
基于多源非健全信息融合的配电网主动故障研判方法
2021-06-22 11:12:08汪文达张伟
电气传动 2021年12期
汪文达,张伟
(1.深圳供电局有限公司,广东 深圳 518000;2.积成电子股份有限公司,山东 济南 250100)
2019年两会报告中,国家电网公司提出了“三型两网,世界一流”的战略目标,建设运营好“坚强智能电网”和“泛在电力物联网”是实现世界一流能源互联网企业的重要保障[1-3]。同时,南方电网公司也提出了建设透明电网和数字南网的建设目标,指出基于广域物联网实现数字化转型是实现数字南网的必由之路[4]。基于泛在电力物联网可实现电力数据的全接入、设备状态的全感知、业务处理的全在线。
提升故障研判准确性、减少故障停电时间、提高供电可靠性是衡量供电服务质量的重要指标[5-7]。但是,目前的故障研判多是基于单一数据源进行的研判[8-11]。在配电自动化建设发达的地区多采用馈线终端单元(feeder terminal unit,FTU)、站所终端单元(distribution terminal unit,DTU)等三遥终端采集的故障信号实现故障研判和馈线自动化,在配电自动化建设欠发达的地区多采用故障指示器等二遥终端采集的故障信号实现故障研判和定位,在配电自动化建设不发达的地区多采用变箱户关系与智能电表上送的停电事件等信息进行故障研判和定位。但是,由于各种终端质量参差不齐、施工工艺及安装环境不同,导致大量终端在配电网正常运行时误报故障信号,而配电网故障运行时又漏报故障信号的情况时有发生。故此,大量非健全信息的引入,导致基于单一数据源的配电网故障研判方法准确性欠佳,在实际运行过程中,故障区域多需要调度员人工辅助修正和抢修人员现场巡线,增加了故障停电时间和相关人员工作量。基于多种数据源的综合研判,可在一定程度上弥补单一数据源研判的不足。但是,由于多种数据源的采集周期不同、采集频率不一、时间尺度多样,导致多时间尺度下的故障研判结果的融合和比对较为困难[12-14],研究较少见诸报端。故此,基于泛在电力物联网技术,研究多源非健全信息融合下的故障研判方法,提升主动故障研判准确性,对提高供电可靠性具有重要现实意义。
本文首先建立了主动故障研判的模型,然后确立了主动故障研判结果融合的原则,最后提出了基于非健全信息的故障研判结果融合方法。
1 主动故障研判模型建立
目前的配电网建设中FTU,DTU等三遥终端多采用光纤通信方式,其采集信息准确,但造价昂贵,且需停电安装,一般配置在供电可靠性较高的区域或主干线路的重要分段开关上;故障指示器等两遥终端多采用无线通信方式,其造价较低,且可带电安装,但其信息采集准确度相较三遥终端低,一般配置在供电可靠性适中的区域或分支线路的源端开关后;电表集中器一般安装在配电变压器低压侧的JP柜中,当配电变压器停电时,可以将停电事件上送到用电信息采集系统,在尚未配置馈线自动化终端区域,可由配电变压器上送的停电事件辅助判定跳闸点。
