
一种基于子空间方法的近场目标定位算法
2021-06-27 14:10:56阮新志吴云韬黄龙庭
武汉工程大学学报 2021年3期
阮新志,吴云韬*,黄龙庭
1.智能机器人湖北重点实验室(武汉工程大学),湖北 武汉430205;2.武汉工程大学计算机科学与工程学院,湖北 武汉430205;3.武汉理工大学信息工程学院,湖北 武汉430070
空间目标定位是阵列信号处理中一项十分重要的研究方向,根据信号源距离接收阵列的远近可以分为远场信号源与近场信号源,相比于远场信号源,近场信号源处理起来更加复杂一些,此时信号源处于Fresnel区域,相对于阵列孔径需用球面波前精确描述,波前形状随阵列位置具有非线性变化特性,信号源的位置必须由距离(range)以及到达方向(direction of arrival,DOA)共同确定,所以近场目标定位可以归结为信号源距离以及到达方向联合估计的问题[1]。近场目标定位在电子监控,地震探测,声源定位等领域得到广泛应用[2-4]。
近年来,许多针对近场目标定位的算法被提出,文献[5]提出了最大似然估计法,虽然其估计性能好,但是需要进行谱峰搜索,在多个信号源情况下计算量很大;文献[6]提出了二维多重信号分类(two-dimensional multiple signal classification,2DMUSIC)算法,该方法对于近场信号源具有参数估计精度高的特点,但是由于需要二维谱峰搜索,所以该方法计算量较大。随着研究的深入,一些新的算法被提出,如Rooot-MUSIC算法[7],改进的路径搜索算法[8],加权线性预测法[9],基于广义旋转不变子空间技术(estimation of signal parameters via rotational invariance technique,ESPRIT)技术的近场源目标定位算法[10],这些算法都是在已有的算法基础上进行改进,在一定程度上降低了计算量。
在现有提出的不需要谱峰搜索算法,文献[11]提出的基于高阶累积量的总体最小二乘ESPRITLike算法,文献[12]提出了一种基于四阶累积量的子空间的近场源角度参数估计和距离参数估计算法,这两种算法由于存在累积量的计算,使得计算量仍然很大。针对上述问题,本文所提出的结合PUMA技术[13-14]以及一维MUSIC方法[15]的算法,不需要高阶累积量计算以及多维搜索,降低了计算量,并且在距离参数以及角度参数估计性能方面也有所提高。
1 信号模型
图1中的阵列是一个均匀线阵,该均匀线阵由M个阵元组成,阵元间距d≤ν4,ν表示信号波长,假设有P个相互独立的近场窄带信号入射到此阵列上,θp与r p分别是第p个信号sp(t)的角度与距离参数,以阵列的中心O为参考点,则第m个阵元的接收信号可以表示为:

式中,m=1,2,…,M,nm(t)为第m个阵元上的加性高斯白噪声,τpm是第p个信号到参考点O与第m个阵元的相位差可以表示为:
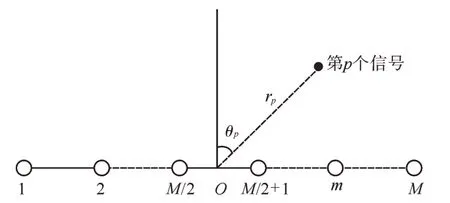
图1 近场源信号接收模型Fig.1 Reception model of near-field source signal

式中k=[m-()M-1 2],根据Fresnel近似[9]可以将式(2)表示为:

式中μp和φp与第p个信号的角度参数与距离参数有关,可以表示为:

在一定时间内对所有阵元的一次采样称为快拍,快拍数L有限的情况下,阵列协方差矩阵可以表为:

式中X(t)H表示对矩阵进行共轭转置变换。
2 近场目标角度与距离估计
2.1 近场目标角度估计
对式(9)中的协方差矩阵进行特征值分解有:

式(10)中,U S=[u1…u P],U N=[u P+1…u M],分别表示信号子空间与噪声子空间,ΛS是前P个较大特征值所组成的对角阵,其表示为ΛS=diag(λ1…λP),ΛN是剩下的M-P个特征值所组成的对角阵,其表示为ΛN=diag(λP+1…λM)。根据线性预测(linear prediction,LP)理论,对于信号子空间U S中每一个元素u p(p=1,2,…,P)都满足以下线性关系[14]:


