
新型无人机消防救援系统的设计研究
2021-06-27 03:26卫霞王佳航朱宇刚付家珂
电子设计工程 2021年12期
卫霞,王佳航,朱宇刚,付家珂
(西安明德理工学院信息工程学院,陕西西安 710124)
随着火灾发生率的提高和扑救难度的上升,现有的消防系统,如防火栓灭火系统、防火分区系统、火灾自动报警系统等均存在着一定的局限性、滞后性,逐渐呈现出不足之处[1]。如何准确、及时获知火场情况,快速高效地做出部署成为消防灭火的重中之重。由于无人机灵活性强,不受地形限制,可以快速到达现场,易于远程操作,成本低,可相对准确地监测现场情况[2-3],为消防人员快速做出正确应对提供支撑,在消防灭火救援工作中凸显出较好的应用优势。
文中无人机消防救援系统采用模块化设计,各个模块相互联系又相对独立,具有较高的通用性。首先对无人机机体结构进行优化,提升了无人机的运力;采用大疆Naza-M Lite 搭载NEO-M8N GPS 模块的飞控系统,确保无人机稳定飞行;信息采集传输系统设计精简并可独立运行,具有通用性,可移植搭载到多种无人机平台直接使用;救援系统可搭载不同的救援设备,提高了无人机的适用性及灵活性。
1 系统总体设计方案
新型无人机消防救援系统总体框图如图1 所示,由机体结构系统、无人机飞控系统、信息采集传输系统、救援系统4 个模块组成。
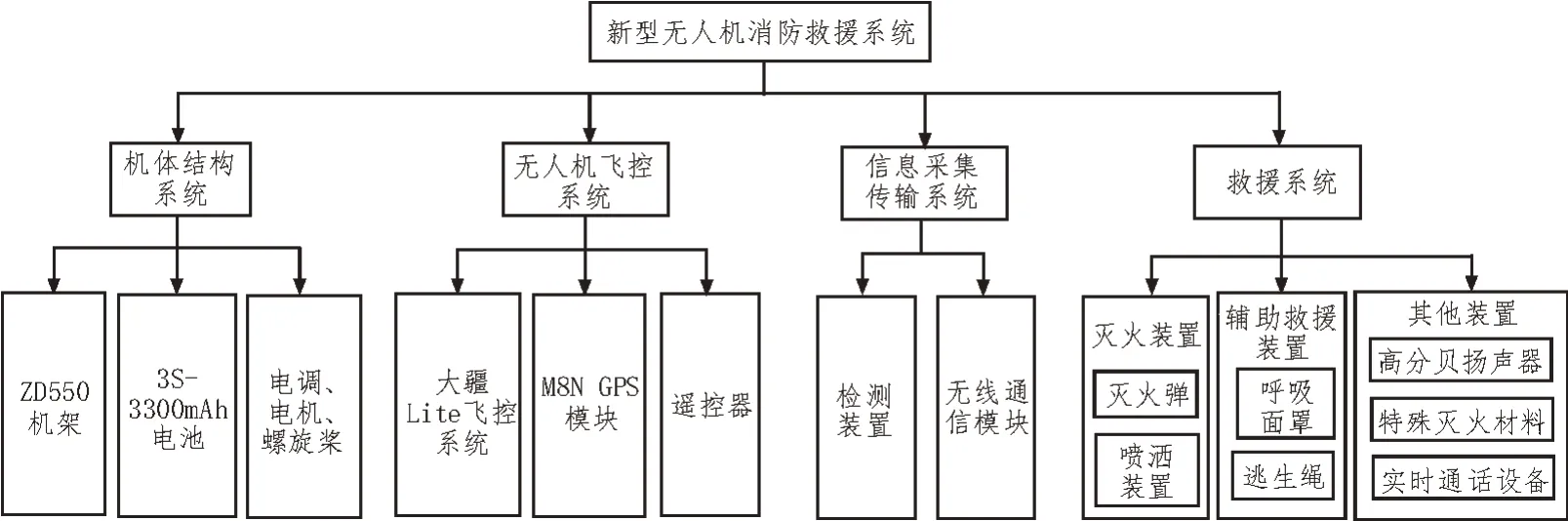
图1 系统总体框图
其中机体结构系统、无人机飞控系统和救援系统主要是对现有主流产品,结合消防特殊的使用场景,通过筛选组合出适合该方案的产品,而信息采集传输系统则作为该系统最重要的部分,通过联调设计实现。下文将详细介绍各个系统的设计实现。
1.1 无人机飞控系统