故障发生时,由于各终端通信方式及结构各异,上送故障信息到配电自动化主站的时间也不同。一般情况下,配电自动化主站在故障发生8 s后将接收到所有FTU,DTU采集的故障信号,并启动基于终端的故障研判;故障发生1 min后将接收到所有故障指示器采集的故障信号,并启动基于故障指示器的故障研判;故障发生3 min后将接收到所有配电变压器上送的停电事件,并启动基于停电事件的故障研判。
基于终端的故障研判,其故障定位区间为最后一个上报过流信号的终端与其下游第一个未上报过流信号的终端之间。建立终端故障研判定位集合(terminal fault decision set,TFDS)描述故障区间内包含的所有开关、故障指示器及配电变压器设备,具体为

式中:TSi为终端故障研判定位集合TFDS中第i个设备;n为集合中所含的设备总数;i为设备编号,i=1,2,…,n。
基于故障指示器的故障研判,其故障定位区间为最后一个过流翻牌的故障指示器与其下游第一个未翻牌的故障指示器之间。建立故障指示器故障研判定位集合(fault indicator fault decision set,FFDS)描述故障区间内包含的所有开关、故障指示器及配电变压器设备,具体为

式中:FSj为故障指示器故障研判定位集合FFDS中第j个设备;m为集合中所含的设备总数;j为设备编号,j=1,2,…,m。
基于停电事件的故障研判,其故障定位区间为所有停电配电变压器的上游公共开关所供电的区域。建立停电事件故障研判定位集合(power outage fault decision set,PFDS)描述故障区间内包含的所有开关、故障指示器及配电变压器设备,具体为

式中:PSk为停电事件故障研判定位集合PFDS中第k个设备;h为集合中所含的设备总数;k为设备编号,k=1,2,…,h。
架空配电馈线如图1所示,Bus1为变电站10 kV母线,S1为变电站出线断路器,S2~S10为馈线分段开关,S2配置FTU,S7配置速断保护功能;F1~F4为故障指示器,T1~T7为配电变压器;Fault1为故障点。
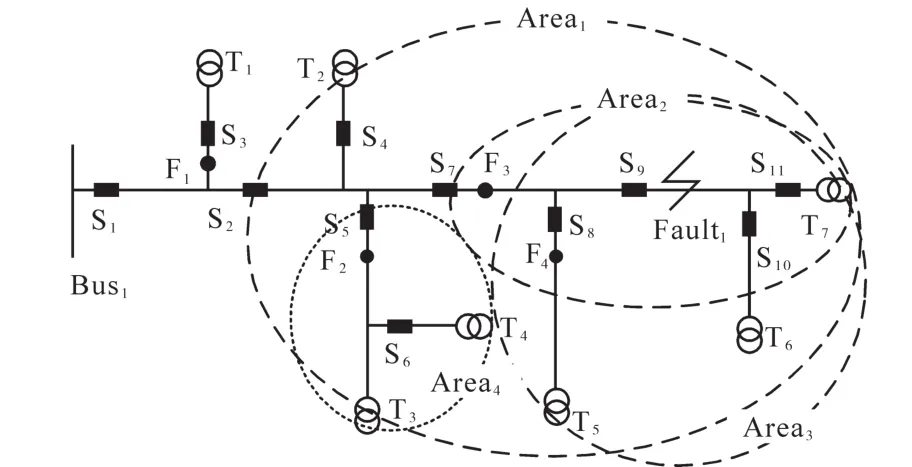
图1 典型架空配电网络图Fig.1 Typical overhead distribution network
当故障发生时,配置FTU的分段开关S2上报过流信号,出线断路器S1上报过流信号,基于终端信号研判故障发生在开关S2下游区域,如图1中Area1所示;配置速断保护的开关S7跳闸,故障指示器F3过流翻牌,F4未过流翻牌,基于故障指示器信号研判故障发生在F3与F4之间区域,如图1中Area2所示;开关S7跳闸后,配电变压器T5,T6,T7上报停电事件,基于停电事件研判故障发生在三个配电变压器的上游公共开关S7的下游区域,如图1中Area3所示。各故障研判定位集合如表1所示。
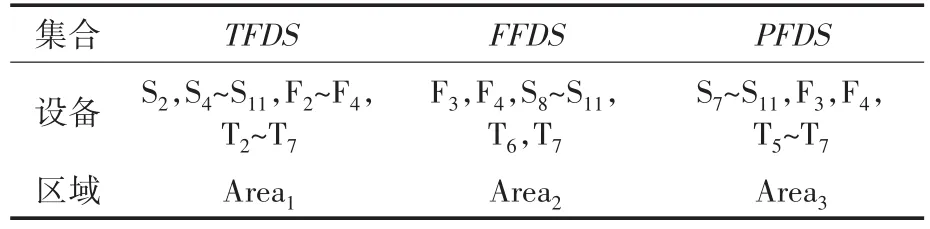
表1 故障研判定位集合表Tab.1 Fault diagnosis and decision set table
