
防御战车行进间发射虚拟样机建模与仿真
2021-06-24 02:19:36尚宇晴付丽强
空天防御 2021年2期
尚宇晴,付丽强,刘 广,涂 静,吴 烁
(上海机电工程研究所,上海 201109)
0 引言
随着高科技的发展,现代战场对武器系统的要求越来越高,武器系统必须具备快速机动性能才能在战场中灵活作战。增强防空导弹武器系统快速机动能力的有效途径主要包括系统智能化、集成化和行进间发射。系统智能化指优化系统配置、增加快速反应能力;集成化指站(雷达,主要用于目标跟踪、照射与导弹制导)、弹(导弹,主要用于毁伤目标)、架(发射装置,主要用于导弹发射控制)三位一体单车装载;行进间发射是指武器系统在动态行驶过程中执行发射任务,实现陆基武器系统的动态作战能力。行进间发射过程涉及多个领域,包括发射动力学、车辆动力学、多系统理论及现代数值计算等多个学科[1]。战车行进间发射过程中,系统内部受力与运动情况较为复杂以及不确定因素较多,若依靠实地试验进行模拟,需要大量人力与财力的投入并且现场会存在一些不可控因素,所以,在试验前进行较准确的仿真模拟显得尤其必要,可为后续实战发射提供理论支持。
针对战车行进间发射动力学的分析,早在1970年,美国陆军装甲兵工程委员会[2-3]就已经对各种装甲车辆行进间的动态性能进行了评估与论证。Samir[4]通过建立有限元模型,对射击载荷和路面激励条件下的坦克炮塔进行了结构动力学分析。近几年,赵波等[5]结合防空导弹的发展趋势,对行进间发射技术的使用意义、装备特点和关键技术进行了总结。史力晨等[6-7]就坦克在不平地面上行驶时车体-火炮系统的振动问题进行了动力学建模与分析,旨在通过建立双侧不平地面以及坦克车体与火炮的相互模型,反映车体的振动对火炮运动的影响。
本文所研究的防御战车融入了“高度集成”的基本设计思路,巧妙地将系统指挥控制与通信、目标搜索与跟踪、火力控制、发射控制、火力拦截等诸多功能进行融合,实现跟踪、制导和发射的单车一体化设计。为了准确评估防御战车行进间火炮和导弹发射的动态性能[8-9],需对车架、转塔、发射架、发射箱等关键部件进行柔性体建模,如此庞大的系统,其柔性体建模和求解具有较大的难度。依据防御战车三维实体模型、悬挂模型、轮胎模型、路面(谱)模型,基于有限元软件MSC.Patran/Nastran 和多体动力学软件MSC.ADAMS 建立了防御战车的多体功能型虚拟样机模型;对防御战车进行了较全面的虚拟仿真试验,获得了防御战车行进间火炮和导弹发射的动力学特性,评估了防御战车的发射稳定性。