飞控系统作为无人机的“大脑”,指挥无人机完成起飞、飞行、转向等系列动作,其稳定性至关重要[4]。通过多种方案筛选对比,设计的飞控系统采用大疆多旋翼飞行控制器(Naza-M Lite)和NEO-M8N GPS模块组成。该设计既集成了大疆飞行控制系统创新的All-in-One 设计理念,即将减震设计、控制器、陀螺仪、加速度计和气压计等集成在一个控制模块中,从而实现高度和姿态锁定等飞行控制功能[5],另外,由于NEO-M8N GPS 模块采用了UBX 协议,可以使无人机更好地定点悬停,既大大降低了操控难度,又可以在执行救援任务时及时发送定位信息。经调测优化后,系统实现了手动、姿态、GPS 等模式的自动切换,确保无人机稳定飞行,为实现救援系统做好铺垫[6]。
飞控系统实时调整到稳定信道,从而提高抗干扰能力,流程如图2 所示。大疆Naza-M Lite 系统对无刷电机采用(Proportion Integral Differential)PID 算法控制,根据NEO-M8N GPS 模块生成的定位信息分析计算无人机当时的飞行姿态,再由姿态解算单元通过PID 算法生成控制量,飞控系统将控制量发送至遥控器,操作人员根据当前飞行状态,操作遥控器发送遥控指令到接收器上,从而实现对无人机的角度控制[7-8]。遥控器与飞控系统可支持2.4/5.8 GHz双频通信,能在飞行中智能识别通讯质量,并实时调整到稳定信道,从而提高抗干扰能力。

图2 飞控系统流程示意图
1.2 机体结构系统模块
系统支持不同的多旋翼无人机。多旋翼无人机由3 个及以上螺旋桨组成,其中四旋翼最为典型和常见。顾名思义,四旋翼有4 个轴,安装4 个螺旋桨,由螺旋桨的高速旋转产生向上的拉力实现垂直起降[9]。其机动性通过改变旋翼的扭力和转速实现,具有垂直升降、低空飞行、空中悬停、原地打转等特点,所以符合消防救援的特定需求。
机体结构采用共轴双旋翼无人机,即在一个轴上装两个转动方向相反的螺旋桨,同轴上的两个电机相反连接,且调整下方的升力略小于上方,实现了在不影响无人机灵活性的前提下,将升力提升一倍,实现了搭载更多救援设备的目标[10]。
