
考虑馈线阻抗的虚拟电阻补偿VSG控制策略
2021-06-18 00:29闫斌斌王伟宏
黑龙江电力 2021年2期
闫斌斌,葛 亮,王伟宏,王 曦,郜 磊
(国网山西省电力公司检修分公司,太原 030000)
0 引 言
下垂控制根据电压源逆变器输出功率控制逆变器输出参考电压幅值与频率。当并列运行的微源逆变器馈线阻抗和负载功率因数相同时,各微源可以相互独立地通过下垂控制实现输出功率自动分配,实现热插拔和热冗余运行,并且在并离网模式下通用。然而由于微源逆变器馈线阻抗的影响,传统下垂控制无法实现功率的精确分配和消除功率耦合问题,从而影响微网的稳定运行。
低压微网中,通过微源逆变器功率传输后,由于隔离变压器和阻性线路的影响,会使逆变器的传输阻抗中阻性分量增大到不可忽略,进而需要加入较大虚拟电阻来补偿逆变器传输阻抗中的阻性分量,从而降低并联运行的微源逆变器的稳定性[1-4]。通过虚拟坐标变换,把传输的有功功率和无功功率可以进行解耦控制,当并联运行的微源逆变器的馈线阻抗角相同时,通过下垂控制可以实现功率的精准分配[5-6]。
与传统下垂控制相比,基于虚拟同步发电机(Virtual Synchronous Generator,VSG)技术的逆变器控制策略通过将分布式电源与储能系统等效模拟为同步发电机,有效解决系统欠阻尼、低惯性的问题,从而极大地提高了微网系统的稳定性[7]。文献[8]中提出的VSG技术采用有惯性的下垂控制,通过有功功率与无功功率解耦,分别设置有功下垂系数和无功下垂系数,但是均为对逆变器传输阻抗进行补偿的设计问题。
为使VSG技术更广泛地应用于低压微电网,提出一种改进的虚拟同步发电机控制策略。该策略在现有的VSG控制策略基础上,通过对逆变器输出功率进行虚拟坐标变换,并在考虑馈线支路阻抗差异的基础上,加入虚拟电阻补偿,实现了不同馈线阻抗下并联系统的稳定运行以及各微源逆变器功率的精确分配和无环流输出。
1 改进的VSG等效模型
1.1 LC型的VSG并网系统