1 防御战车组成
防御战车由底盘、油机舱、设备舱、雷达、发射装置等组成,其中雷达包括雷达阵面和基座,发射装置主要包括转塔、炮塔、火炮、发射箱,拓扑结构如图1所示。转塔在工作状态下可实现360°方位回转,发射架安装在转塔上,固定在发射架上的发射箱在接受指令后可在规定时间内完成要求角度的高低调转,并根据发射指令完成导弹发射;炮塔安装在转塔上,与导弹发射架共方位调转,并可根据火控指令控制火炮俯仰角度(0°~85°),独立进行高低指向瞄准与射击。

图1 防御战车拓扑结构Fig.1 Topology diagram of defense combat vehicle
2 动力学虚拟样机建模
2.1 多刚体动力学建模
根据虚拟样机建模规则,其模型的建立是一个由刚到柔、逐步细化的过程,因此在建立单侧提拉发射系统刚柔耦合动力学模型之前需要先建立多刚体动力学模型。
根据防御战车的三维几何模型,通过ADMAS/Exchange 接口程序以Parasold 中性文件格式将三维模型导入到虚拟样机建模平台ADAMS/View 中,在ADAMS/View 中根据其拓扑结构关系定义各种约束和力,从而构建防御战车的多刚体动力学虚拟样机模型。为简化虚拟样机模型,将防御战车中有固定联接关系或相互之间没有运动关系的所有结构定义成单独刚体。防御战车多刚体动力学模型中各个部件的质量、质心、转动惯量根据各部件的三维实体模型和材料属性由ADAMS/View 自动计算获取。
2.2 关键部件柔性体建模
为了建立精度更高的防御战车动力学虚拟样机模型且更加真实地模拟行进间发射的动力学特性,车架、转塔、发射架、发射箱等部件的弹性变形是不容忽视的,因此需要建立车架、转塔、发射架、发射箱等部件的柔性体模型[10-11]。
柔性体模型的建立过程为:在有限元建模软件MSC.Patran中对车架、转塔、发射架、发射箱进行网格离散化以及一系列的相关定义后生成有限元模型输入文件(*.bdf),然后提交给有限元求解器MSC.Nastran 进行模态计算并自动生成模态中性文件(*.mnf),最后在MSC.ADAMS 中使用Flex 接口来读取模态中性文件,从而定义车架、转塔、发射架、发射箱的柔性体模型。
ADAMS 中表示柔性体的方法是Craig-Bampton模态综合法。基于Craig-Bampton 模态综合法,在ADAMS 中构建的车架、转塔、发射架、发射箱的柔性体模型如图2所示。
