基于SR-NDVI和中值滤波的连云港海域紫菜筏架自动提取研究
2021-06-24 06:29许海蓬张彦彦
海洋技术学报 2021年2期
许海蓬,张彦彦,郑 剑
(1. 连云港市海域使用保护动态管理中心,江苏 连云港 222001;2. 连云港市不动产交易登记中心,江苏 连云港 222001)
连云港市地处我国海岸中部,海岸线长约211 km,岸线类型丰富,沿岸入海河流20余条。丰富的营养盐输入加上海州湾独特的地理条件和市场需求使得紫菜养殖业快速发展,特别是近几年,紫菜养殖面积持续增长。然而,随着养殖面积扩大,海上实地调查和执法受天气、环境和仪器设备等因素影响,很难快速准确地从宏观上掌握养殖情况;同时,对于海域管理而言,还需要准确掌握筏架的面积和个数。这些现实困难使得从影像上自动提取紫菜筏架显得尤为重要。
国内外众多学者开展了养殖筏架的自动提取研究工作,主要分两类:光学和SAR图像提取。其中,光学卫星影像又分为图像处理算法、深度学习和面向对象的特征信息提取,研究对象分为海水养殖和湖泊养殖。面向对象的特征提取通常结合或辅助图像分类方法[1-3];深度学习最近几年开始应用于特征地物信息提取,紫菜筏架也在其中[4-5];基于指数计算、主成分分析和滤波分析等图像处理算法的自动提取和纹理特征分析,结合阈值分割,可达到较好的提取效果[6-12]。相比光学遥感,SAR具备穿云透雾和全天候工作能力,并且可利用海水和紫菜筏架的回波能量差异较大的特点,更加准确地对紫菜筏架进行精确提取[13-15]。同时,还有学者开展湖泊养殖筏架的自动提取研究[8,16-17]。上述研究偏重局部精细化提取,很少有学者考虑海洋环境因素、水深范围等对紫菜筏架自动提取的影响研究。基于此,本文结合连云港海域管理和海洋行政执法的需求,从整个区域的角度出发,应用SR-NDVI和中值滤波两种方法对整个连云港海域的紫菜养殖筏架开展自动提取,并以同时期无人机正射影像信息提取结果作为真值开展精度验证。
1 研究区及数据源
1.1 研究区概况
研究区为连云港市海域,该海域是中国紫菜养殖的重要区域,如图1所示。得天独厚的水文地理条件造就该海域优良的紫菜生长条件,每年11月布置筏架并育苗,之后每半月采收1次,次年4月初完全收割。该海域养殖规范、养殖筏架规则整齐、水深分布较为明显,适合开展紫菜养殖筏架的自动提取实验。

图1 研究区地理位置
1.2 数据源及数据预处理
1.2.1 Landsat-8卫星影像 本文应用美国陆地卫星Landsat-8,相比之前的陆地系列卫星影像,该卫星在技术方面有较大的突破,卫星影像设置11个光学波段,如表1所示。新增的质量评估波段(QA)直观反映影像受传感器和云影响的程度,同时对第五波段进行了一定程度的调整,有效排除了825 nm处水汽吸收影响[18]。本文中影像获取日期为2018年1月13日,研究区紫菜养殖筏架清晰可见,影像质量高,无云层遮挡,如图2所示。

表1 Landsat-8 OLI卫星影像技术参数

图2 研究区Landsat-8卫星影像(R4G3B2组合)
Landsat-8图像可见光波段辐射定标采用ENVI5.3自动处理,软件自动读取定标参数,结果选择表观反射率,原理如下:

式中:Lλ为表观反射率;ML为波段增益;AL为波段偏置。
1.2.2 无人机影像 为验证基于卫星影像的筏架自动提取精度,本文以当天获取的无人机正射影像(图3)提取紫菜养殖筏架信息为真值,开展精度分析,结合航线设计、飞行高度和相机参数,拼接生成的无人机正射影像空间分辨率为0.1 m,航线设计中的地面采样距离(Ground Sampling Distance,GSD)为0.1 m。

图3 研究区无人机正射影像(部分)
考虑无人机正射影像(空间分辨率0.1 m)与卫星遥感影像(空间分辨率30 m)尺度上的差别,以及风、潮汐、潮流造成的筏架变形和环境因素等影响,在基于无人机影像信息提取时采用“四至点”连线作为边界进行提取,如图4所示,目的是最大程度地去除边界处混合像元和环境因素对精度分析的影响。

