
光伏电站智能运维无人机技术研究
2021-06-22 03:32李瑫黄浩陈李松孙龙张超
电子元器件与信息技术 2021年3期
李瑫,黄浩,陈李松,孙龙,张超
(中国电子科技集团公司第四十八研究所,湖南 长沙 410111)
0 引言
我国已成为全球光伏发电装机容量最大的国家。截止2019年底,我国光伏电站累计装机规模已达到204.3GW。面对如此庞大的市场规模,如何通过运营维护来提高光伏电站的发电效率、降低运维成本,保障光伏电站收益的最大化,越来越受到电站业主和投资者的关注。由于光伏电站选址多在沙地、山坡等偏僻区域且规模较大,常规的人工巡检方式已无法满足电站运维智能高效的要求。
智能无人机技术的发展和应用为光伏电站巡检指明了新的方向。通过搭载红外成像相机和可见光成像相机,智能运维无人机可提供组件红外检测、表面灰尘检测、隐裂检测等多种检测,还能实现实时监测、分析、智能诊断等功能,对光伏电站智能运维大有益处。因此,研究光伏电站的智能运维无人机系统及技术,具有重要的现实意义。
根据光伏电站运维需求载荷小但要求机动灵活的特点,小型的多旋翼是比较合适的选择。本文选取结构简单、体积更小、机动性更强的四旋翼,研究适应于光伏电站运维的智能无人机设计、控制及运维技术,并进行试验验证。
1 四旋翼的设计
四旋翼无人机可分为三个部分:动力系统,支撑结构,控制系统。另外,无人机用于执行任务还需要任务设备。
1.1 动力系统设计
动力系统设计的目标是保证旋翼提供足够升力的同时保持足够的续航时间。螺旋桨和电机是提供系统动力的部件,合适的螺旋桨与电机的匹配对提高多旋翼性能和效率有着直接的影响。螺旋桨的参数有尺寸、螺距、桨叶数等,对于多旋翼无人机,二叶桨的效率是最高的;多旋翼使用的电机多为无刷直流电机,其参数有尺寸、KV值等,相对来说,KV值小的电机力矩大、转速低、效率高。两者参数的设计选取应使总力效(螺旋桨力效×电机效率)达到最高。
动力系统参数的设计可以通过理论计算获得,但过程繁琐,计算过程中的一些参数也较难确定,因此本文采取根据经验设计参数再进行校核的方法。根据设计指标载荷能力≥500g、续航≥20Min,预估满载重量2000g。根据经验,为保证电机稳定运行,多旋翼满载重量不超过电机及桨最大拉力的2/5,则单轴(电机和桨)最大拉力应≥1250g;同时,在油门在50%左右时,多旋翼应能实现悬停,即单轴拉力应在500g左右。通过查找电机性能参数表,可以选取合适的电机及桨叶,并确定电压等级。
1.2 控制系统设计
飞行控制器是多旋翼的核心器件,主要包括导航、控制和决策三大功能。目前主流的开源飞控有APM和Pixhawk,其中Pixhawk是一款高级自动驾驶仪系统,其前身是APM,采用了目前新标准的STM32F427(带FPU)及STM32F103双处理器且搭载了NuttX的实时操作系统,在模型自动控制方面有着出色的性能、灵活性和可靠性。且可以选用APM:Copter或者PX4原生固件来实现飞行控制。目前APM是开源飞控的标杆,其固件成熟、稳定、功能丰富且可定制,用户众多。因此本文采用Pixhawk飞控,搭载APM:Copeter固件,并选取Mission Planner软件作为地面站。
经过上述设计,本文所研究的多旋翼无人机配置如表1。

表1 多旋翼无人机配置
2 位姿闭环控制研究
四旋翼通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。其有6个自由度,却只有4个控制输入,是不稳定、时变、非线性、高阶、强耦合、欠驱动的多输入多输出系统[1],因此其位置姿态控制是四旋翼无人机的重点研究课题。本文建立所设计四旋翼的数学模型,并对其位姿闭环控制器进行设计。
2.1 四旋翼动力学建模
2.1.1 坐标变换
飞行器的运动可以完全分解为相对地面坐标系的平移运动和相对于机体坐标系的姿态运动两部分。在不同方向上的位移以及飞行速度的衡量是相对地坐标系而言,飞行器的俯仰角、滚动角和偏航角的定义则是相对机体坐标系而言,为正确表征飞行器的运动状态,需要建立机体坐标系到地坐标系的转换关系,用矩阵表示如下[2]:

式中:c表示cos函数,s表示sin函数,θ、ψ、δ分别表示飞行器的偏航角、俯仰角和横滚角。
2.1.2 平移运动模型
在地面坐标系中,根据牛顿运动定律,并考虑空气阻力,有[3]:


将其转换至地面坐标系中,并代入(式2),得[4]:

上式即为平移运动的状态方程。
2.1.3 姿态运动模型

根据牛顿-欧拉方程,并考虑机体及旋翼的螺旋效应,有:



联合式(5)和(6),可得四旋翼的姿态运动方程:

综上所述,四旋翼的动力学数学模型如下:

动力学模型的相关参数值如表2。

表2 四旋翼动力模型参数
2.2 闭环控制器设计
本文采用串级PID控制算法对飞行器的位置和姿态进行双闭环控制,其结构如图所示。图中,内回路为姿态控制回路,C1为内回路控制器;外回路为位置控制回路,C2为外回路控制器。内回路是外回路位置控制的基础,通过控制飞行器的3个欧拉角,实现对飞行器的姿态控制,进而实现对飞行器位置控制[6]。
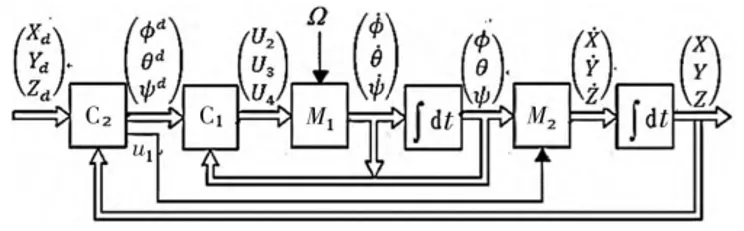
图1 四旋翼闭环控制器结构图
外环PID控制器以当前角度为输入量,遥控输入量和初始水平位置角度的和为期望值,偏差是期望值与输入量之差。外环PID的控制目标是使偏差为0,即使四旋翼无人机由当前飞行状态纠正到目标飞行状态。其积分的计算是偏差的累积,为防止持续积分使得积分量太大造成系统超调,必须进行积分限幅,通常设定积分限幅量为遥控最大角度量的一半。其微分计算是将当前偏差与上一次偏差计算得到的差值来与微分时间相除,微分值的大小表示了偏差变化的快慢关系。
内环PID控制器以外环控制角度输出量为内环角速度PID控制的期望值,其输入量是从陀螺仪采集到的角速度值,偏差为期望值与输入量的差值,输出量为3轴的角速率。与外环一致,其积分计算对偏差进行累加,并且进行积分限幅;微分计算是将当前角速度偏差与上一次角速度偏差计算得到的差值来与微分时间相除。通过计算可得到内环角速度PID控制的输出量,再结合油门解算四个电机的转速可得电动机转动时的PWM脉冲宽度控制量。
本文在仿真模型的基础上进行了PID整定。仿真得出相关参数的取值区间,取中值进行飞行试验,根据实际飞行效果对参数进行微调,最终得到较为理想的PID控制参数见表3。

表3 四旋翼无人机控制PID参数
3 智能运维技术研究
3.1 自动作业路径规划
对于选定的巡检区域,运维系统应能根据设定参数自动规划出无人机巡检飞行路线,指挥无人机按规划自动起降和飞行,实现“一键巡检”的简易操作功能。这可借助于Mission Planner地面站软件的“飞行计划”功能来实现:绘制多边形,将作业区域用多边形框选出来,通过“自动航点/区域”创建测绘任务,设置任务高度、路径间隔、航点间隔、起始为Home点以及每个航点的动作等,即可自动规划飞行路径并生成飞行任务。将任务上传至飞控,在无人机起飞时设置为自动操控模式,即可自动开始巡检作业,完成后返回降落。若区域内有障碍物,也可通过多边形将障碍物框出,规划路径将避开障碍物区域。
3.2 全景图像生成
全景图像生成是应用3D重建技术对航拍的图像进行拼接处理,生成所扫描区域的三维全景图像。主要的流程为特征提取与匹配->图像配准->图像拷贝->图像融合->拼接图像导出[7]。
第一步就是特征点提取。现在CV领域有很多特征点的定义,比如SIFT、SURF、Harris角点、ORB都是很有名的特征因子。但SIFT计算量很大,它的改进方法SURF在速度方面有了明显的提高[8],因此本文采用SURF进行图像的特征提取。在特征点被检测出来之后,需要以某种方式将它们关联起来。本文采用RANSAC(Random Sample Consensus)算法来估算单应矩阵,通过调用findHomography函数并在参数中选泽CV_RANSAC来实现图像的可靠配准。第三步是图像拷贝,就是将图像直接拷贝到配准图上。最后一步是将所有输入图像变形并融合到一个符合的输出图像中。首先计算每个输入图像的变形图像坐标范围,得到输出图像大小,之后使用反向变形,将每个输入图像的像素映射到参考图像定义的平面上,最后在重叠区域融合像素颜色,以避免接缝。最简单的方法是使用羽化(Feathering),即将图像的重叠区域的像素值按一定的权值相加合成新的图像。
4 试验验证
本文所研制的无人机及其飞行照片如图2所示。飞行器在载荷623g、全重2838g情况下正常起飞,在油门50%左右实现悬停,说明动力配置比较充裕。在自稳模式和定高模式下,飞行器的姿态曲线及高度曲线如图3所示。