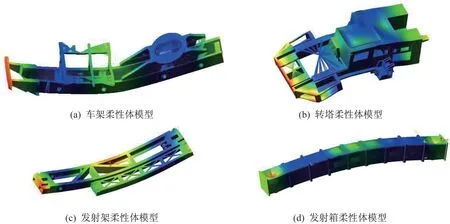
图2 柔性体模型Fig.2 Flexible body model
2.3 力元建模
2.3.1减震弹簧建模
防御战车的悬架减震弹簧是油气弹簧,油气弹簧模型是一种非线性弹簧-阻尼模型,本文采用油气弹簧实测的载荷-位移曲线通过样条曲线来定义减震弹簧的力学特性。防御战车的悬架减震弹簧如图3所示,油气弹簧载荷随变形变化的曲线如图4所示(变形量为负表示压缩,变形量为正表示拉伸)。
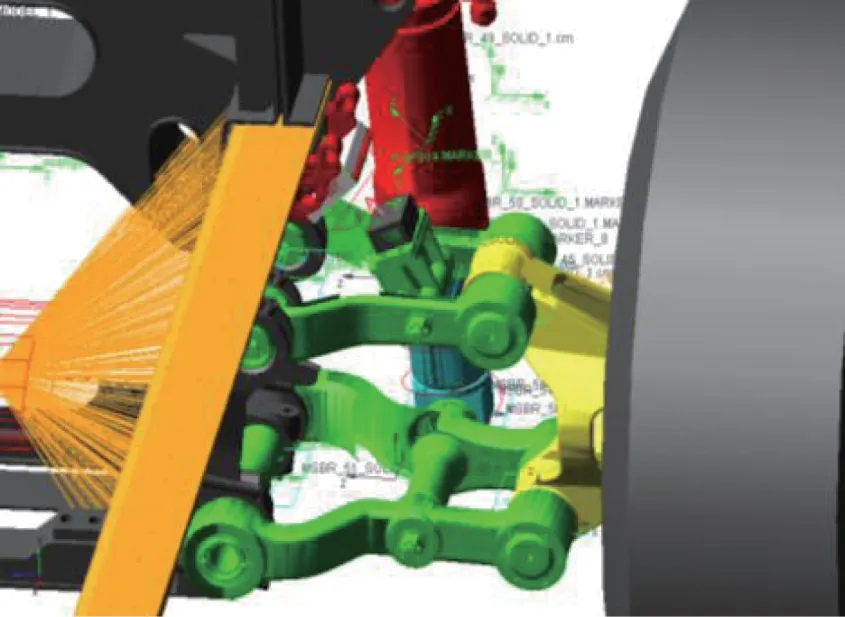
图3 悬架减震弹簧模型Fig.3 Suspension damping spring model
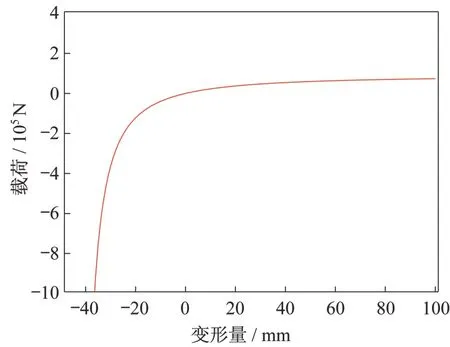
图4 弹簧载荷随变形变化曲线Fig.4 Variation curve of spring load with deformation
2.3.2导弹发动机推力和高炮后座力建模
导弹发动机推力和高炮后座力用方向随其运动姿态一起改变的单向力来模拟,通过Akima 样条插值函数AKISPL来实现,其函数表达式为

式中:time 为仿真分析的当前时间;model1.spline_n 是发动机的试车推力曲线或高炮后座力实测曲线。
Akima样条插值是一种简便、快速、保形性好的分段三次多项式插值方法,Akima 分段三次多项式的含义是在每2 个数据点之间建立1 个三次多项式曲线方程,要求整条曲线上具有连续的一阶导数以保证曲线的光滑性。
导弹发动机推力曲线如图5所示,火炮后座力曲线如图6所示,最大后座力为72 kN,作用时间约2.5 s。
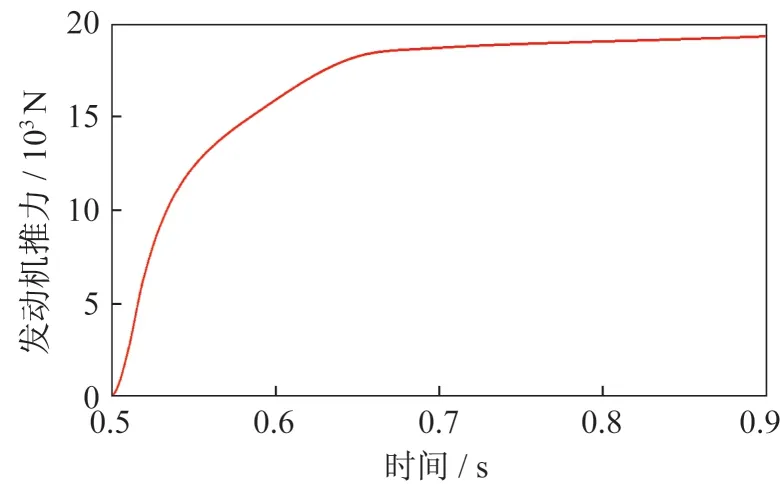
图5 发动机推力曲线Fig.5 Engine thrust curve
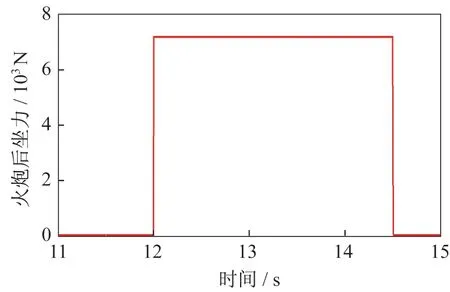
图6 火炮后座力曲线Fig.6 Artillery recoil curve
2.3.3接触力建模
采用非线性的并联弹簧和阻尼来模拟模型中导弹与导轨、悬架限位器间的接触力,接触过程中考虑了Coulomb摩擦效应,其接触力计算公式为

式中:K为刚度系数;C为阻尼系数;e为非线性指数;δ和分别为穿透深度和穿透速度。
接触力参数定义如表1所示。
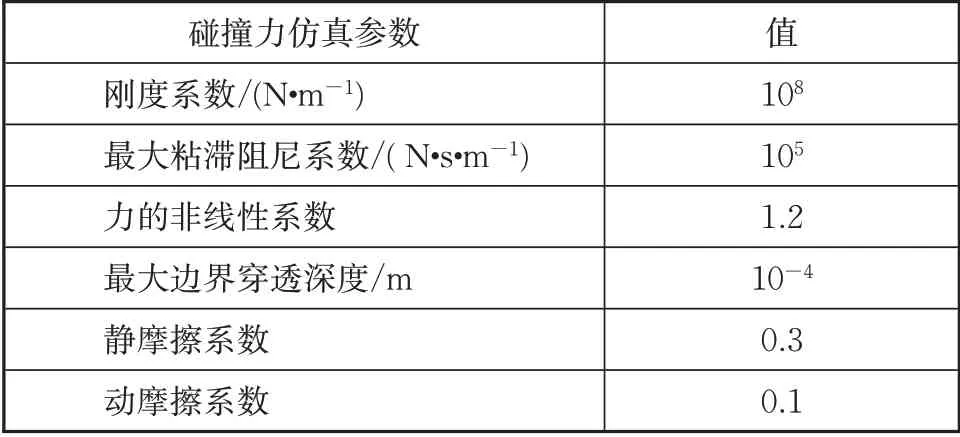