图4 基于无人机影像进行筏架信息提取示例
2 紫菜养殖自动提取方法
2.1 基于SR-NDVI的自动提取
1973年,Landsat-1卫星成功发射,Rouse等[19]就提出归一化植被指数算法(Normalized Difference Vegetation Index,NDVI)。2008年,Hu C M[20]首次将其应用在浒苔监测分析中。紫菜筏架与浒苔在海水中的状态、深度等情况较为相似,紫菜筏架通常置于水面以下0~0.5 m处,本文分别采集浅水区和深水区“水体”、“养殖筏架”和“养殖筏架边缘混合像元”3种地物的波谱曲线发现,在红光和近红外波段存在明显差别,如图5所示,因此开展基于NDVI的紫菜养殖筏架自动提取实验。

图5 地物波谱曲线
通过调查和无人机影像量算得知,连云港市海域单个紫菜筏架长、宽均为80~120 m,相邻筏架间距为60~300 m,考虑到NDVI一定程度上能消除部分大气效应影响,尤其对于水体这一弱信息而言,显得更为重要。本文采用辐射定标后的图像进行NDVI计算,计算公式如下。

式中:LNIR代表近红外波段的表观反射率;LR代表红光波段的表观反射率。
实际阈值分割中发现,整个连云港海域水质环境在空间上有很大的不同,由于河流入海带来的泥沙和悬浮物、港口航道区水深突变造成水质变化、不同深度水体清澈程度各异和导堤两侧水动力情况不同等因素影响自然形成的“边界”,而这些边界也就形成了NDVI阈值分割的区域分界线。不同因素影响的水质环境如图6所示。
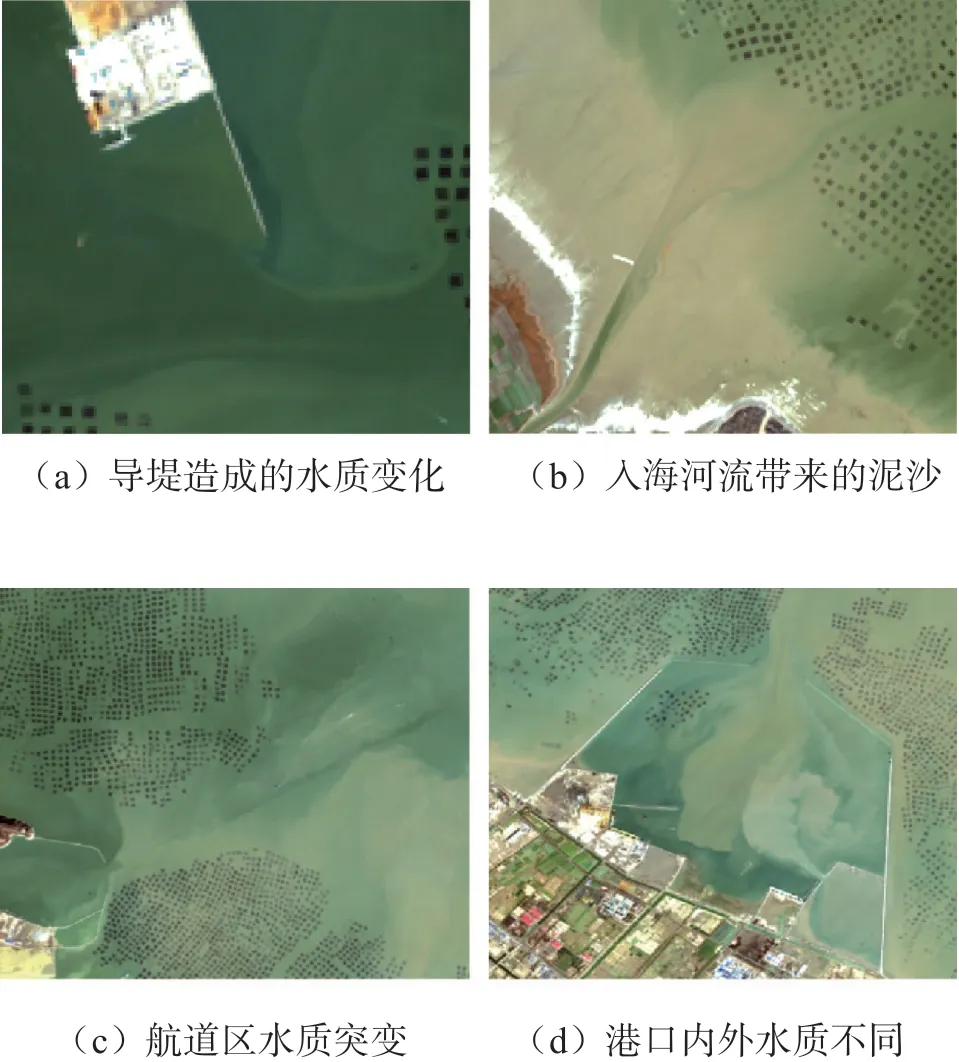
图6 不同因素影响的水质环境
以上诸多情况导致单一阈值无法对整个养殖区进行阈值分割。为此,本文中利用等深线、港口分布范围、航道范围对紫菜养殖范围进行分割,大致确定分区范围,在此基础上结合定性分析并进行多次实验优化分割,形成了10个分区,如图7所示,对应的分区阈值及划分依据如表2所示。