图2 四旋翼无人机实物及飞行照片
从图3中可以看出,自稳模式下飞行器实际姿态角与期望姿态角的跟随特性较好,且波动幅度较小,说明姿态内环控制效果良好,飞行稳定;定高模式下高度跟随快、保持精度较高,说明位置外环动态响应特性好,稳定性及稳态精度高。
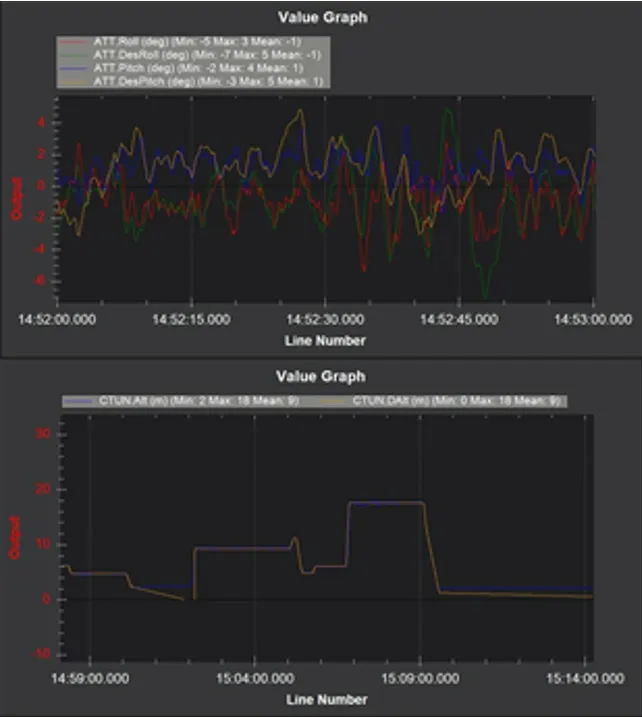
图3 四旋翼姿态控制曲线及高度曲线
利用地面站飞行计划设置测绘任务,相对高度50m,路径间隔30m,航点间隔30m,自动生成的飞行路径如图4中黄色路径所示;将操作切换到自动模式,解锁无人机后轻推油门回中,飞行器即执行飞行及拍照任务,其自主飞行路线如图4中紫色路径所示。

图4 飞行器自动路径规划及自主飞行
从图4中可见,飞行器飞行与规划路线保持高度一致,且起飞后自主按路径完成巡检任务后自主返航降落,真正实现了“一键巡检”的简单操作。
应用基于OpenCV开发的图像拼接程序对飞行过程中拍摄的照片进行离线拼接处理,生成的全景图像如图5所示。图像的中心区域拼接效果良好,建筑物轮廓特征匹配正确且融合自然。但边缘的拼接出现扭曲,这一方面是因为边缘的照片数量少,部分特征无法匹配,另一方面也可在拼接融合算法方面进一步改进。

图5 全景图像拼接效果图
5 结语
利用无人机进行光伏电站的运维巡检技术可行且优势明显。本文自制的四旋翼无人机可以满足光伏运维的载荷、续航时间要求,且飞行控制稳定可靠,可以胜任光伏电站巡检及场址勘测等任务。在运维功能方面,本文利用开源地面站软件,比较简便地实现了巡检区域的选定和飞行路径的自动规划,加载了巡检任务的无人机可以实现“一键巡检”的简便操作;利用OpenCV开发的全景图像合成软件效果良好,中心区域的图像拼接融合效果满足大场景图像效果要求,边缘区域也可通过减少图像拍摄间隔、适当扩大边缘巡检区域、进一步优化拼接融合算法等进行改善。再进一步采用红外、可见光双光摄像头,即可实现对光伏电站的热斑检测、积尘检测等智能运维功能。可以肯定,智能运维无人机技术必将在光伏电站得到广泛应用,成为光伏电站智能运维的有力助手。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
中学生数理化·中考版(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
建材发展导向(2019年5期)2019-09-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
小朋友·快乐手工(2015年5期)2015-06-06