表1 碰撞约束力仿真参数取值Tab.1 Collision binding force simulation parameters

2.4 路谱建模
防御战车行驶过程中,路面不平整会引起车体振动,从而影响导弹和火炮的行进间发射[12]。本文利用ADAMS 软件中Sayers 经典模型进行描述,Sayers 模型[13-14]是基于大量的实测路面数据而建立的。
Sayers 经验模型采用式(3)来描述路面功率谱密度,即
式中:Ge为位移谱密度;Gs为速度谱密度;Ga为加速度谱密度;n为空间频率。根据ADAMS 路面模型标准,Ge、Gs与Ga为同一路面模型的不同参数,定义其中一个,另外两个即可通过转换得出。各等级路面中Sayers模型Gs值见表2。
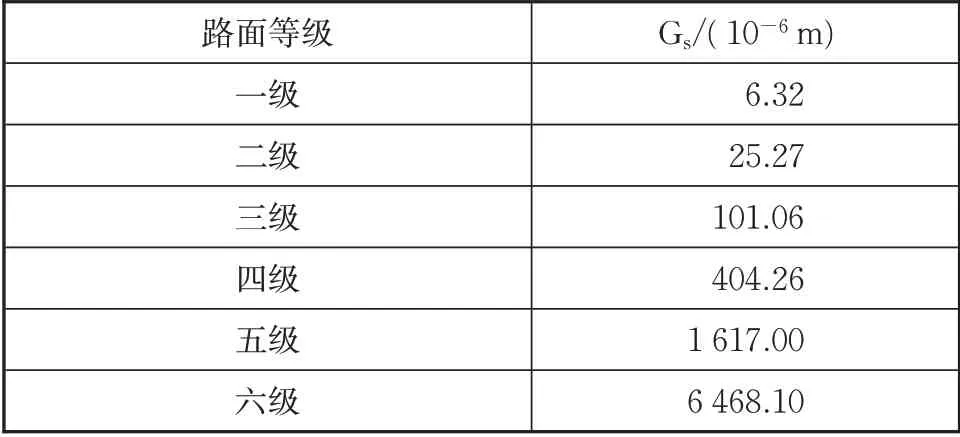
表2 标准路面Sayers模型中Gs参数Tab.2 Gs parameters in Sayers model of standard road
2.5 刚柔耦合多体动力学模型
在建立防御战车多刚体模型的基础上,结合关键部件柔性体模型、特殊力元模型和路谱模型,在ADAMS 仿真平台中建立了防御战车的刚柔耦合动力学虚拟样机模型,如图7所示。模型自由度为690,部件个数为75,弹性体个数为10,圆柱副个数为10,旋转副个数为66,固定副个数为31,运动驱动个数为12。
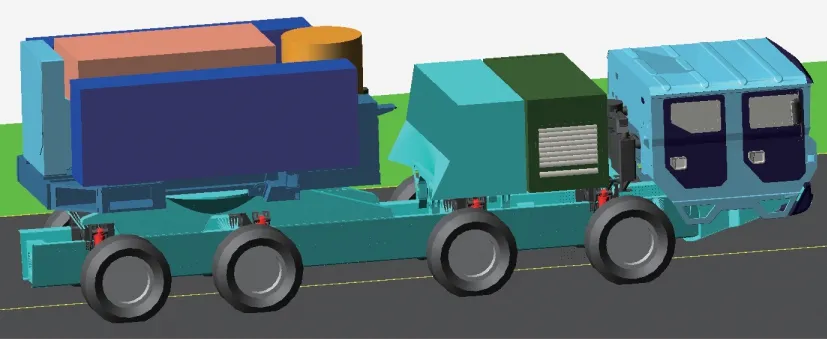
图7 防御战车刚柔耦合虚拟样机模型Fig.7 Rigid-flexible coupling virtual prototype model of defense combat vehicle
防御战车的多体动力学方程为

式中:q、和分别为多体系统的广义坐标及其对时间的一阶、二阶导数;M(q,t)为多体系统的广义质量矩阵;Φ(q,t)和Φq(q,t)为多体系统的约束函数向量及其对广义坐标q的雅克比矩阵;λ为约束的拉格朗日乘子;为广义外力向量。
由于防御战车多体动力学模型中的弹性体规模较大并且存在弹性体接触问题,因此本文利用HHTI3(Hilbert-Huang transform-I3)方法离散防御战车刚柔耦合动力学方程进行求解[15]。
式中:α=(1-γ)2/4(δ=1/2-γ,γ∈[-1/3,0])。HHT-I3法中,数值阻尼的大小与参数γ的选择有关,γ越小系统的能力耗散越多,当γ=0时,HHT-I3法将退化为梯形法。