图7 NDVI分区计算范围分布

表2 NDVI分区计算范围对应的阈值
1至3区是连云港港赣榆港区及航道区,其中2、3区的分界线为港口南侧导堤,该导堤使得两侧区域水质明显不同;1、3区分界线为定性分析结果,3区相比1区受沿岸人为因素影响较小,水体相对清澈;4、5、6三个区的分界线为5 m、8 m等深线;7区是连云港港口主航道区及影响区域,与4、5、6区的分界线为多次实验定性判别结果;8区对应陆地的田湾核电站,在海洋功能区划中该区域为“田湾核电利用区”;9区是连云港徐圩港区内部,该区域受“环抱型”围堤影响,水体清澈;10区与8区中间间隙为徐圩港区港口航道区,10区南侧为灌河口,水体较为浑浊。
2.2 基于中值滤波的自动提取
研究表明,将原图像与中值滤波后的图像进行差值运算,可以分辨出对比度不明显的地物[21],有学者利用SPOT影像的绿光波段将这一研究成果应用到海带、牡蛎等筏式养殖自动提取研究中[11]。本文基于上述研究成果,结合“水体”、“养殖筏架”和“养殖筏架边缘混合像元”3种地物波谱曲线在蓝、绿和红光波段均存在差别这一结果,对上述三波段进行中值滤波处理,然后再与原图像进行差值运算,这样可以达到减弱背景水体的表观反射率值,从而凸显紫菜筏架。通过影像量算得知,筏架间的距离位于60~300 m之间(2~10个像元),同时经过多次试验,确定中值滤波模板大小设置为8 × 8方型核时提取效果最佳。
3 结果分析
连云港海域受沿岸入海河流、港口航道区、导堤等因素影响,水深层次性较为明显,从影像定性分析的角度发现,水深大于5 m的区域,水质环境较好,为此以5 m等深线为分界线确定出“深水区”和“浅水区”。通过以上4种实验,即SR-NDVI、中值滤波(蓝、绿和红光波段),结合“深水区”和“浅水区”范围,同时以无人机影像信息提取结果为真值,对四种实验结果进行精度分析,结果如表3所示。

表3自动提取结果比较(底图为无人机正射影像)
实际提取结果中发现存在“筏架相连”的现象,这种现象通常出现在相邻筏架间距离小于50 m(影像上小于2个像元)的区域,如图8中红色虚线框内的筏架,提取结果中表现为距离较近的若干筏架自动提取为1个的现象,如图9所示。

图8筏架相连区域(左:极易出现,右:不易出现)

图9 筏架相连
针对上述现象,将自动识别矢量数据与真值做交集运算(Intersect),得出重叠个数,分析自动提取中此种现象的个数,并结合不同水深环境进行精度评价,参见表4。