2 基于多源非健全信息的故障研判融合方法
2.1 主动故障研判结果的融合
不同故障研判定位区间之间存在3种相互关系:相含、相交和相离。
所谓相含是指两种故障研判定位集合之间存在包含关系,一个故障定位区间在另一个故障定位区间之中。如图1中Area1与Area2所示,集合TFDS包含集合FFDS。
所谓相交是指两种故障研判定位集合之间存在交集,一个故障定位区间与另一个故障定位区间存在公共区域。如图1中Area2与Area3所示,集合FFDS与集合PFDS相交。
所谓相离是指两种故障研判定位集合之间不存在交集,一个故障定位区间与另一个故障定位区间无任何公共区域。如图1中Area2与Area4所示。
同一个故障,由于采集装置及研判方法的不同,导致故障定位区间的各异。本着审慎及尽可能缩小故障定位区间的思想,建立主动故障研判结果的融合原则为:
原则1:若两种故障研判定位集合为相含关系,则以被包含集合为融合后的定位集合;
原则2:若两种故障研判定位集合为相交关系,则以公共集合为融合后的定位集合;
原则3:若两种故障研判定位集合为相离关系,则以两集合的并集为融合后的定位集合。
具体描述为
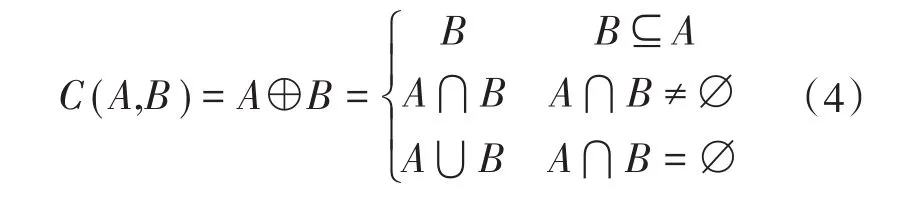
式中:A,B为两种故障研判定位集合;C(A,B)为融合后的定位集合;“⊕”为两种集合的融合运算。
2.2 主动故障研判结果的融合
在实际运行过程中,由于设备的质量及运行环境的不同,导致终端经常误报或漏报故障信号。大量非健全信息的引入致使故障研判结果跟实际情况存在偏差。文献[6]提出了一种基于主观贝叶斯理论计算各区间故障发生概率的方法,在一定程度上解决了单数据源非健全信息下的故障判定问题,但对多种数据源的非健全信息故障判定尚未涉及。
由于配电终端、故障指示器、停电事件上送主站的时间不同,一般故障后8 s启动基于终端的故障研判,故障后1 min启动基于故障指示器的故障研判,故障后3 min启动基于停电事件的故障研判。故此,故障后1 min可以首先对基于终端和故障指示器的研判结果进行第1次融合;融合后的结果在故障后3 min再与基于停电事件的故障研判结果进行第2次融合,最终获得基于非健全信息的故障研判融合结果。
设概率最大的两个终端故障研判定位集合为TFDS1,TFDS2;概率最大的两个故障指示器故障研判定位集合为FFDS1,FFDS2,则这4个集合之间存在TFDS1⊕FFDS1,TFDS1⊕FFDS2,TFDS2⊕FFDS1,TFDS2⊕FFDS24种融合结果。定义融合信息熵(fusion information entropy,FIE)描述两个故障研判定位集合融合后的故障概率,具体为

式中:P(A),P(B)分别为集合A,B的故障概率。
融合信息熵越大,表示两种集合融合后的故障概率越大。
将4种情况下融合信息熵由大到小的顺序生成第1次融合信息熵数列(first fusion information entropy sequence,FFES),具体为

