单镜头无人机的实景三维建模研究
2021-06-18 03:38雷英栋沈旭东吴湘莲
电子测试 2021年8期
雷英栋,沈旭东,吴湘莲
(嘉兴职业技术学院,浙江嘉兴,314051)
1 背景
随着科学技术的不断发展,城市管理的信息化程度越来越高,构建数字三维城市,已经成为城市管理中的重要手段,城市三维模型的构建,对于城市的建设与规划,管理和应急响应处置等,都发挥着重要作用。
传统的地形测绘,是按照一定比例尺,逐点完成地形特征点数据采集,设备多、重量大、成本较高、工作强度也大、效率低、精度更是难以保证。伴随着近几年来无人机技术长足的发展,以及无人机倾斜摄影测量技术的出现,装载多镜头传感器进行倾斜摄影,利用软件快速生成三维模型,变得更加高效和低成本。越来越多的从业者充分利用无人机倾斜摄影技术进行三维建模。
主流的方案是使用工业级无人机搭载倾斜摄影五镜头相机构建城市实景三维模型,虽然提高了作业效率,但是价格就会相当昂贵,并且笨重的多镜头相机,对无人机的工作稳定性和续航能力提出了更高的要求,所以运用无人机多镜头进行倾斜摄影测量,成本和技术门槛还是很高的。
随着消费级无人机的快速发展,消费级无人机,如大疆,具有相对较低的价格,并且容易上手操作,申请空域也较为方便等优势,逐渐成为寻常百姓获取影像资料的平台。利用单镜头无人机获取航拍影像,在相对较小的城市实景三维建模项目中优势明显。
另外,计算机不断提高的硬件性能,计算机视觉技术和运算能力的不断进步,已经可以实现超多影像资料进行快速密集匹配的功能。此外,随着ContextCapture,Pix4D,PhotoScan等三维重构软件的不断发展进步,己经可以利用消费级的单镜头无人机,甚至是手机采集的影像,进行自动化构建三维模型。这为单镜头无人机实现实景三维建模提供了后期处理的软件支撑。
本文主要研究基于大疆御2Pro无人机,应用地面站软件为Altizure进行航线规划、照片采集,利用ContextCapture软件,完成后期空三运算和三维模型构建。
2 无人机倾斜摄影测量技术
■2.1 倾斜摄影测量技术
倾斜摄影测量是一种对物体进行从多个方向观测的航空摄影技术,从不同的方位去采集物体的侧面和顶面纹理,采集清晰度高、精度高、范围大的被测区域图像信息,后期利用先进的定位、融合、三维建模技术重建实景三维模型,以此表达出被测区域物体的几何属性,保证达到测绘级精度。该技术在20世纪90年代开始在国外发展,而我国开始于2010年的4月份。
通过消费级单镜头无人机倾斜摄影测量技术构建实景三维建模,在理论上可以实现,这降低了倾斜摄影测量技术的经济成本和技术门槛,在小范围内实现实景三维模型的快速构建提供新的思路,具有一定的应用价值。
■2.2 基本思路
本项目基于无人机倾斜摄影技术,尝试使用单镜头无人机作为信息采集平台,采集实验区的图像数据,进行城市实景三维模型构建,实验以某一区域为例,构建其实景三维模型,验证单镜头无人机是否可以用于城市实景三维模型的构建。通过地面站软件操纵无人机按照地面站软件设计航线飞行,获取倾斜多视角影像;图像预处理后导入三维建模软件,由软件进行空中三角运算,完成三维建模,得到粗模。技术路线如图1所示。