2.2 近场目标距离估计
将式(22)估计出来的角度参数θˆp代入到式(8)的导向矢量a()θp,r p中,这样问题被简化为一维参数估计问题,由于噪声子空间在式(10)特征值分解中已经得到,所以可以通过MUSIC方法直接构造第p个信号关于距离的空间谱函数:

为了避免参数配对问题,在每个估计方位形成MUSIC频谱,对于P个信号源,一共形成了P个频谱,所以需要进行P次一维搜索来实现距离估计。因此在本文算法中,总共需要P次一维搜索。
3 仿真实验
在仿真实验中,均匀线阵由10个阵元组成,阵元间距d=ν4,噪声为加性高斯白噪声,有2个窄带且相互独立的信号源入射到均匀线阵中,信号源到阵列参考点的距离即Fresnel区域应该满足以下条件:

实验一:实验中快拍数L固定为2 000,信噪比G从-5 dB增加到10 dB间隔1 dB,每个信噪比做500次Monte-Carlo实验。实验结果如图2所示。
从图2可以看出,随着信噪比的变化,本文提出的算法可以比较准确地估计出近场信号源的距离与角度参数,且随着信噪比的增加,均方根误差曲线呈现出降低趋势,其性能优于method2[11]、method3[12]方法,接近于method1[6]方法。
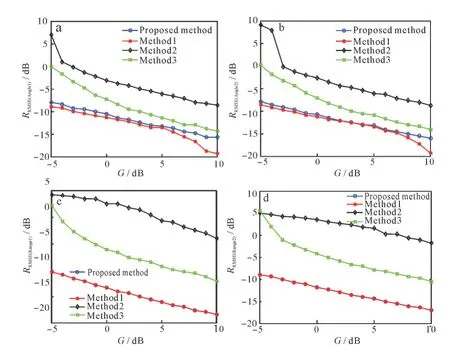
图2 信噪比变化对算法性能影响:(a)信号源1角度,(b)信号源2角度,(c)信号源1距离,(d)信号源2距离Fig.2 Influence of SNR on algorithm performance:(a)angle of signal source 1,(b)angle of signal source 2,(c)range of signal source 1,(d)range of signal source 2
实验二:实验中G固定为5 dB,快拍数L从500变化到2 000间隔100,每个快拍数做500次Monte-Carlo实验,实验结果如图3所示。
从图3(a)~图3(d)可以看出,随着快拍数的变化,本文提出的算法可以比较准确地估计出近场信号源的距离与角度参数,且随着快拍数的增加,均方根误差曲线呈降低趋势,其性能优于method2[11]、method3[12]方法,接近于method1[6]方法。
从图3(e)可以看出本文方法在不同快拍数下单次运行时间明显快于文献[6]、文献[11]以及文献[12]中提到的方法,从实验一与实验二可以看出,本文提出的算法在距离估计上信号源1的性能略好于信号源2的性能,说明距离阵列参考点越近,距离参数估计性能越好,在角度参数估计上,信号源1与信号源2的估计性能相似,文献[17]中理论分析得到的结论与此结果一致。同时本文算法具有运行时间短的特点,这也是本文算法的优势所在。

图3 快拍数变化对算法性能影响:(a)信号源1角度,(b)信号源2角度,(c)信号源1距离,(d)信号源2距离,(e)运行时间Fig.3 Influence of snapshot on algorithm performance:(a)angle of signal source 1,(b)angle of signal source 2,(c)rangeof signal source 1,(d)range of signal source 2,(e)computation time
4 结 论
本文提出的一种结合PUMA技术与一维MUSIC方法的近场目标定位算法。首先需要将数据协方差矩阵进行特征值分解,得到信号子空间与噪声子空间,由于信号子空间中元素具有线性相位关系,可以利用此关系构建多项式,采用迭代方式求出线性系数,然后求出多项式的根,利用多项式的根估计出近场目标角度参数,接着利用估计出的角度参数采用一维MUSIC方法构建距离空间谱估计出近场目标距离参数。本文算法与现有算法相比,不需要进行高阶累积量计算,并且只需要一维搜索。从计算机仿真实验可以看出本文算法不仅计算量小,而且参数估计精度高。
猜你喜欢
作文小学高年级(2022年3期)2022-04-20 08:17:04
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
福建中学数学(2018年1期)2018-11-29 02:52:14
家庭影院技术(2017年9期)2017-09-26 03:41:22
37°女人(2017年8期)2017-08-12 11:20:48
滇池(2017年7期)2017-07-18 19:32:42
统计与决策(2017年2期)2017-03-20 15:25:22
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
电测与仪表(2016年8期)2016-04-15 00:30:16
