一种视觉识别和语音控制并能行走的垃圾桶
2021-06-29 02:08廖永盛吕泽然
科学技术创新 2021年17期
任 帅 廖永盛 吕泽然
(黑龙江科技大学,黑龙江 哈尔滨150027)
垃圾桶是一种存放垃圾的容器,在人们生活中有着重要应用,通常人们将垃圾短时间的存放在垃圾桶中,从而保持环境的整洁,同时方便进行处理。当前,大多数垃圾桶为金属结构,或者塑胶结构,人们在使用过程中会放入塑料袋,在垃圾够多时就一起丢掉。大多数垃圾桶,在设计时为了防止垃圾的异味四散,影响环境,都设置了桶盖,有些垃圾桶则可以通过脚踏开启。总的来说,现有的垃圾桶初步满足了人们存放垃圾的需求,但是并不智能,或者智能化程度低。随着社会的不断发展,智能化水平不断提高,传统的垃圾桶已经不能够完全满足现代人的使用需求,在这样的背景下提高垃圾桶的智能化水平,成为了垃圾桶发展的重要方向。本文设计了一种具有智能识别、语音控制并且可以行走的垃圾桶,可以更好地满足人们的使用需求,给人们提供更加良好的使用体验。
1 智能垃圾桶的设计
本文设计了一种具有视觉识别和语音控制并能行走的垃圾桶,主要包括垃圾桶主体、机械爪和垃圾桶主体行走台等部分。垃圾桶主体安装于垃圾桶主体行走台的顶部,垃圾桶主体由垃圾桶外桶体、垃圾桶内桶体、下位机和伺服电机一组成,所述垃圾桶内桶体的内部设置有四个大小相等且等间距圆周分布的收容室,桶内桶体设置于垃圾桶外桶体的内部。主体的外部两侧侧面固定安装有机械爪,机械爪上设置有光电传感器,主体的顶部设置有摄像头一,主体的前侧表面设置有摄像头二和上位机。设计的智能垃圾桶具有自动拾取垃圾,并对垃圾进行判断,实现垃圾分类收集等功能,该智能垃圾桶还设置了移动系统,可以移动和转向,方便本垃圾桶的布设。智能垃圾桶整体外部侧面结构示意图如图1所示。

图1 整体外部结构图
垃圾桶主体的后侧安装有出料口盖板,出料口盖板通过伺服电机进行带动实现开合,伺服电机固定于垃圾桶主体上,垃圾桶外桶体的下部侧面上设置有与出料口盖板位置相对应的出料口,垃圾桶内桶体的侧面上设置有与四个收容室一一对应的四个排料口,排料口与出料口位置相对应。垃圾桶外桶体的内侧底部安装有用于对垃圾桶内桶体进行称重的压力传感器,压力传感器通过数据线与下位机电性连接。垃圾桶主体行走台由上顶盖、下底座、超声波探测仪、转向电机、转向轮、蓄电池、单片机、驱动电机和移动轮组成,转向轮设置于下底座的底部一侧,转向电机固定设置于下底座的顶部一侧,且转向电机的动力输出轴带动转向轮旋转,移动轮设置于下底座的底部另一侧,驱动电机固定设置于下底座的顶部另一侧,且驱动电机带动移动轮旋转,蓄电池固定设置于下底座的顶部中心位置,上顶盖固定设置于下底座的上方,单片机固定于上顶盖的内侧顶部,超声波探测仪固定于上顶盖的一侧,超声波探测仪通过数据线与单片机电性连接。
2 智能垃圾桶的使用原理
2.1 电控方面,采用STM32F103C8作为主控芯片
STM32F103C8配有ARM Cortex-M3 32位微控制器,48路LQFP封装,它结合了高性能的RISC内核,运行频率可达72MHz,其运算速度是51单片机的几十倍。STM32F103C8工作温度广,抗干扰能力强,性能强悍,可以同时控制多个设备,并且体积微小、成本低廉,目前市面上一块STM32F1售价仅为8-9元。在配合丰富的软硬件开发工具,让该类单片机成为项目中解决方案的理想选择。
2.2 图形分类方面,采用搭载了OPENCV的树莓派arm板。先通过对图像采用一系列的处理,然后在通过预先训练的模型,对居民的垃圾进行预分类
首先通过对图像进行亮度、颜色、仿射变换、噪点、模糊、翻转等方面的增强,突出图像的特征,从而使模型具有更好的泛化能力,弱化模型对图片明暗色彩、角度变化、局部裁剪的依赖,使其更好地适用于真实的垃圾分类场景。
垃圾的智能分类采用深度学习进行模型训练,然后进行智能预测。深度学习是近十年来人工智能领域取得的重要突破。它在语音识别、自然语言处理、计算机视觉、图像与视频分析、多媒体等诸多领域的应用取得了巨大成功。利用卷积神经网络等深度学习解决方案,可以逐渐取代基于算法说明的传统图像处理工作。深度学习凭借其在识别应用中超高的预测准确率,势必将带来包括垃圾分类在内的多个传统行业的深刻变革。
深度学习里面的基本模型大致分为三类:多层感知机模型、深度神经网络模型和递归神经网络模型。其代表分别是DBN(Deep belief network)深度信念网络、CNN(Convolution Neural Networks)卷积神经网络、RNN(Recurrent neural network)递归神经网络。
本文采用CNN(Convolution Neural Networks)卷积神经网络。卷积网络是为识别二维形状而特殊设计的一个多层感知器,也是一个多层的神经网络,这种网络结构对平移、比例缩放、倾斜或者共他形式的变形具有高度不变性。其基本运算单元包括:卷积运算、池化运算、全连接运算和识别运算。
Google公司开发的Inception系列网络模型,除了像之前网络模型一样增加网络的深度外,在保持计算量基本不变的条件下另辟蹊径考虑了网络的宽度,即对输入图像并行地执行多个卷积运算或池化操作,并将所有输出结果拼接为一个非常深的特征图。通过综合考虑各网络模型的优缺点、模型搭建运行成本等因素,本文最终选择使用InceptionV3网络模型作为系统的分类器。InceptionV3网络模型结构如图2所示。