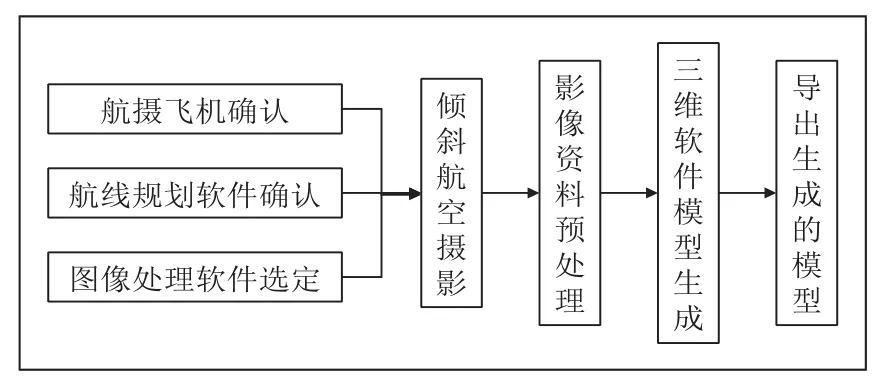
图1 单镜头无人机实景三维建模技术路线
3 单镜头无人机实景三维建模
■3.1 单镜头无人机的选型
本文选用大疆的御2Pro无人机进行图像信息采集,该无人机机身为折叠结构,便于携带,续航时间官方标注为31分钟,结合大疆的飞控系统,飞行异常稳定、灵活,相比工业无人机价格合理。该无人机搭载1英寸CMOS单镜头相机,2000万有效像素的,具备了获取影像信息的条件。
此外,御2Pro搭载了GPS+GLONASS的卫星定位系统,图像可以记录POS数据,完全达到了高精度定位的要求。在安全性上,御2Pro无人机配备了全向感知系统(前后下双目视觉系统,左右单目视觉系统,上下红外传感器),上下前后左右都有可感知障碍物距离的能力,可以有效保障无人机飞行安全。
■3.2 地面站软件选择
目前,国内外常用的无人机航线规划控制软件有:Litchi Vue, Altizure,DJI GS Pro, Rocky Capture等。
本项目采用的是Altizure,该软件是集航线规划、照片采集和三维浏览为一体的移动端平台,可以用于控制 DJI (大疆创新)各系列无人机,帮助快速规划航线,拍摄正射和倾斜照片。

图2 Altizure软件航线规划界面
■3.3 无人机倾斜摄影数据采集
实景三维建模要想获得高清晰,高质量的倾斜摄影图像信息,一般来说对于同一个特征点和地表物品,需要有三张以上小于15°角的不同角度的图片覆盖,覆盖度越大、重叠度越高,后期处理就能得到精细程度越高,质量越好的实景三维模型,但会导致计算机的负荷加大,计算时间越长。所以考虑到效率和模型质量的平衡,并结合当地实际的环境情况,对无人机测绘路径进行规划,针对被测对象确定飞行高度,速度,影像采集密度,航向重叠度,旁向重叠度等。
(1)设置航高
针对不同的实景三维建模任务,飞行的高度也略有不同,主要是结合模型的用途和所要达到的分辨率,在依据航高的计算公式来以此确定航拍的高度。一般情况下,进行低空测绘,70-80m的航高足以满足要求。
本次测量实验区的区域面积不大,长度大约90米,宽度大于60米。建筑物高度在15m上下,周边建筑物高度不超过40m,因此,本次航测将航高设定为80m。
(2)设置像片重叠度
图像的重叠度包含两项内容,分别是航向重叠度和旁向重叠度。根据航摄中对于图像信息重叠度的要求,一般情况下要求航向重叠度应保持在60-80%,但是不能小于53%;旁向重叠度一般应保持在15%-60%,但是不能小于8%,越高越好,后期成图率就越高。建议采集航向重叠不小于80%,旁向重叠不小于50%的影像。本项目将航向重叠度设为80%,旁向重叠度设为70%,保证获取更多的图像信息。
(3)设置航线参数