采用碳纤维材料的ZD550 机架,该材料质地轻盈且强度高,同时具有可折叠、成本低等特点。搭配14 寸螺旋桨、40 A 电调及400 kV 无刷电机,最大可提供5 kg 载重,满足了不同救援环境、救援需求下对救援设备的不同需求[11]。综合考虑无人机对温度及火场环境的特殊需求,相比于燃料驱动,采用3S-3300 mAh 航模电池作为无人机的动力来源,既可以为无人机提供更好的续航及载重能力,又凸显了环保特性[12]。
1.3 信息采集传输系统模块
该系统由控制模块、检测装置、通信模块以及供电单元组成,首先选定了基于ARM Cortex-M 内核的STM32F103RCT6 最小系统为主控硬件电路,STM32 F103RCT6[9]的最小系统中由AMS1117-3.3 的稳压芯片提供3.3 V 电源,8 M 的无源晶振与电容构成外界晶振,为CPU 提供外接时钟,由电阻和电容组成复位电路,由晶振、AMS1117-3.3 和复位电路即可构成ARM 芯片的最小系统。设计时,在电源部分串联一个0.1 μF 瓷片电容作为滤波,使电压更加稳定。系统设计如图3 所示。
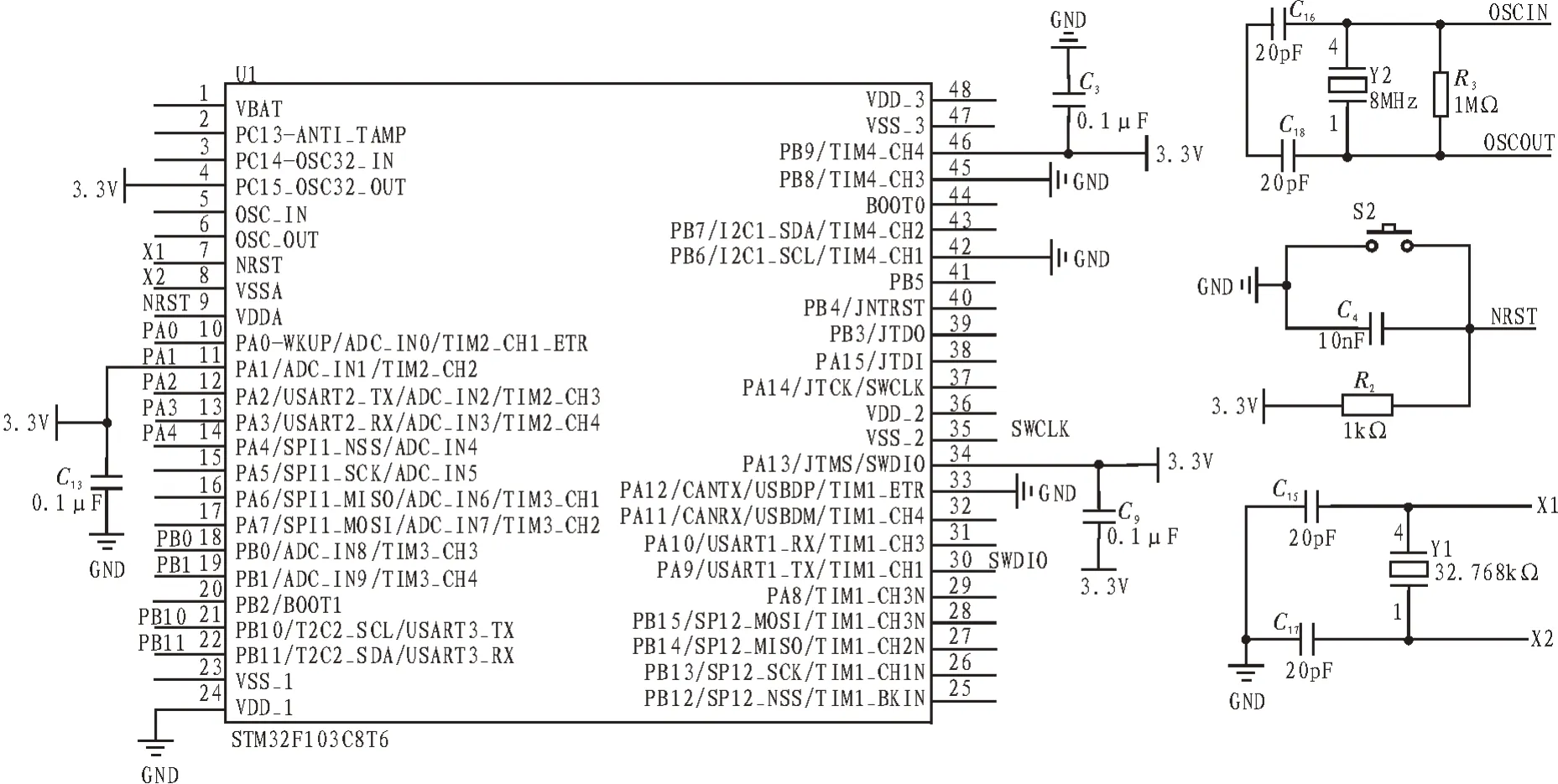
图3 STM32F103RCT6最小系统设计
网络接入芯片的选择成为系统设计的关键和难点。经选型对比,最终采用价格低、功耗低、体积小且性能稳定的ESP8266 无线通信模块作为网络接入芯片,实现了全双工通信方式的组网。检测装置主要由气体检测模块、温压传感器、GPS 模块等构成,其中气体检测模块主要检测一氧化碳、二氧化硫等火灾中常见的有毒气体,温压传感器提供火场的温度、压强等实时数据,帮助消防人员制定相对应的计划,提高灭火的精准性[13]。信息采集传输系统硬件电路如图4 所示。