LC型的VSG并网系统等效电路图如图1所示。
图1中:e为VSG的内电势;Ug为电网公共交流母线电压;L和C为VSG输出滤波电容和电感;Lg和Rg为并网线路的馈线电感和电阻。
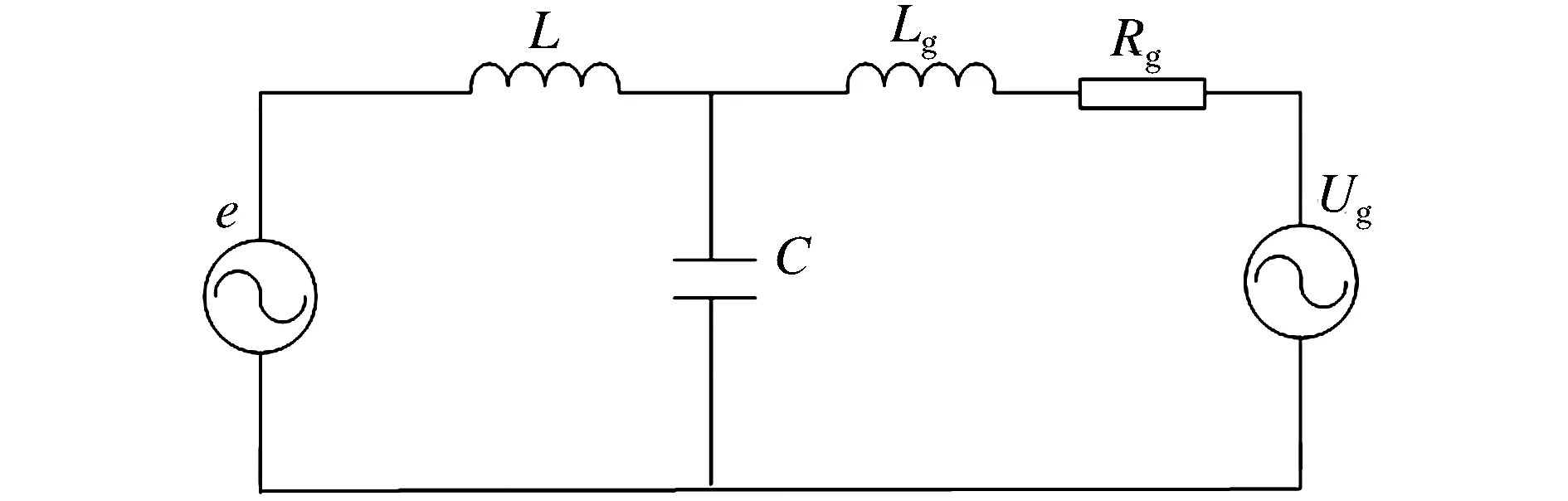
图1 LC型的VSG并网系统等效电路图
1.2 改进的LC型的VSG并网系统
改进的VSG等效模型如图2所示,将模型按同步发电机的内部结构进行物理等效,图中逆变器输出电压uioabc为改进VSG的内电势,δi为内电势对应的功角;LC滤波器、并网线路的馈线阻抗和隔离变压器漏感的阻抗值中阻性分量为电枢电阻R,感性分量为同步电感L;upccabc为公共交流母线电压,改进的VSG的端电压;uivabc为加入虚拟电阻Riv补偿后改进VSG的等效内电势。
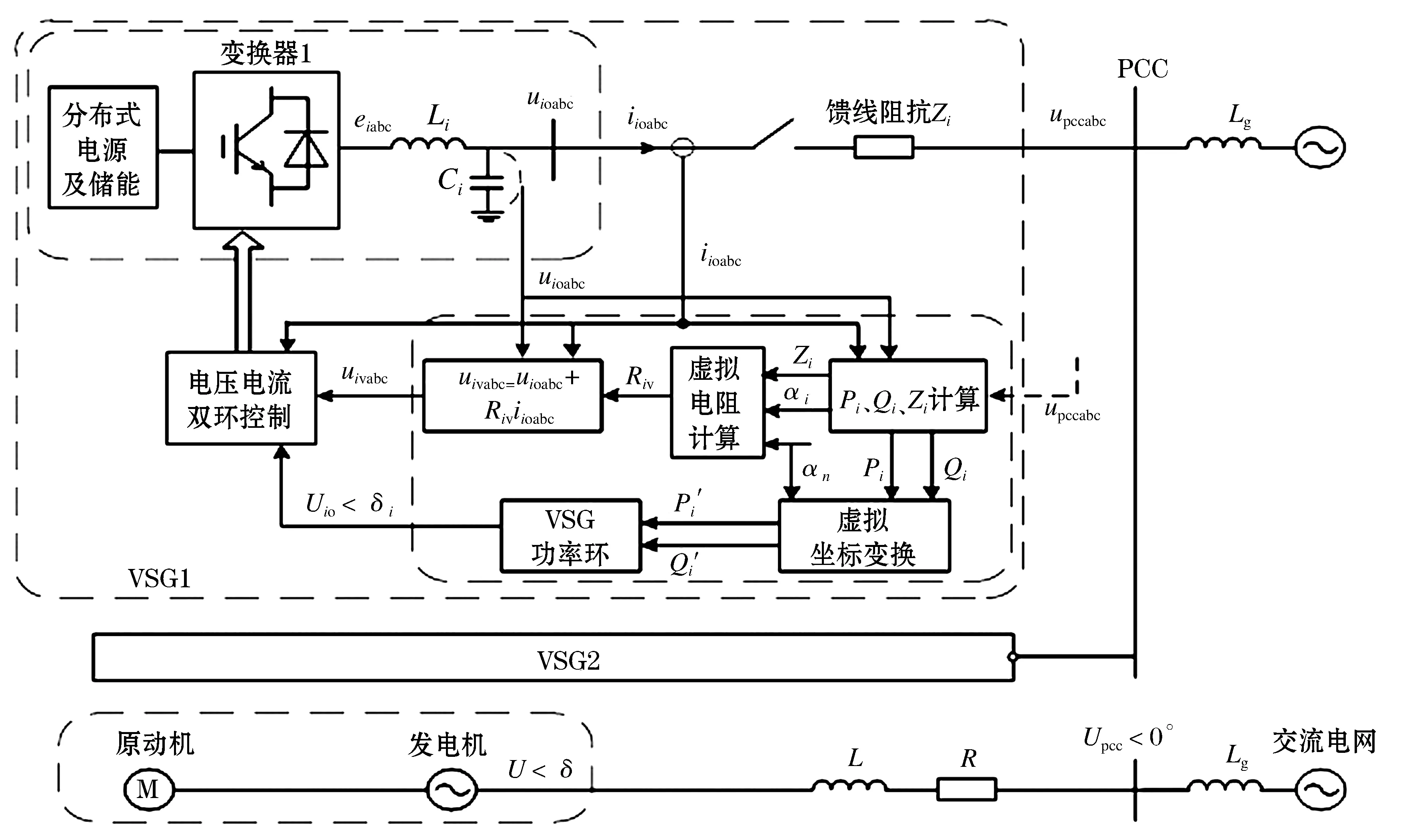
图2 改进的VSG并联到无穷大系统等效模型
该等效方式下,改进的VSG技术的功率控制和电流电压双环控制可以独立设计。VSG输出功率Pi、Qi的功率环控制时,可以通过下垂技术调节VSG内电势uivabc的频率和幅值,只需考虑馈线阻抗。设计电压电流双环时仅需考虑LC滤波的影响。
2 VSG控制策略
2.1 虚拟坐标变换下垂控制
低压微电网中,馈线阻抗中阻性分量较大,可以采用虚拟坐标变换下垂控制[5],有功功率和无功功率的解耦变换如式(1)和式(2)所示:
(1)
(2)
式中:αi(i=1,2)为逆变器i的馈线阻抗角;Pi、Qi为VSG输出的有功功率和无功功率。
有功环和无功环下垂控制方程如式(3)所示:
(3)
式中:Dip、Diq分别为有功环下垂系数和无功环下垂系数;ω和ωn为逆变器并联系统的输出角频率和额定角频率;Uio、Un分别为输出的实际电压和额定电压。
虚拟坐标变换下垂控制可实现逆变器传输的有功和无功功率的解耦控制。当多台微源逆变器并联运行时,只有逆变器的馈线阻抗角相同且幅值与所连接逆变器容量成反比才能实现功率的精确分配和无环流输出。