航线是根据测区的面积来确定的,可以确定飞行航向及航线长度,一般为“之字形”航线,飞行的速度不宜过大,摄影基线长度和航线间隔宽度都可根据相关公式计算得出,倘若使用地面站软件,软件将自动生成航线并确定航线间隔宽度。
消费级无人机御2Pro作为航摄的飞行平台,相机的倾角设为45°,飞行的平均速度设为3m/s,整个航摄任务大约需要飞行40分钟。实验区飞行计划的详细信息如表1所示。
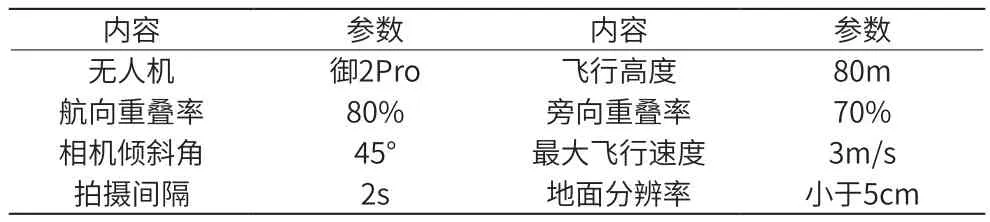
表1 飞行计划详细信息表
■3.4 实景三维建模
对于三维建模系统,目前国内外主流的几种航测实景建模软件主要包括:ContextCapture,PhotoScan,Pix4D Mapper等。
本文选用的是ContextCapture软件,实现航测区域较高精度的还原。ContextCapture是Bentley旗下的一款三维实景建模软件,使用ContextCapture,用户可以快速为各种类型的基础设施项目生成三维模型。其具体作业流程如图3所示。
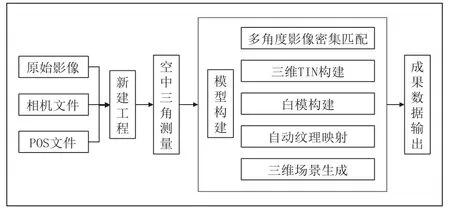
图3 Context Captur软件建模流程
本次共采集图片116幅,导入软件后,经过空三运算后,使用多视影像密集匹配技术生成密集点云,如图4所示。地面物体越复杂,建筑物越密集,点的密集程度越高。
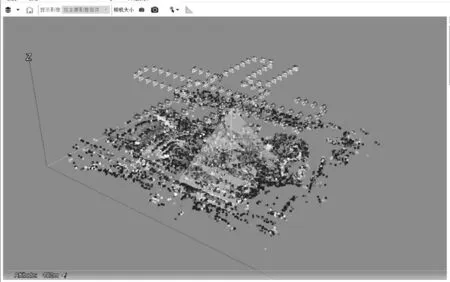
图4 多视影像密集匹配
软件经过空三运算和影像密集匹配的结果,构成了三角TIN,再构成白模,软件自动将得到的纹理效果,映射到白模上,最终形成了实景三维模型数据,如图5所示。
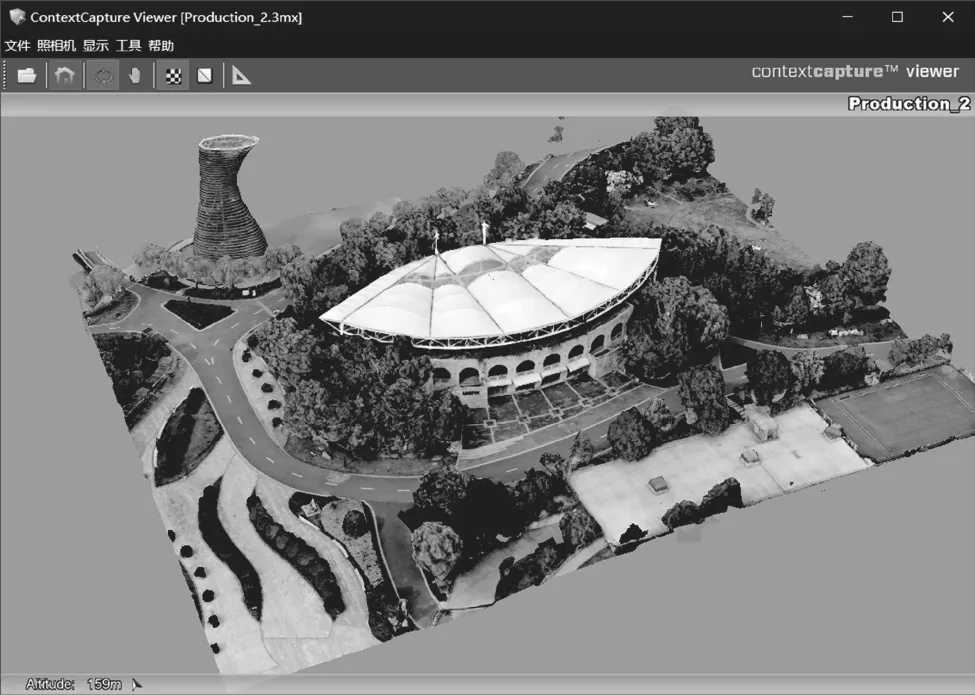
图5 试验区域实景三维模型
4 结语
本文从单镜头无人机的选择,到比较不同的地面站工具,对单镜头无人机的实景三维建模进行了探索,实现了对某一区域的三维建模。与传统五镜头或两镜头倾斜摄影相比,单相机倾斜摄影方案成本更低,并且大幅度的提高了作业生产效率,在精度要求不是非常高的实景建模项目中具有较好的实际应用效果。经验证,单镜头无人机实景三维建模,能适用于校园规划、城市建设等,同时在自然灾害监测、文物保护等领域也有一定的实际意义。但是本文操作实践过程中也存在不足,文中并没有进行像控点布设,这在一定程度上影响了建模精度;另外,输出的模型没有经过修复,存在模型的边缘细节表现不够准确,个别地物纹理缺失,建模地形与实际地形不一致等问题,这需要在今后的作业中不断完善改进。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
小哥白尼(神奇星球)(2021年12期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
北方音乐(2017年4期)2017-05-04
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
现代防御技术(2014年6期)2014-02-28