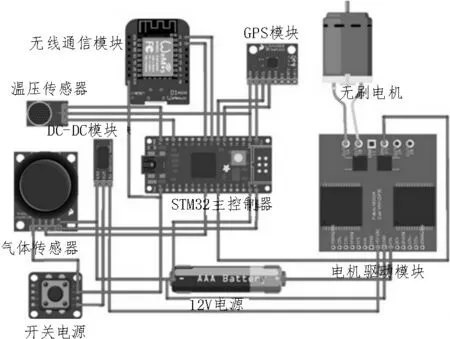
图4 信息采集传输硬件电路图
检测装置采集的现场环境参数,通过集成电路总线(Inter-Integrated Circuit,IIC)传输至主控制器,经过主控制器的算法进行数据处理后,借助无线通信网络将处理后的数据实时发送至终端设备,终端设备可根据发送的数据制定救援方案,操控救援设备展开救援。信息采集传输系统工作流程如图5所示。
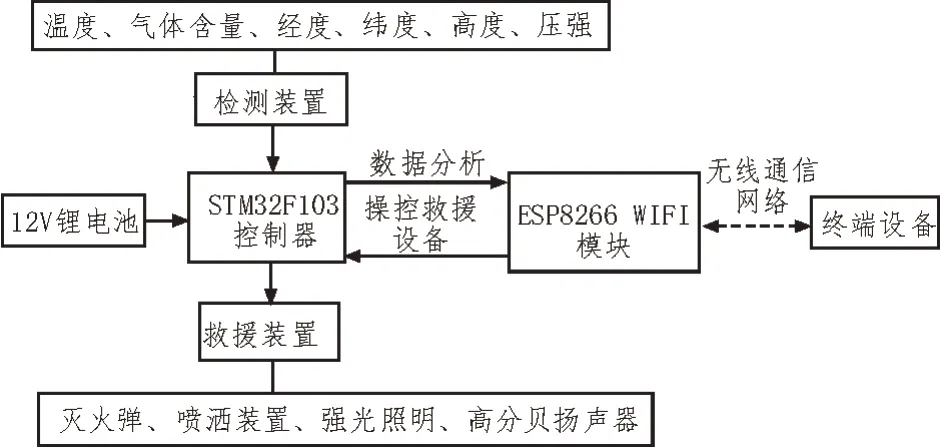
图5 信息采集传输系统工作流程图
该系统采用无线通信网络作为载体实时传输采集的数据,可在最短的时间将现场情况呈现出来,辅助消防人员快速准确地做出反应。由于无线通信网络受环境干扰较小,传输距离可高达5 km 以上,可在多种复杂情况下稳定运行。采用12 V 锂电池经过电机驱动模块降压后给系统供电[14],由于主控模块及检测装置都为低功耗产品,经测试,系统稳定供电时间在7 小时以上,可长期监测现场情况。此外,该系统设计精简并可独立运行,可直接移植搭载到多种无人机平台使用。信息采集传输系统实物如图6所示。

图6 信息采集传输系统实物图
1.4 救援系统模块
新型无人机消防救援系统需要搭载不同的设备,以应对各种复杂的火灾事故,所以救援系统模块采用可拆卸、可替代的设计方式,以提高无人机的适用范围及灵活性[15]。
无人机最大载重为5 kg,可针对不同的应用场景搭载相应的工具,通过控制系统实现对应的操作。如对于城市火灾,无人机以3.8 m/s 的速度飞行,可以更快到达现场,在第一时间展开营救;对于森林发生火灾,可以采用无人机直接投放大型的灭火弹进行灭火;对于其他类型的诸如化学、金属、气体等火灾,可以搭载对应的灭火材料进行消防救援[16-17]。此外无人机可以搭载一些辅助救援装置,例如呼吸面具、高分贝扬声器等设备,为被困人员送去救援物资、安抚被困人员情绪等。