2.2 虚拟电阻控制
在多台改进的VSG并联系统中,由于馈线中包含隔离变压器和不同Upcc点接入负荷的差异导致馈线阻抗的阻抗角和幅值不同,为实现功率的精确分配则需要进入虚拟电阻。虚拟电阻补偿方法可以等效为在馈线中串联了电阻,通过虚拟电阻来补偿馈线阻抗的阻抗角,使得等效馈线阻抗具有相同的阻抗角。
等效馈线阻抗Zi(Zi=Ri+jXi),其中Ri为阻性分量,Xi为感性分量,等效馈线阻抗角可以根据系统对有源阻尼的要求灵活设置。设定各台改进的VSG具有相同的等效馈线阻抗角αn,则需要串入的虚拟电阻阻值为
Riv=Xicotαn-Ri
(4)
由于实际系统中馈线阻抗可能会因负荷发生变化,串入虚拟电阻也得随着馈线阻抗的变化实时调整。可以通过通信采集的Upcc幅值和相位以及逆变器本地的电压电流信息计算出馈线阻抗Zi。
馈线阻抗Zi具体可由方程式(5)~(7)求出:
(5)
(6)
(7)
式中:δi为Uio与Upcc的相位差。
式(6)、(7)所描述的馈线电压相量如图3所示。

图3 馈线的电压相量图
实际运行的系统中,负载功率因数和负荷不是时刻变化,虚拟电阻动态调整没必要自适应适时调整。采集Upcc幅值和相位的通信延时不影响Zi的准确获取电压和功率的调节,也能克服虚拟电阻引起Upcc点电压降低的问题。计算出Zi后,再按式(6)计算出Upcc,然后再作为无功环的一次调压标准电压。所以提出的改进VSG控制策略对通信的实时性要求不高。
3 仿真实验结果与分析
3.1 仿真结果与分析
基于Matlab/Simulink搭建包括2台改进的VSG和3个负载的仿真模型。3个负载(load1、load2、load3)的功率分别为:3 kW;6 kW;3 kW/3 kvar。为验证控制策略的有效性,馈线阻抗Z1、Z2分别设置为偏阻性、偏感性,仿真参数如表1所示。仿真设置为:初始时刻load1和load2投入运行,0.2 s时刻load3投入,0.4 s时刻load2切出,0.6 s时刻load2再次切入,0.8 s时刻load3切出。仿真结果如图4~6所示。