3 虚拟样机模型验证
为了能准确地预估防御战车在典型工况下的动力学性能,需要对所建立的防御战车动力学虚拟样机模型进行校验。校验虚拟样机模型的常用方法有:主观确认法、动态关联法及频谱分析法等[16]。主观确认法、动态关联法都是定性方法,校验精度相对较低;频谱分析法是定量方法,它通过比较仿真模型输出频谱与试验系统测试频谱的一致性来确认仿真模型的有效性,适用于虚拟样机模型动态性能的验证。
对于防御战车动力学虚拟样机模型,需要确保其发射过程中动态特性的准确性,因此采用频谱分析法对模型进行校验。防御战车虚拟样机模型的校验过程是:在相关参数灵敏度分析的基础上,调整虚拟样机中的模型参数,使防御战车底盘的模态频率、振型与底盘车厂试验结果一致。表3给出了底盘的模态仿真与试验结果对比,图8 给出了底盘一阶、二阶模态振型。

表3 底盘模型校验Tab.3 Chassis model checking

图8 底盘模态振型Fig.8 Chassis mode shapes
通过对比,仿真得出的底盘模态与实测底盘的模态误差仅为4%,说明该战车行进间发射虚拟样机模型的准确性较高,可用作防御战车行进间火炮与导弹发射的动力学特性分析。
4 行进间发射仿真与分析
本文所研究的防御战车发射系统包含火炮与导弹两种发射方式,故分别对战车在行进间发射火炮与导弹两种典型工况进行动力学仿真。
4.1 火炮行进间发射仿真
考核较严酷的工况,战车以规定的速度行驶在四级路面上,转塔方位角90°,发射箱转至最大高低角,火炮高低射角0°条件下进行火炮射击动力学仿真。其中,火炮射击后座力作用时间为2.5 s,后座力为72 kN,仿真结果如图9~11所示。
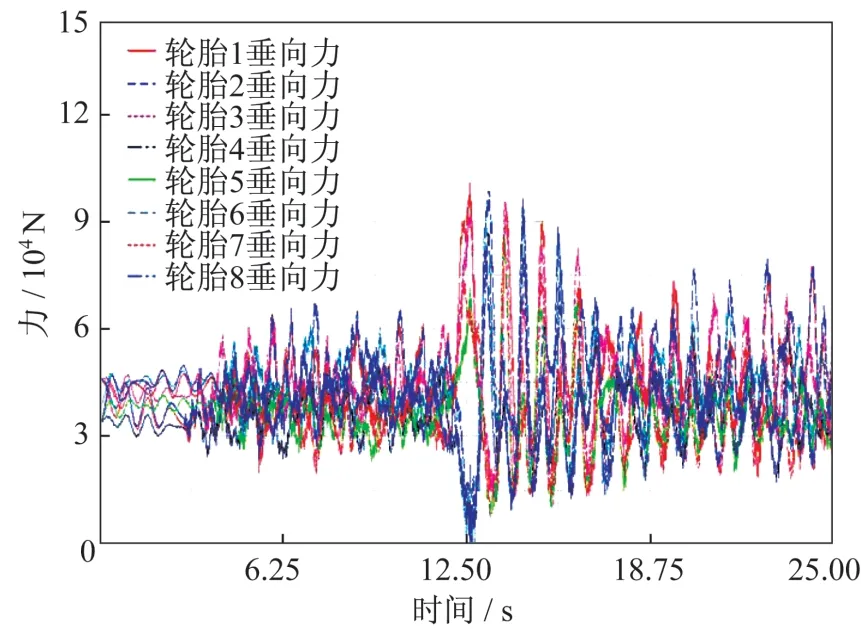
图9 火炮行进间发射轮胎垂向力曲线Fig.9 Vertical force curve of tire during the marching launch of gun
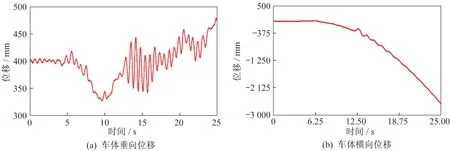
图10 火炮行进间发射车体垂向和横向位移曲线Fig.10 Vertical and lateral displacement curves of vehicle body during the marching lunch of gun
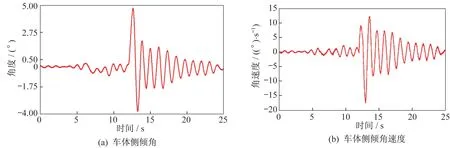
