒面积及投喂速度,可考虑利用水泵产生的高压水流混合饲料冲入输料管道,再从喷嘴直喷洒于网箱内部任意位置水体中,以实现投喂。
至于配合饲料及每日每次投放量的选择,应根据养殖对象摄食规律(养殖品种、养殖规模和生长阶段等)和当地海域环境条件作出合理配置,上述变量的调节可通过本投饵系统中的PLC程序来控制开启仓门的大小、开启时间、关闭时间等参数进行实现,使可调节行程的直流电动推杆具有类似计量投饵量的功能。通过引进PLC控制单元,提高了整个系统的灵活度及应变适应能力。
1.2.5 投饵机固泊系统设计分析
本浮式自动投饵系统由于是作为湾外底层水域升降式刚性网箱的配套装备,考虑到其使用环境的恶劣性以及所服务网箱的特殊性,投饵机不仅需要固泊于湾外及深远海域且适当保持在网箱上方的海面上,而且能防御目标台风袭击破坏(当台风强度超过预定目标时,可事先将其拆卸并转移至陆地上,待台风过后再重新安装),从而设计出满足海区环境和网箱升降作业要求的自动投饵机固泊系统。利用刚性网箱牢固的固泊系统,将投饵系统中的投饵机通过四组钢丝绳系绑在刚性网箱的主体结构上,起到固泊和增加整个系统可靠性的作用,但钢丝绳的长度需预留出最大潮差的余量。
1.2.6 输料管道设计分析
该自动投饵系统中漂浮在海面的投饵机与位于底层海域的网箱需设计输料管道,作为沉性配合饲料从投饵机出料口至网箱内部进行自然下落运动的通道,其结构、材料、尺寸、布置等技术参数受海流、波浪、相对位置等环境影响。通过研究当地试验海域潮差大(最大超过7 m)、潮流急、网箱所处海域深(30 m以上)以及底层水域网箱需升降作业等对饵料输送通道的影响,设计了在大潮差环境及升降作业下,既保证输送通道安全、又不会对网箱结构特别是网衣箱体造成损坏的新型饵料输送通道结构与制造材料。输料管道采用PVC钢丝(增强)管,为三层结构,内外两层是PVC软质塑料,中间一层是钢丝增强结构,或者是钢丝网或者是螺旋钢丝。PVC钢丝管由于采用新型的PVC增强型材料并内嵌高强度防腐蚀钢丝骨架,使其在抗压能力、抗扭曲能力、强度、硬度和质量上有了显著的提高,并具有高弹性、柔韧性好、弯曲性能佳、耐腐蚀、抗疲劳、材料无毒性、使用寿命长、不断裂、抗拉性、防水性等多项特点,可抵抗和满足海流急、潮差大、底层海域水压强的海况环境及工作条件,并且作为一种柔性耐压管件安装于输料系统中,可用于补偿管道或机器、设备连接端的相互位移量以及在网箱浮出水面时的弯曲量。
考虑到在投喂过程中存在潮差问题,现提供两种输料管道在网箱内部的布置方式:1)位于网箱内部的部分输料管道采用无固定方式,这种方式需考虑网箱内部高度方向的空间超过最大潮差量,以避免输料管道在最高潮时脱离网箱和在最低潮时严重触底,此外还需在输料管道末端加设沉块,并在网衣箱体与输料管道接触处加设防磨损装置;2)将输料管道的末端固定在网箱内部,这种方式会导致网箱与水面之间的输料管道弯曲或偏移严重,可将部分PVC钢丝(增强)管替换成HDPE管,从而减轻管道弯曲程度以降低对饲料下沉速度的影响,并可在输料管道靠近投饵机出料口的合适位置设置快速接口,当网箱上升或下降时实现快速断开或接通。
2 初步试验
项目组在石狮市渔业机械加工厂对该系统的投饵机进行初步试验,下文将对试验情况进行说明。
2.1 试验项目
1)投饵机PLC程序及性能检测。
2)储料仓不同开口形状的落料试验。
3)不同牌号颗粒饲料的陆地投饵适应性试验。
4)实况投饵程序初步试验。
2.2 试验过程与结果
2.2.1 投饵机PLC程序及性能检测
该投饵机的PLC程序按照4个储料仓每个仓负责1 d投喂量的方式进行编辑,即1 d 1个仓进行自动投料,每仓开始投料的间隔时间为1 d加上潮差,即约24小时45分,比如,第1天第1仓开始投料的时间是上午7点,第2天第2仓开始投料的时间是上午7点45分,第3天第3仓开始投料的时间是上午8点30分,第4天第4仓开始投料的时间是上午9点15分,第5天是1个循环结束,待加满饲料,重新开始循环重复上述过程。通过现场检测,电动推杆及仓门等一系列动作精准到位、性能达到所设计要求。