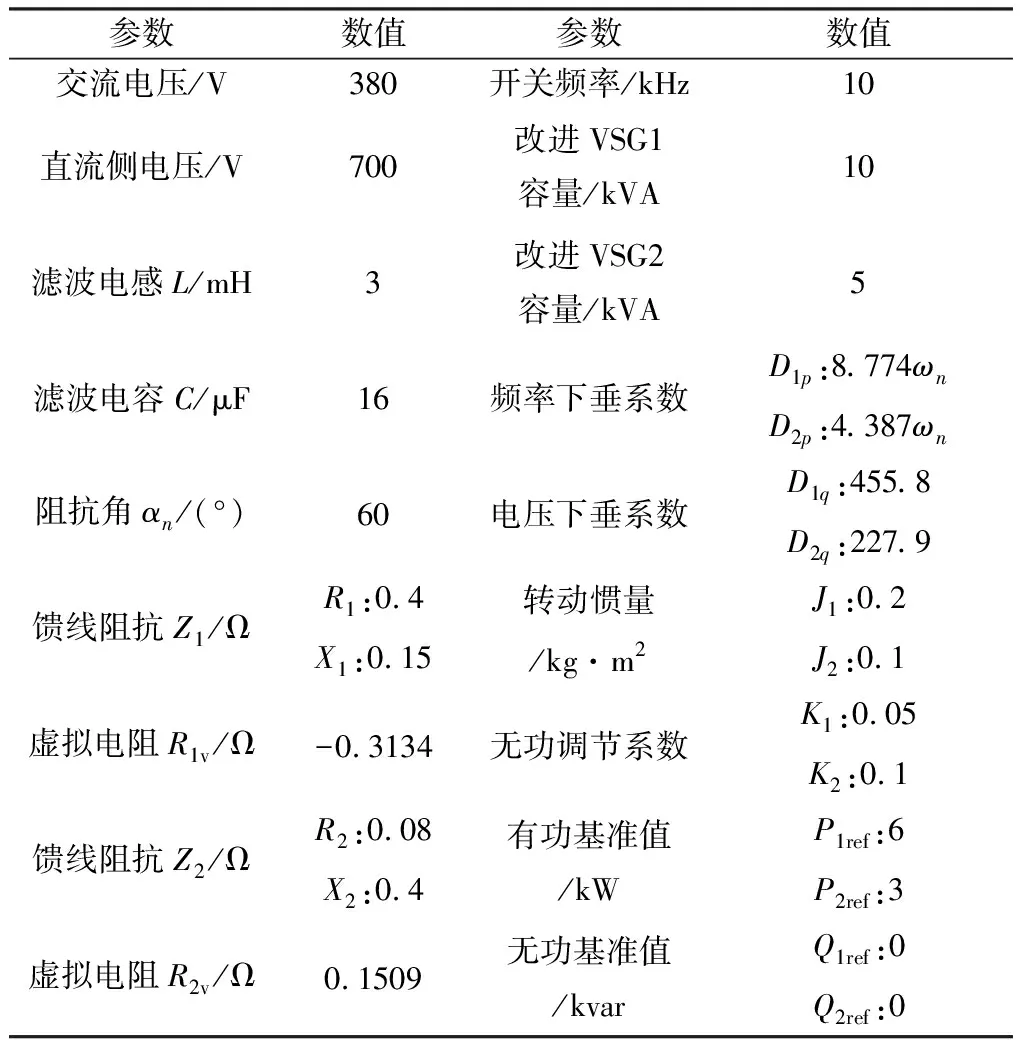
表1 微电网仿真参数Table 1 Microgrid simulation parameters
由图4可知,在负载突增、突减和负载功率因数变化时,所提控制策略可以实现交流母线电压的稳定控制,电压的动态过程持续时间均为4个周波;在负载突增的动态过程中(0.2 s和0.6 s处),三相电压有效值平滑过渡到新的稳定值;在负载突减的动态过程中(0.4 s和0.8 s处),三相电压有效值分别经不同的波动也过渡到新的稳定值;在0.4 s处的电压幅值波动较大,但仍在标准要求范围内。
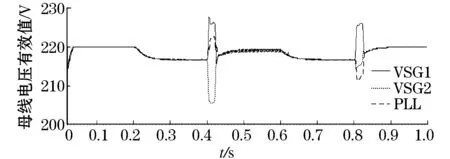
图4 三相交流母线电压有效值Uapcc、Ubpcc、Ucpcc
由图5可知,2台改进的VSG可以快速地实现电网频率的准确锁定,频率突变的动态响应过程平滑,振荡幅度较小,因而改进的VSG可以有效地模拟同步发电机的惯性和阻尼特性。

图5 2台改进VSG的输出频率和锁相环检测的微电网频率
图6为采用瞬时功率方法得到的2台改进VSG输出的有功和无功功率,可知改进VSG输出功率的变化也具有一定惯性。此外,在VSG虚拟电阻补偿控制下,并联系统能够很快到达稳态状态且功率波动很小,2台改进VSG的输出功率能精确分配,并联系统无基波环流。

图6 2台改进VSG输出的有功功率和无功功率
由图4~6可得,在负载有功功率变化时(0.4 s和0.6 s处),微电网的频率和电压幅值均会改变,这表明功率和电压频率、幅值的调节存在耦合,进而表明控制策略中功率虚拟坐标变换的必要性和有效性。
3.2 实验结果与分析
在容量为10 kVA的VSG实验平台上进行实验验证,实验参数见表2。VSG功率阶跃时Upcc点电压和电流变化如图7所示。