式中:FFE1~FFE4为4种情况下的融合信息熵,FFE1最大,FFE4最小。
为尽可能准确地确定故障区域,舍弃融合信息熵小的FFE3与FFE4,取概率大的FFE1与FFE2两种情况根据式(4)进行融合。
设融合信息熵FFE1,FFE2对应的第1次融合后定位集合为C(e),C(f),则使用该集合与基于停电事件的故障研判结果进行第2次融合。设概率最大的两个停电事件故障研判定位集合为PFDS1,PFDS2,则这 4 个集合之间存在C(e)⊕PFDS1,C(e)⊕PFDS2,C(f)⊕PFDS1,C(f)⊕PFDS24种融合结果。
将4种情况下融合信息熵由大到小的顺序生成第2次融合信息熵数列(second fusion information entropy sequence,SFES),具体为

式中:SFE1~SFE4为4种情况下的融合信息熵,SFE1最大,SFE4最小。
为尽可能准确的确定故障区域,舍弃融合信息熵小的SFE3与SFE4,取概率大的SFE1与SFE2两种情况根据式(4)进行融合。
设第2次融合后定位集合为C(x),C(y),则基于非健全信息融合后的故障区间最大可能区域为集合C(x)包含区域,其故障概率为SIE1;次最大可能区域为集合C(y)包含区域,其故障概率为SIE2。
多数据源的故障研判2次融合方法,可以通过集合的融合运算,避免单数据源下非健全信息对研判结果造成的偏差过大,有效缩小故障研判定位区间。
3 实例分析
图2为两条“手拉手”馈线组成的配电网络,其中馈线Feeder1为架空线路,馈线Feeder2为架空与电缆混合线路。Bus1,Bus2为变电站10 kV母线;S1,S26为变电站出线断路器;S2~S25,S27~S48为馈线分段开关;S2,S7,S9,S12,S17,S19,S28,S30,S42,S44配置 FTU;S34~S37配置DTU;S12,S42配置速断保护功能;F1~F16为故障指示器;T1~T31为配电变压器;Fault1为故障点;L1为联络开关。
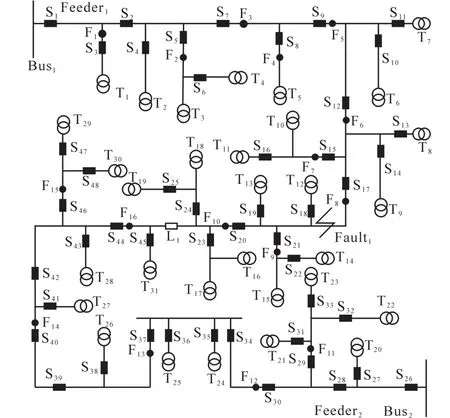
图2 典型“手拉手”配电网络图Fig.2 Typical hand in hand distribution network
故障发生后,开关S12速断跳闸,但由于FTU故障,未能上报故障信号和开关状态;故障指示器F6误报过流翻牌信号;配电变压器T8误报停电事件,配电变压器T12,T14,T16漏报停电事件。基于单数据源的非健全信息故障定位区间及概率如表2所示。
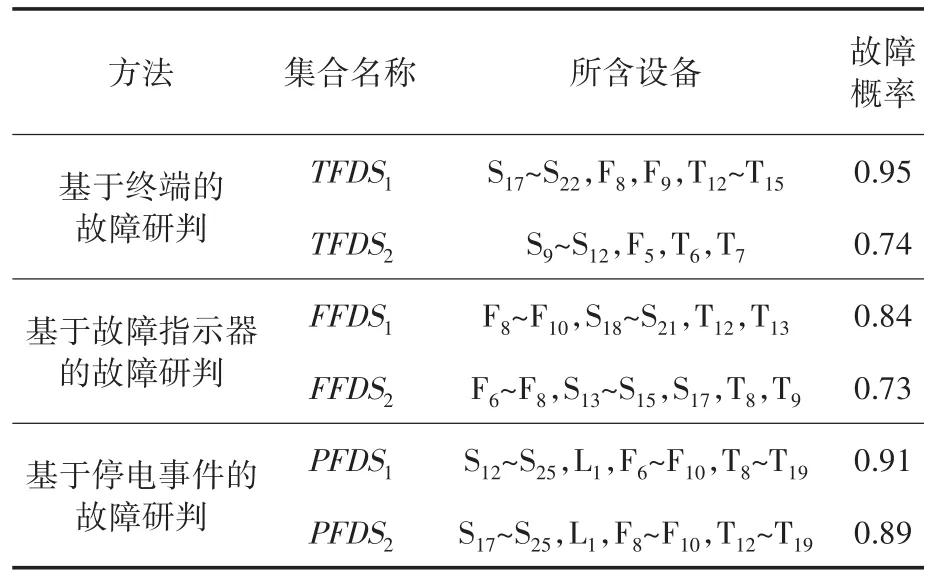
表2 故障研判定位信息表Tab.2 Fault diagnosis and positioning information table
由表2可知,由于开关S12漏报故障信息和状态,导致开关S9~S12围成的非故障区域故障概率较大;由于F6误报过流信号,导致F6~F8围成的非故障区域故障概率较大;由于T8误报停电事件,导致开关S12发生跳闸的概率最大。