2.2.2 储料仓不同开口形状的落料试验
试验用饲料采用厦门嘉康饲料有限公司生产的石斑鱼沉性人工配合饲料,经检测,部分牌号饲料的参数见表1。

表1 石斑鱼沉性配合饲料参数表
表1中,真密度是指饲料的实际密度。堆积密度为疏充填堆积密度,是指把散粒材料或粉状材料自由填充于某一容器中,在刚填充完成后所测得的单位体积质量。
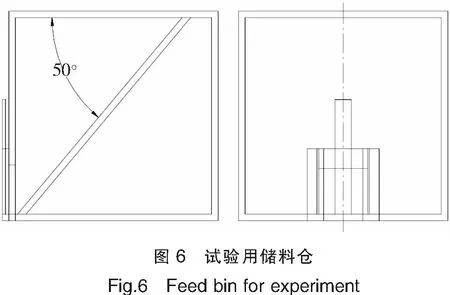
储料仓不同开口形状的落料试验用饲料为11#石斑鱼沉性配合饲料,试验用的储料仓尺寸:600 mm×600 mm×600 mm,底面倾斜度约50°,容量为39.12 kg,如图6所示。
试验结果见表2。

表2 储料仓不同开口形状的试验结果
表2中数值取平均值,由于现场无法对饲料进行标准松散充填,故储料仓容量与计算得出的数值有偏差。从储料仓不同开口形状的落料试验可见:梯形仓门的投饵能力变化不大;矩形仓门开口高度为140 mm的投饵能力是开口高度为70 mm的2倍左右,开口高度的变化对投饵能力效果明显;三角形和倒三角形仓门无法落料,因此矩形更适合作为储料仓门的开口形状。
2.2.3 不同牌号颗粒饲料的陆地投饵适应性试验
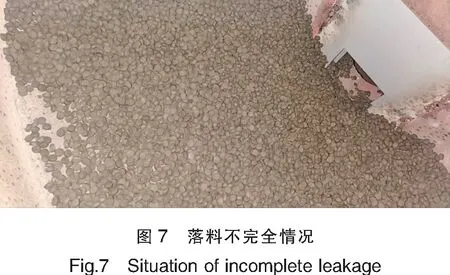
试验用储料仓为浮式自动投饵系统的投饵机储料仓,试验初期,储料仓底面的倾斜度:29°,整体储料仓容积:0.42 m3,整体储料仓容量:268 kg(6#饲料)。经过试验发现,存在由于底面倾斜度不够及门侧边的死角导致饲料无法落料完全的现象,如图7所示。
针对该问题,项目组优化储料仓结构,通过计算和前期试验,将储料仓底面倾斜度提高至约50°较为适宜,仓门口仍为矩形:高90 mm×宽100 mm,此时整体容积:0.23 m3,整体容量:
164 kg(6#饲料),虽然容积容量有所减少,但可使饲料落料完全,如图8所示,后续可根据要求通过加高加宽储料仓等措施调整容积。
此外由于投饵机底部出料口的截面积比仓门口的小,对饲料的落料速度产生影响,故加大出料口的截面积。

对优化后的投饵机开展不同牌号饲料的陆地投饵适应性试验,试验结果见表3。

表3 陆地投饵适应性试验结果
表3中数值取平均值,由于现场无法对饲料进行标准松散充填,故每仓容量与计算得出的数值有偏差。引诱投饵能力是指投饵前期短暂、高频率、小口径地开启仓门,用于吸引养殖对象过来摄食的单位时间饲料投放量,此时仓门开口尺寸:60 mm×100 mm。正常投饵能力是指养殖对象正常摄食状态下的单位时间饲料投放量,此时仓门开口尺寸:90 mm×100 mm。
2.2.4 实况投饵程序初步试验
根据试验得到的数据,将整个投饵阶段分为前期引诱投喂阶段及后期正常投喂阶段较为合理,以此编程并开展4个储料仓4 d的全自动程序模拟实况投饵试验,经过现场观测及测量,投饵机能按照设定的程序准确完成。至于实况海上投饵的开始时间、投饵时间、间隔时间等参数可根据实际养殖对象品种、数量、规格等情况现场设定,从而实现在恶劣的天气和海况条件下的自动投饵,是一种全天候的自动投饵系统。该系统可以用于将各种类型和各种大小的饲料颗粒投喂给不同品种的养殖对象(鱼类)。
3 讨论
本文所开发的新型浮式自动投饵系统,满足湾外及深远海域名优鱼类养殖存活及生长要求,解决湾外及深远海域因海况恶劣、路程遥远导致无法保障饵料安全和及时供应及往返路程耗时长、燃油费用高等制约瓶颈,提高养殖生产效率、显著降低养殖生产过程管理费用,提高湾外及深远海域名优鱼类养殖经济效益,推动湾外及深远海域名优鱼类养殖产业化发展。
3.1 优点