图2 Ince ption V3网络模型结构
它包括了输入层、卷积层、池化层、全连接层以及softmax输出层。InceptionV3网络共有47层,前面的卷积层设计了3×3和1×1,步长均为1的2种不同卷积核,卷积核通过与上一层图像的局部感受野进行卷积运算后加上预先设置的偏置值完成一次卷积操作,其变换过程为图3所示。

图3 卷积变换公式
InceptionV3网络通过设计多个Inception Module模块组增加了网络的宽度。模块组通过使用多个1×N和N×1的卷积核极大地减少了网络的参数,缩小了深度,降低了卷积神经网络的运算量。通过全连接层变换公式,即如图4所示。
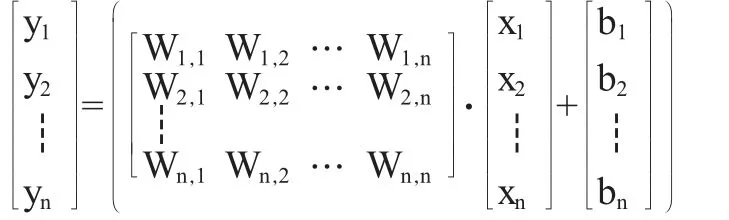
图4 全连接层变换公式
转化为一维向量,最后选用softmax函数作为最终的类器。由此输出概率分布,实现多分类目标。
2.3 语音方面,采用麦克风阵列作为声音识别的主要传感器
基于Raspberry Pi的ReSpeaker 4-Mic阵列是一款适用于AI和语音应用的Raspberry Pi的四通道麦克风扩展板。这意味着可以借助它构建一个集成Amazon Alexa语音服务、Google助手等,功能更强大、更灵活的语音产品。
可以通过调用百度语音识别的api,在其上面训练新的模型,直接调用,即可完成像小爱同学这种语音助手功能。
3 新型智能垃圾桶的优势
本文设计的新型智能垃圾桶具有视觉识别功能,通过摄像头能够对地面进行检测,能够自主发现垃圾。该智能垃圾桶还设置了机械爪,在发现垃圾之后,能够自主拾取垃圾,该智能垃圾桶能够根据摄像头拍摄的影像,对垃圾进行分类,然后将垃圾放入到对应的垃圾桶内,实现垃圾的自动分类,可以满足当前对垃圾分类的要求。此外还设置了语音识别功能,上位机具有语音接收功能,工作人员可以通过语音的方式设定垃圾桶的移动总路径,在设定完成后,垃圾桶根据语音可以自动移动到指定位置,方便垃圾桶的布设。
4 应用市场前景分析
目前中国城市垃圾收集和运输方式尚处于比较落后的阶段,绝大部分的居民生活垃圾采用混合收集,未实行分类收集。有的城市开始实施垃圾分类收集管理制度,但成效不显著,主要是因为我国目前尚缺乏关于垃圾分类收集的强制性法律法规以及经济调整杠杆,居民没有从垃圾分类收集中获得益处,而且城市居民的环保意识不强,推广的难度较大。随着人们生活水平的提高和科学技术的不断创新,垃圾分类将逐渐从人力执行变成机械执行。在未来,垃圾分类的发展方向必将是为了适应不同垃圾的分类要求以及适应各种垃圾的处理方式。研究智能程度高的垃圾桶有利于减少我国更多的人力、物力、财力,有利于减少垃圾的混合收集,对我国的经济发展也具有深远的意义。
5 结论
总的来说,本文设计的智能垃圾桶具有强大的功能,能够实现垃圾的自动识别、自动拾取,能够对垃圾进行分类,同时垃圾桶可以自动移动、避障,按照语音设定进行布设,可以给人们提供极大的便利,具有较好的应用价值。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
好孩子画报(2021年2期)2021-03-15
快乐语文(2020年33期)2021-01-16
作文与考试·小学高年级版(2020年19期)2020-11-16
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年11期)2019-07-04
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30