图11 火炮行进间发射车体侧倾角和角速度曲线Fig.11 Curves of inclination and angular velocity of vehicle body during the marching lunch of gun
从图9 可以看出:战车以规定速度行驶在四级路面进行火炮行进间发射的过程中,较大的后座力使整个战车发生了较大侧倾,轮胎上的最大瞬时载荷在100 kN 左右,并且车体一侧的轮胎出现了一次瞬时脱离地面。从图10可以看出:在2.5 s火炮射击后座力作用时间范围内,车体在垂向振动的同时还产生了一定量的横向漂移。从图11可以看出:火炮行进间发射过程中,车体发生了一个周期的侧倾振动,车体侧倾摆动的最大侧倾角为4.7°左右,最大侧倾角速度为17°/s左右。综合图9~11 可以看出:2.5 s 的火炮射击后座力作用时间内,车体虽然发生了一定的横向漂移,侧倾振动幅值较大,但不会发生翻车。
4.2 导弹行进间发射仿真
战车以规定的速度行驶在二级路面上,转塔方位由0°调转至90°,同时发射箱高低由0°调转至规定最大角度,之后导弹发射,仿真结果如图12~13所示。
图9 火炮行进间发射轮胎垂向力曲线Fig.9 Vertical force curve of tire during the marching launch of gun
图10 火炮行进间发射车体垂向和横向位移曲线Fig.10 Vertical and lateral displacement curves of vehicle body during the marching lunch of gun
图11 火炮行进间发射车体侧倾角和角速度曲线Fig.11 Curves of inclination and angular velocity of vehicle body during the marching lunch of gun
图13 导弹行进间发射弹体俯仰角和俯仰角速度Fig.13 Pitch angle and pitch angle velocity of the missile body during the marching lunch of missile
从图12可以看出:战车以规定速度行驶在二级路面进行导弹行进间发射过程中,车体只发生了小幅侧倾振动,最大侧倾角为0.4°左右,最大侧倾角速度为0.2°/s 左右。从图13 可以看出:在规定最大发射角度下,导弹出箱时刻的俯仰角速度为15.1°/s 左右,出筒过程中弹体不会与箱体发生干涉,导弹发射安全可靠。