根据第2节所述方法,由式(4)~式(6)对集合TFDS1,TFDS2,FFDS1,FFDS2进行第 1 次融合,融合后的故障研判定位集合及信息熵如表3所示。
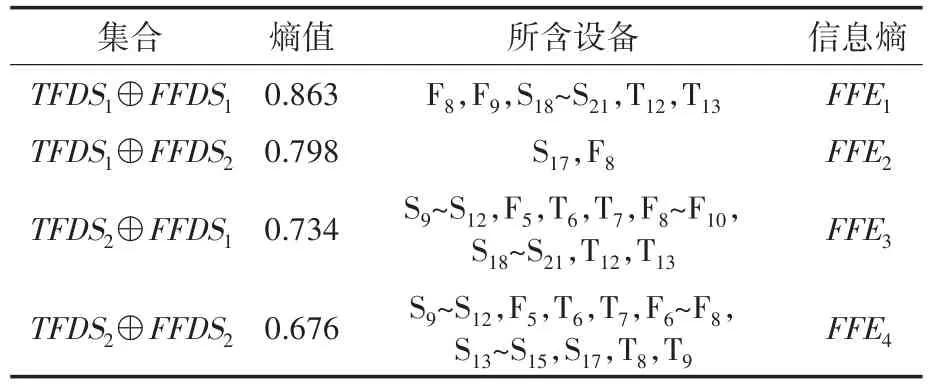
表3 第1次融合后的集合信息表Tab.3 Information table for the first fusion
取融合信息熵最大的FFE1与FFE2对应的TFDS1⊕FFDS1,TFDS1⊕FFDS2作为第 1次融合后的定位集C(e),C(f),并使用该集合与基于停电事件的故障研判结果进行第2次融合。融合后的故障研判定位集合及信息熵如表4所示。
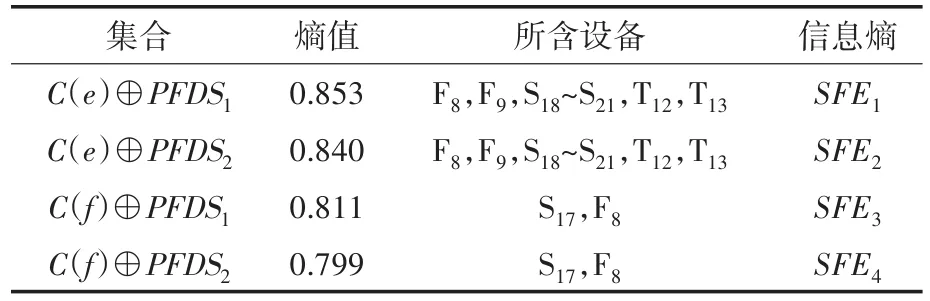
表4 第2次融合后的集合信息表Tab.4 Information table for the second fusion
取融合信息熵最大的SFE1与SFE2对应的C(e)⊕PFDS1,C(e)⊕PFDS2作为第2次融合后的定位集C(x),C(y)。由表4可知,C(x)与C(y)相同,故此基于非健全信息融合后的最终故障区间为设备 F8,F9,S18~S21,T12,T13围成的区域,该区域是故障Fault1可以研判的最小区域。
4 结论
本文建立了主动故障研判的模型,以终端故障研判定位集合、故障指示器故障研判定位集合及停电事件故障研判定位集合为例描述了3种不同研判方法的故障定位区间。为尽可能缩小故障定位区间,确立了主动故障研判结果融合的3个原则。基于该原则和融合信息熵,首先对终端故障研判定位集合与故障指示器故障研判定位集合进行了第1次融合;然后对停电事件故障研判定位集合与第1次融合后的集合进行了第2次融合,最终确定了基于非健全信息的故障研判融合结果。实例分析表明,该方法可以通过集合的融合运算,避免单数据源下非健全信息对研判结果造成的偏差过大问题,有效缩小故障研判定位区间,提升故障抢修的效率,提高供电可靠性。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01 06:28:50
江苏安全生产(2022年3期)2022-04-19 10:47:18
中国外汇(2019年20期)2019-11-25 09:54:52
中国外汇(2019年18期)2019-11-25 01:41:48
电子测试(2017年12期)2017-12-18 06:35:48
中国交通信息化(2017年12期)2017-06-06 07:23:55
雷达学报(2017年6期)2017-03-26 07:52:58
湖北农机化(2016年1期)2016-03-07 22:47:23
池州学院学报(2015年3期)2016-01-05 01:13:00
中国新技术新产品(2015年9期)2015-07-18 08:10:38