1)由于该自动投饵机利用其自身的浮力,使其始终漂浮于海上,且无需与陆地进行电缆或管道连接,具有远离陆地的离岸式功能;其自身采用钢质材料全封闭结构,具有抵抗湾外海水及盐雾腐蚀、强烈台风、强风浪流等恶劣海况的性能;投饵机所需动力来源于其内置蓄电池组,投饵过程及非投饵时期能耗较低,如后期增加小型风能、太阳能或波浪能等能量收集装置,可使其运行时间更长,避免更换蓄电池的麻烦;该投饵系统结构简单,精密零件较少且不影响其精确的投饵性能,海上故障率低,避免受海上不确定因素的干扰和破坏。
2)作为养殖配套设施之一,投饵装备应跟随网箱养殖等养殖设施的发展而不断发展,即需与养殖网箱的模式相匹配,才能具体解决实际投饵需求,而本自动投饵系统虽适用于湾外底层水域网箱的投饵机制,但是通过简单的改造可将该系统进一步升级,根据用户的实际需要对投饵系统进行扩展、修改和强化,同样也适用于离岸较远的大型深水网箱等养殖设施的投饵需求,扩大了其适用范围,并且随着开放性海域养殖设施数量的增加,养殖设施大型化、智能化、离岸深远化的趋势,可发展为以海上平台为基础由计算机控制的智能投饵系统,该系统完全可以为远离陆地的多个养殖设施同时进行无人智能化投饵,进一步拓展养殖空间和领域。
3)该自动投饵系统可根据目标养殖海域的环境条件及养殖对象的生理状态,通过PLC以及HMI,及时调整饲料的投放量、投放时间及投放频率等参数,减轻了湾外养殖劳动强度,提高了饲料的利用率,降低了养殖成本,使湾外养殖效益最大化和整套养殖系统效率的最优化,提高了养殖产品的质量。
3.2 有待改进之处
文中自动投饵系统尚处于开发阶段,属于小型化的样机雏形,储料量较小,若要在该底层海域大型刚性网箱上使用,必须加大该投饵机的储料量,或者将多套投饵机组合成系统,而且所开展的投饵试验也只是初步小规模,还需进行水池及海上投饵试验,增加和扩大试验次数和范围,为后续继续优化提供基础数据,因此距离实际投入生产应用还有许多问题需要深入研究解决,例如针对养殖设施的不同模式及养殖对象的不同种类、不同生长阶段、不同数量等级等,其所需的饲料类型、大小、品质特性也随之变化,从而导致饲料的运输、储存、输送、投放等方式也随之改变,与其配套的投饵系统的工作原理、结构形式、控制程序、实现方式等也需要进行修改和验证;随着不同投喂水域深度及养殖环境的变化,输料管道、固泊设施等硬件配置也将随之变化,二者之间的影响关系有待进一步试验研究等等。
此外,由于养殖对象对饵料的需求规律、生长速度及其饵料转化率都随着现场水域环境和气象条件(包括水温、水质、盐度、溶解氧浓度、流速、气温、光照强度和白昼的长度等)的改变而改变,而且也与饲料的品质和养殖对象的生理因素(如年龄、成熟度、性别、激素水平以及内源性的生长规律等)等密切相关[12-17],而本文所开发的自动投饵系统未对目标海域环境因子及网箱中养殖对象进行时时详细的监测和数据采集,且需在现场设置参数,因而其还只是属于传统的自动化投饵系统。因此,下一步的工作重点将增加远程无线传输网络技术,从而实现远程控制操作,以及围绕上述数据的收集、反馈和处理,结合本自动投饵系统进行综合集成优化,并配套中央学习处理系统,使该自动投饵系统更具智能化、智慧化,进一步升级为投饵综合管理系统,可根据收集到的数据进行处理并反馈到控制系统,通过“学习”能力自动调整投饵程序,以满足饲料需求的任何变化,也可供养殖管理人员参考决策和远程遥控,减少管理人员的劳动力。
猜你喜欢
今日农业(2022年15期)2022-09-20
当代水产(2022年7期)2022-09-20
新农村(浙江)(2022年5期)2022-05-19
当代水产(2022年3期)2022-04-26
渔业现代化(2022年1期)2022-03-10
草原与草业(2021年4期)2022-01-13
今日农业(2021年1期)2021-03-19
文萃报·周二版(2019年30期)2019-09-10
股市动态分析(2015年29期)2015-09-10
科学种养(2014年8期)2014-08-22