表4 紫菜筏架自动提取精度验证表(面积单位:ha)
从自动识别的筏架个数和面积两个角度分析,深水区紫菜筏架自动提取结果较好。浅水区受水质、入海河流等因素影响,自动识别的筏架个数相差较大,其中只有SR-NDVI方法识别筏架个数较好,识别个数误差为21个,识别个数精度为96.30%,基于中值滤波的3种方法识别个数误差较大,分别为55个、50个和88个,识别个数精度仅为90.29%、91.18%和84.48%;从识别面积的角度分析,结果与识别个数类似,SR-NDVI方法识别面积误差为49.72 ha,识别面积精度为91.65%,基于中值滤波的3种方法识别面积误差较大,分别为74.89 ha、114.47 ha和37.93 ha,识别面积精度分别为87.42%、80.77%和93.63%。相比浅水区,深水区受人类活动影响较小,水体清澈,精度相对较高,深水区紫菜养殖筏架为224个,筏架面积为293.19 ha,4种方法识别的紫菜筏架个数较为接近,识别个数误差均优于2个筏架,其中绿光波段的中值滤波方法识别面积为292.80 ha,与真值面积仅相差0.39 ha,识别个数误差1个,识别面积精度和识别个数精度分别为99.87%和99.55%,蓝光波段中值滤波方法次之,识别个数和识别面积精度分别为99.11%和95.11%,红光波段中值滤波方法识别个数和识别面积精度分别为99.55%和88.42%,SR-NDVI方法识别面积误差较大,为51.45 ha,识别面积精度仅为82.45%。
考虑到自动提取结果中存在“筏架相连”的情况,以无人机影像提取的真值作为标准,统计重叠个数,深水区重叠个数与识别个数相差甚微,只有蓝光波段和红光波段的中值滤波方法存在差别,可以得出结论认为,深水区域的自动识别结果基本不存在相连的现象;而在浅水区域,重叠个数与识别个数相差较大,其中红光波段中值滤波方法和SR-NDVI两者差别分别达27个和15个,证明该区域自动识别结果中“筏架相连”的现象较为普遍。
从上述实验结果还可分析得出,浅水区SR-NDVI方法从识别个数和识别面积两个方面,只有红光波段的面积识别精度优于中值滤波方法;而深水区恰恰相反,在识别个数方面,两种方法相差甚微,但从识别面积的角度分析发现,精度仅为82.45%,远远低于中值滤波方法。
4 结论与讨论
4.1 结论
本文利用Landsat-8卫星影像,以连云港市紫菜养殖筏架为研究对象,采用分区域归一化植被指数和中值滤波(分别利用蓝、绿和红光波段)两种方法,开展紫菜筏架自动提取研究,并以同时期无人机影像信息提取真值对自动提取结果开展精度验证,针对不同水深区域,从识别个数、识别面积和识别方法3个角度进行比对分析,同时针对“筏架相连”的现象,利用GIS方法中的交集运算(Intersect)开展精度分析,研究结果表明:(1)浅水区SR-NDVI方法识别面积精度优于中值滤波方法,深水区与之相反。相比浅水区,深水区水质稳定、受人为环境因素影响较小,提取精度相对较高,4种方法识别紫菜筏架个数误差均优于2个筏架,同时绿光波段中值滤波方法识别面积误差仅为0.39 ha,而浅水区提取精度相对较差;(2)深水区域基本不存在“筏架相连”的现象;相反在浅水区域,重叠个数与识别个数相差较大,其中红光波段中值滤波方法两者差别达27个,证明该区域自动识别结果中“筏架相连”的现象较为普遍。本文提取结果为筏架养殖面积、占用海域面积等计算提供了依据,基本满足海洋执法、海域管理需求,同时间接性的为海洋经济统计提供基础数据。
4.2 讨论
本文结合连云港市海域管理和海洋行政执法的需求,研究重点是整个连云港市海域紫菜养殖筏架的自动提取研究,从不同水深、水质环境分析提取方法是否具有普适性,但由于缺乏同步无人机影像开展精度验证,因此未开展多种卫星影像的自动提取研究,下一步将结合其它卫星影像过境时间,采集无人机影像,以验证卫星影像对紫菜养殖筏架自动提取的普适性。
本文自动提取研究中,由于海水受入海河流、水动力环境等因素影响,本文中采用定性的方法对整个连云港市海域进行划分,造成一定的提取误差,在后续的研究工作中,结合海洋水色方面的知识对水体进行处理,尽可能去除这方面的影响,并开展多种指数方法的自动提取实验,分析其普适性。
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
小学生学习指导(低年级)(2021年9期)2021-10-14
孩子(2021年1期)2021-02-02
中学生数理化·七年级数学人教版(2019年10期)2019-11-25
幽默大师(2019年10期)2019-10-17
小学生学习指导(低年级)(2019年9期)2019-09-25
小学生学习指导(低年级)(2018年9期)2018-09-26
电子制作(2018年2期)2018-04-18
婚姻与家庭·婚姻情感版(2018年4期)2018-04-09
制导与引信(2017年3期)2017-11-02