5 发射分离试验验证
为确定该战车行进间发射的稳定性以及验证本文所建立的虚拟样机模型的正确性,进行了战车实地发射试验,对战车进行了火炮与导弹的行进间发射试验。表4给出了部分仿真结果与试验结果数据对比。
表4 仿真结果与试验结果数据对比Tab.4 Comparison between simulation results and experimental data
从实地发射试验可以看出,战车能够以规定速度行驶在四(二)级路面实现火炮(导弹)行进间发射,动力学仿真结果与物理试验结果基本一致。前期的动力学建模与仿真有效指导了防御战车的改进设计,确保了分离试验一次成功。
6 结 论
依据防御战车三维实体模型、悬挂模型、轮胎模型、路面(谱)模型,基于有限元软件和多体动力学软件建立了防御战车行进间发射虚拟样机动力学模型,进行了火炮和导弹发射两种典型工况下动力学仿真分析,得到如下结论:
1)战车以规定速度行驶在四级路面,转塔方位90°,多发火炮水平连射过程中,车体一侧的轮胎会短暂脱离地面,之后会迅速与地面接触;车体发生了横向漂移,虽然发射装置振动幅度较大,但不会发生翻车。仿真结果表明,能够实现四级路面上的火炮行进间发射。
2)战车以规定速度行驶在二级路面,转塔方位90°,发射架转至最大高低角导弹发射过程中,导弹出箱时刻的俯仰角速度约为15.1°/s,出箱过程中箱弹不会发生干涉。仿真结果表明,能够实现二级路面上的导弹行进间发射。
3)动力学仿真结果与发射分离试验结果基本一致,动力学建模与仿真有效指导了防御战车设计,确保了分离试验一次成功。
猜你喜欢
军事文摘(2022年17期)2022-09-24 01:10:54
小哥白尼(军事科学)(2022年4期)2022-07-08 07:03:34
激光与红外(2021年3期)2021-04-07 12:22:06
小哥白尼(军事科学)(2020年2期)2020-06-16 03:11:04
小哥白尼(军事科学)(2020年7期)2020-05-22 06:24:44
造船技术(2020年2期)2020-05-18 06:53:28
军营文化天地(2017年11期)2017-12-08 08:20:34
工业设计(2016年7期)2016-05-04 04:01:49
制造技术与机床(2014年11期)2014-04-23 12:44:16
小哥白尼·趣味科学画报(2006年8期)2006-03-18 07:41:12
