
多传感器数据融合在粉尘监测中的应用
2021-06-24 10:26:14贺靖康卜祥丽
华北科技学院学报 2021年2期
黎 冠,王 标,贺靖康,卜祥丽,王 迪
(1.华北科技学院 电子信息工程学院,北京 东燕郊 065201;2.华北科技学院 安全工程学院,北京 东燕郊 065201;3.华北科技学院 机电工程学院,北京 东燕郊 065201)
0 引言
随着信息化、智能化的发展,传统的粉尘监控系统已不能适应现代化企业的安全生产需要。利用多传感器数据融合技术对生产空间进行监测已经成为现代监控系统的主要研究方向,有许多学者在此领域开展了深入的研究。王岳等[1]利用多传感器融合技术优化了档案室实时监控系统,增大了系统监控范围;方怡等[2,3]通过改进D-S证据理论解决了证据冲突对融合结果的影响,提高了融合结果的准确性;刘树源等[4]为解决超低温加工环境监控的复杂性,利用多传感器数据融合技术提高数据融合的可靠性,满足了系统要求;李菲[5]利用自适应加权平均算法和D-S证据理论实现对温室环境的智能控制;朱聪[6]为解决多传感器数据融合时易受外界干扰的问题,根据数据特征位置与传感器空间之间的关系提出基于时空预处理的D-S 证据方法并通过综合管廊甲烷气体浓度实验验证该算法对噪声有良好的过滤作用;刘放等[7]为提高齿轮故障智能识别率基于时域和频域等特征参数提出了一种改进的D-S证据理论。
基于以上研究基础,本文基于多传感器数据融合理论,提出一种基于均值距离和D-S证据理论的二级数据融合算法,对生产空间粉尘浓度进行二级融合,以提高生产空间环境安全等级评判的准确性。
1 多传感器数据融合技术
1.1 多传感器数据融合
生产空间的智能化监控离不开环境参数传感器实现对不同信源的监测,要想得到更加精确地结果,需要对监测所得数据信息进行优化,这个过程就是多传感器数据融合。多传感器数据融合分为同类传感器数据融合和异类传感器数据融合两种。常用的多传感器数据融合算法有D-S证据理论、BP神经网络、卡尔曼滤波法等[8-10]。
1.2 基于均值距离的一级融合算法
基于均值距离的融合算法是利用数据自身的特性,降低对数据的要求,同时避免了门限值的预设,加大算法的适用性。对于一组采集的传感器数据a1,a2,…,an而言。其数据的均值为:
(1)

(2)
传感器数据ai的自身权重系数ωi为:
(3)
对n个测量数据的融合结果为:
a=ω1a1+ω2a2+…+ωnan
(4)
1.3 D-S证据理论
1967年,Dempster提出D-S证据理论雏形并于1976年由Shafer进一步完善发展。D-S证据理论的提出给数据融合提供新思路,它可以在没有先验信息的前提下有效的处理不确定信息[2]。D-S证据理论描述如下:
若某一辨识框架θ中的元素两两互斥,其所有子集为2θ。若存在映射m:2θ→[0,1]满足条件:

(5)
则m(A)称为事件A在框架θ中的基本概率赋值函数,也叫mass函数。其所对应的信任度函数Bel(A)和似然函数Pl(A)分别为:

(6)

(7)
其中B为A的子集,信任度函数表示事件发生的一定性,似然函数表示时间发生的可能性。它们的取值范围都为[0,1]。信任度函数与似然函数之间的关系如图1所示。

图1 信任度函数与似然函数关系图
传感器的多个数据的融合需要借助D-S证据组合规则,其具体规则如下:
如果有两条属于辨识框架θ中的证据E1、E2,对应的基本概率赋值函数为m1和m2。则对于所有属于框架θ中的A都有以下定义:
(8)
其中,K反映了两条证据E1、E2之间的冲突强度,定义如下:
(9)
当A中无任何元素时:
m(A)=m(Ø)=0
(10)
2 粉尘浓度监测方案
2.1 生产空间粉尘浓度监测系统
在煤矿、面粉厂、水泥厂等相关企业生产过程中,往往伴随有大量的粉尘产生,这些粉尘弥漫在生产空间,严重影响了生产空间的环境质量。除尘效率的高低与粉尘颗粒的大小有直接关系,不同大小颗粒的粉尘使用过不同的除尘方法可以提高除尘效率。为了更好的加大除尘效率粉尘浓度的情况,一般需要具体粉尘颗粒分布和粉尘总浓度等方面进行综合评估。因此采用多传感器数据融合的方法对粉尘浓度进行全方面的监测可以更精确的测量生产空间粉尘浓度情况,进而对生产空间粉尘安全等级做出准确评估。
本文根据生产过程中产生粉尘的总粉尘浓度、PM2.5浓度、PM10浓度进行生产空间粉尘浓度监控系统设计。首先在生产空间内设置多个粉尘浓度传感器对生产空间粉尘浓度数据进行采集。采用以SM300D环境监测模块为核心的粉尘浓度传感器对PM2.5浓度、PM10浓度数据进行采集;采用GCG1000型粉尘浓度传感器采集工作空间粉尘总浓度数据。基于STM32单片机完成粉尘浓度数据的分析与处理。并把数据发送到人机界面,实现数据的可视化。通过局域网连接本地监控系统,实现粉尘浓度的监控及异常报警。其系统结构如图2 所示:

图2 粉尘浓度监测系统结构图
2.2 粉尘浓度数据处理流程
经粉尘传感器采集的粉尘浓度数据需要经过分析处理才能得到准确的判定结果。本文采用多传感器数据两级融合技术对数据进行分析处理。其具体过程如图3所示。
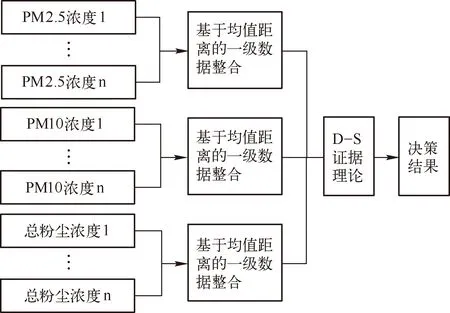
图3 粉尘数据分析处理过程
首先对传感器数据按数据类型进行分类。分为PM2.5、PM10和粉尘总浓度三个数据组。然后对各个数据组进行均值距离的一级数据融合,以减少数据的复杂性,提高数据的精确性。最后通过D-S证据理论对数据进行判定,对生产空间粉尘安全等级做出准确评估。完成粉尘数据分析和处理。
2.3 粉尘浓度安全等级判定规则
生产空间中粉尘浓度、含氧量、通风量等众多因素都会影响粉尘浓度的安全等级。本文从PM2.5、PM10和粉尘总浓度出发,根据各个参数的国家标准对粉尘浓度安全等级做出判定规则。共分为三个等级:比较安全、一般安全和比较危险。具体如表1所示:
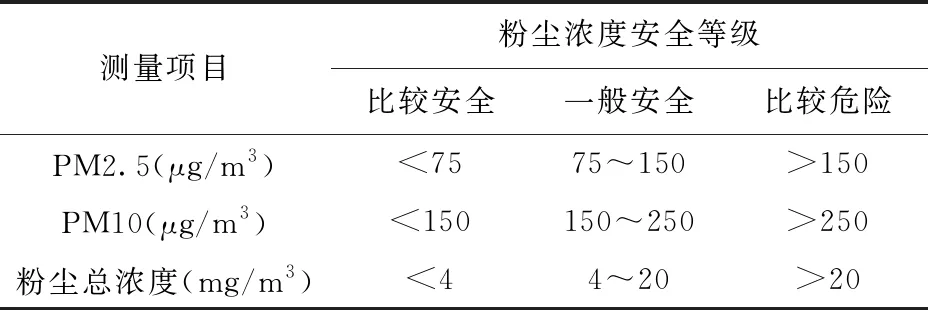
表1 粉尘浓度安全等级判定规则
当传感器所测数据经过一级数据融合后,对融合后的同一数据按照以上安全等级判定规则对各个安全等级进行基本概率赋值,最后利用D-S证据理论完成生产空间粉尘浓度安全等级的判定。
3 实验及结果分析
在生产空间不同位置安装10组粉尘浓度传感器,对粉尘浓度进行监测。系统每采集五个周期对结果进行一次判定,实验结果如表2所示:
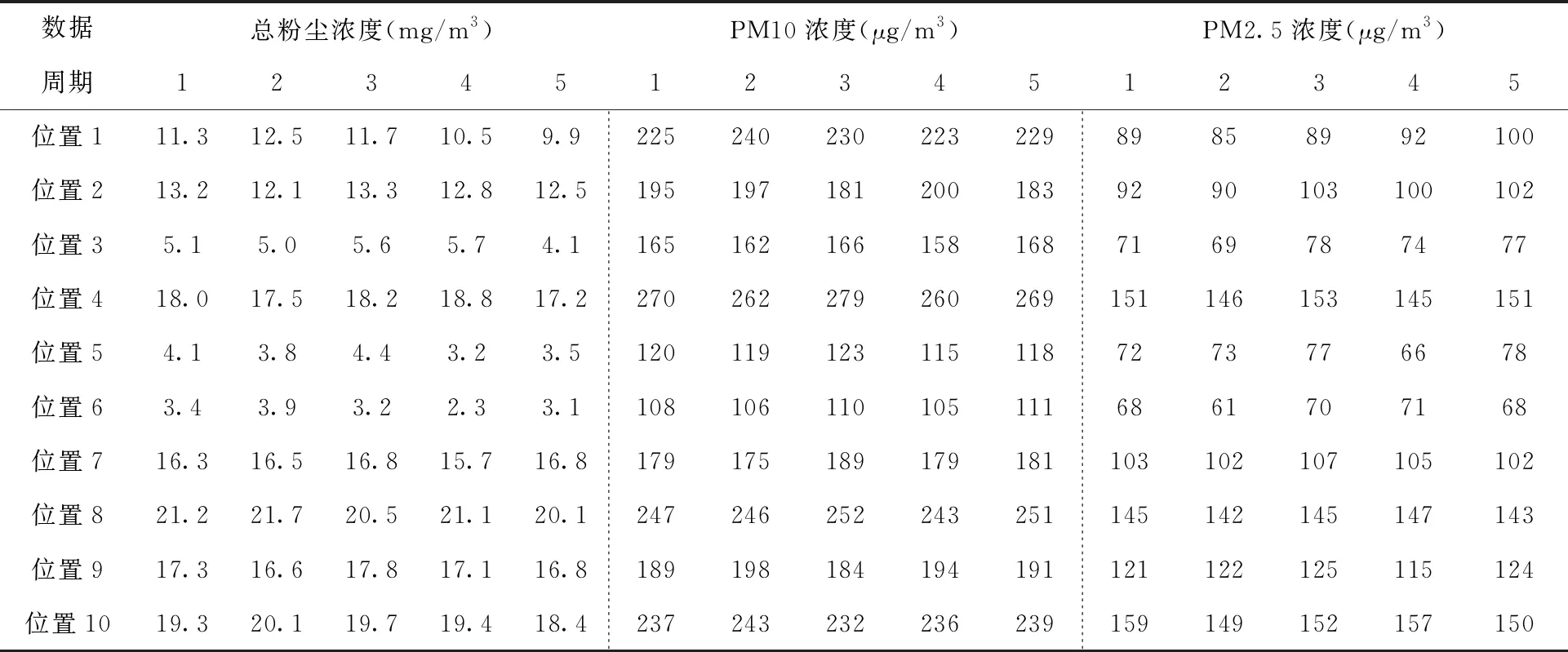
表2 实验数据
需要对以上数据进行基于均值距离的一级数据融合处理和基于D-S证据理论的二级数据融合处理。首先,通过公式(1)~(4)分别对同一位置的传感器同中数据进行均值距离融合处理,其处理结果如表3所示:

表3 一级数据融合结果
然后,根据粉尘浓度安全等级判定规则对一级融合后的同类型数据进行分组,对不同数据的各个安全等级做基本概率函数赋值,其结果如表4所示:

表4 基本概率函数赋值表
最后,利用D-S证据理论做出最后的安全等级评估。先对PM2.5浓度和PM10浓度的安全等级进行融合由公式(9)可计算出KA,B=0.51,根据公式(8)可以得出其融合结果mA,B(比较安全)=0.12,mA,B(一般安全)=0.86,mA,B(比较危险)=0.02。再把所得结果与粉尘总浓度的安全等级进行融合得出生产空间粉尘浓度的安全等级。结果如表5所示:

表5 生产空间粉尘浓度的安全等级结果
由表4和表5可以看出,当通过粉尘浓度的一种参数对生产空间粉尘安全等级进行判决时,处在一般安全的可能性最大,通过三种粉尘参数进行判决后,生产空间安全等级处在一般安全的可能性进一步提高。增加了系统对生产空间粉尘安全等级判决结果的可信度。
4 结论
(1) 生产空间中PM2.5、PM10和粉尘总浓度经过基于均值距离的数据融合后减少了数据的信息量,通过D-S证据理论将不同类型数据进行融合,高度保留了高置信度数据,保证了判定结果的准确性。
(2) 实验通过对三种粉尘参数进行判决后,生产空间安全等级处在一般安全的可能性为0.96,较单一参数判决结果更加准确。
猜你喜欢
防爆电机(2021年6期)2022-01-17 02:40:28
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
作文成功之路·小学版(2019年9期)2019-10-17 01:55:00
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
资源节约与环保(2018年1期)2018-02-08 02:18:05
红土地(2016年3期)2017-01-15 13:45:22
幼儿智力世界(2016年6期)2016-05-14 13:50:51
发明与创新(2016年33期)2016-04-16 16:32:25