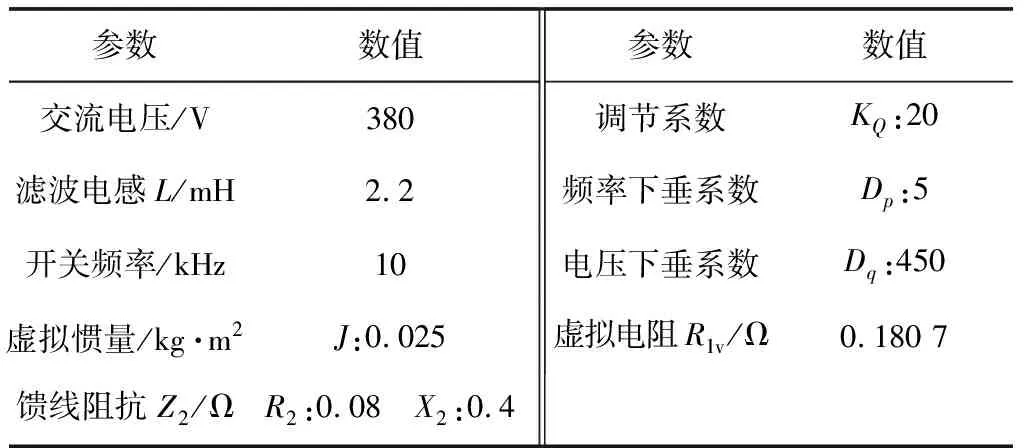
表2 实验参数Table 2 Experimental parameter
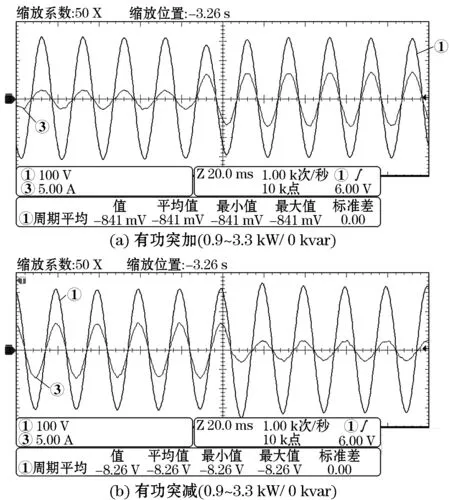
图7 VSG功率阶跃时Upcc点电压和电流变化
由图7可知,VSG能够快速响应负载的突变,有功突变的动态过程约为1个工频周波,该控制策略可以满足负荷突变时稳定运行。
4 结 语
针对虚拟同步发电机技术及其在低压微电网微源逆变器并联系统中的应用进行了研究,考虑馈线阻抗的影响,提出了改进虚拟电阻补偿的VSG控制策略,最后通过仿真和实验验证了所提控制策略的准确性和有效性。所提的改进VSG等效模型和控制策略具有以下特点:
1)该控制策略虽然需通信采集交流母线电压的幅值和相位来计算馈线阻抗,进而计算出实时的母线电压幅值和改进VSG的输出功率作为微源逆变器本地的控制信号,但其对通信快速性要求不高,并且通过计算来获取馈线阻抗避免了馈线阻抗测量困难的缺点,同时使得无功的精确分配易于实现。
2)该控制策略通过对改进VSG的输出功率进行虚拟坐标变换来实现功率的解耦;通过虚拟电阻补偿使得等效馈线阻抗具有相同的阻抗角,并且等效馈线阻抗角可以根据系统对阻尼的要求灵活设置。这两点改进可以保证馈线阻抗差异下并联系统的稳定运行以及各微源逆变器之间无环流输出。
猜你喜欢
振动与冲击(2022年22期)2022-12-01
装备维修技术(2022年7期)2022-07-01
卫星电视与宽带多媒体(2022年10期)2022-07-01
电力自动化设备(2022年4期)2022-04-14
中学生数理化·中考版(2021年10期)2021-11-22
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
电子制作(2017年7期)2017-06-05