2 试用及结果分析
各模块开发优化完成后,首先在室内环境对各功能模块进行了干扰测试,并对出现的问题进行了优化分析,直至各功能模块再未出现故障。在模拟环境的抗风等级测试中,表明无人机的抗风等级为6级;高温环境测试结果表明,无人机在50 ℃左右时仍能正常运行。当前的试用数据表明,文中设计的无人机消防救援系统在火场复杂情况下,具备了数据实时、准确传输,能够及时响应遥控器发送的控制指令,满足多种消防救援需求下的应用。
在正常的环境参数下,无人机的功能表现如表1所示。
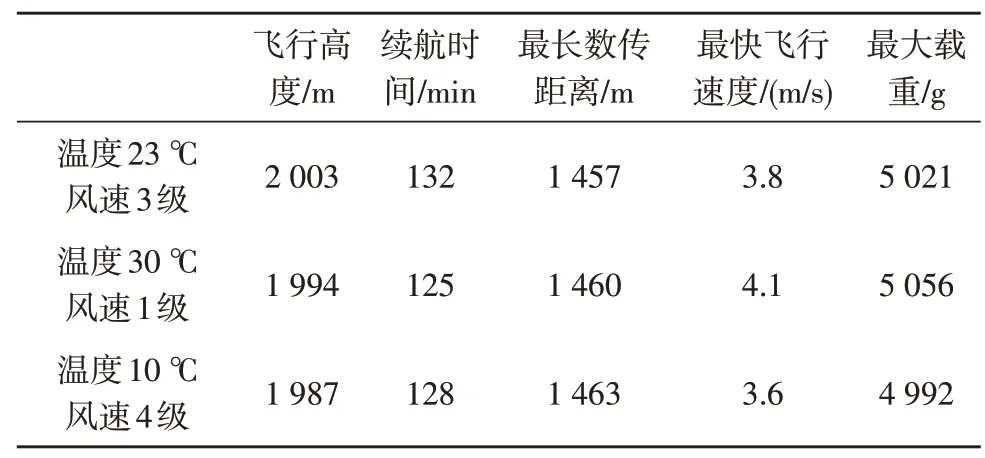
表1 测试数据
3 结束语
文中基于模块化设计出一套新型无人机消防救援系统,该系统通过将无线通信技术和无人机技术结合起来,能够快速到达火灾现场,将火灾现场采集到的数据实时传输至终端设备,消防人员可以根据现场状况做出及时有效的方案,降低人员伤亡,减少财产损失。为提高消防救援灭火能力提供了新的手段和方法。
在结合现有设计的基础上,可以进一步优化信息采集传输系统,以在复杂的应用场景下提供更高的数据传输性能;另一方面,可对无人机的外部材料进行优化,在不影响飞行控制、载重的前提下,提供更高的防火性能,以满足消防应急的实际需要。
猜你喜欢
哈哈画报(2022年5期)2022-07-11
北京航空航天大学学报(2021年9期)2021-11-02
家庭影院技术(2021年3期)2021-05-21
军民两用技术与产品(2021年9期)2021-03-09
铁道通信信号(2020年5期)2020-09-21
学生天地(2020年1期)2020-08-25
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
铁道通信信号(2016年10期)2016-06-01
数学大王·低年级(2015年6期)2015-07-09
