基于多目标模型的海上搜救路线规划模型
2021-06-25 06:44:32王蕾蕾罗建雷汪露露李春雷
科学技术创新 2021年15期
王蕾蕾 罗建雷 汪露露 李春雷*
(1、兰州理工大学 石油化工学院,甘肃 兰州730050 2、兰州理工大学 计算机与通信学院,甘肃 兰州730050 3、兰州理工大学 理学院,甘肃 兰州730050)
尽管近年来科学技术在不断的快速发展,但是航空事故仍时有发生,而飞机失事是航空事故中最严重的一种。因为飞机发生故障时迫降在陆地上更为容易,所以大多数的飞机失事事件都发生在海里。我们经常用卫星来定位失事飞机,但是海洋情况错综复杂,它并不能像在陆地上一样有效的解决问题。因此得到的粗略定位将会导致更加广泛的搜索范围,而我们的搜索设施有限,搜救时间紧迫,搜索行动变成了一个巨大的挑战,为了营救更多的生命,需要建立相应的数学模型来解决这个问题。
在本文中,首先假设无法获得坠毁飞机信号,并建立失事飞机从故障到坠海的物理模型。利用空气动力学模型,将整个运动过程抽象为平抛运动。飞机下落的速度和加速度是不断变化的,导致竖直方向与之相反的空气阻力不断增大,飞机的下坠速度减小,下落时间增长。水平方向只受相反的空气阻力影响,飞机水平速度减小。但由于下降时间的增加,飞机的位移也会相应增加。
1 海域面积量化与价值因子分析
1.1 海面面矩阵量化
本文将需要搜寻的开阔水域进行等距划分,并抽象量化成一个矩阵[1-2]。对影响搜索范围的水文因素、飞机失事前的飞行航向和人员存活率这三个因素分别建立相应的数学模型,计算搜救价值密度分布。根据概率矩阵,后续搜救行动可以合理分配搜救力量,找到最佳的搜救方法并建立扫海模型[3]。
如果通过黑匣子可以听到脉冲信号, 便及时记录并确认信号而后对搜救力量合理分配及时、准确、全面、涵盖所有方面的目标海域。如果黑匣子搜索仪无法检测到脉冲信号,则应考虑风流、洋流、水文等因素的影响,通过建立相应的数学模型,计算搜索范围和搜索值密度分布。确定搜救的范围后,整合搜救力量,搭配出最优搜索方案, 再通过建立数学模型,对搜救路线进行进一步确定,从而形成适合于开展海上搜寻行动的任务分配算法[4]。
1.2 空气未溶解
飞机在空中没有解体之前,可利用剩余的燃料按照出故障之前的飞行状态飞行一段距离,设置这个距离rG,所以坠毁半径:

公式中所使用的参数由飞机制造商提供。
1.3 空中解体
飞机在空中解体,引擎失灵,飞机坠毁过程类似于平抛运动。在水平方向上只受空气阻力的作用,在垂直方向上则受自身重力和空气阻力[5]。把飞机的加速度分解为水平加速度和垂直加速度。由于飞机失去动力,其运动方向、速度和空气阻力都是动态变化的。那么飞行器在落水前的水平速度可以表示为函数VF(t),垂直初速度为0。
飞机从故障出现到坠毁的高度可以通过传感器和雷达测量出来。对竖直方向的加速度表达式求关于坠毁总时间tT的二重积分可得到关于高度h 的表达式为

由(2)(3)(4)式可具体解得水平方向的速度VF(t)
由(5)式可具体解得坠毁总时间tT:
在这种情况下,可以得到坠毁半径R 为飞机在水平方向上的位移rT,其表达式为:

2 水文漂移对搜救价值的影响模型
取矩阵中任意一点,假设到缺失点的距离为X。考虑到飞机在搜索时,失事已经漂移了一段时间t,根据海事部门或气象部门得到失踪时段的洋流速度VW,可以得到漂移距离:
水文漂移模型拟合曲线为:
图1 拟合曲线
如果取矩阵中的任意点(α,β),则如下所示。根据离散函数的表达式,可以得到基于水文漂移的搜救值α(α,β)。
3 建立生命生存对搜救价值的影响模型
矩阵中坐标为(α,β),搜索和救援值α(α,β)的表达式:


图2 偏差拟合曲线

偏差因子拟合曲线:
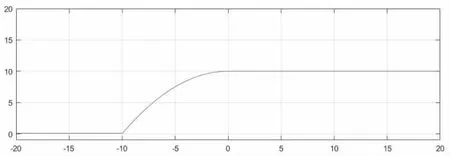
图3 公式拟合图
存活率的表达式为:
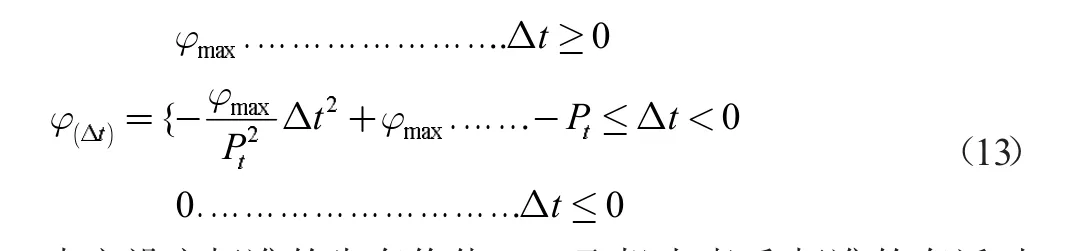
本文设定标准的生存价值φmax,飞机失事后,标准的存活时间td的船员, 和奇迹存活时间Pt波动高于标准的生存时间的定义是△t 标准之间的生存时间和当前时间:

4 目标海域搜救结果分析
对于目标海域,不同的搜索设备对搜索难度的影响是不同的。由于天气的不确定性,未来的天气预报有一定的概率。因此本文分别对空域和海域的冲突风险值进行了评估。
空域冲突风险评估计算如下:

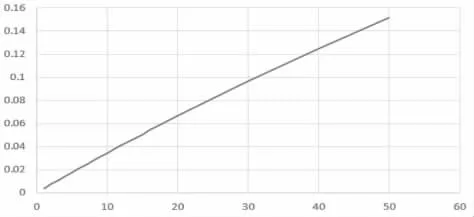
图4 搜救路线与风险概率评估关系
5 结论
本文通过合理假设利用空气动力学模型对飞机故障至坠海过程建立模型。考虑了多种影响因素对事故现场的影响,成功地计算了事故发生的概率和搜索值。在模型中,考虑了水文漂移的时间参数,建立了关于时间变化的动态矩阵。得出随着搜救半径与搜救路线的增加,风险概率逐渐升高的结论。
猜你喜欢
黄河之声(2021年8期)2021-07-23 03:34:32
中国石油石化(2021年10期)2021-07-16 07:31:28
当代音乐(2020年10期)2020-10-26 18:34:52
数学物理学报(2020年2期)2020-06-02 11:29:10
学生天地(2020年19期)2020-06-01 02:11:36
安顺学院学报(2020年1期)2020-04-05 10:57:20
现代计算机(2019年6期)2019-04-08 00:46:50
小天使·三年级语数英综合(2018年6期)2018-06-13 07:53:42
创新作文(1-2年级)(2016年12期)2016-12-26 12:48:40
中学生数理化·八年级物理人教版(2014年1期)2015-01-09 09:07:52