自适应卡尔曼对储能锂电池充放电状态的估算
2021-06-17 07:56王顺利于春梅
自动化仪表 2021年5期
宋 琴,王顺利,于春梅
(1.西南科技大学信息工程学院,四川 绵阳 621010;2.绵阳市产品质量监督检验所国家电器安全质量监督检验中心,四川 绵阳 621000;3.四川华泰电气股份有限公司,四川 遂宁 629000)
0 引言
工业时代,锂电池已成为了当前新能源汽车的主要动力来源[1]。卡尔曼滤波(Kalman filter,KF)算法以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型[2],建立模型的状态方程和观测方程,推导出状态变量和观测变量之间的关系[3],并采用前一时刻的估计值和当前时刻的观测值来更新状态变量[4]。但是,在采样过程中,未知噪声干扰采样信号[5]。自适应卡尔曼滤波(adaptive Kalman algorithm,AKF)在采用测量数据进行滤波时,会不断地由滤波本身判断系统的动态变化[6-7],对模型参数和噪声统计特性进行估计和修正,以此改进滤波设计、缩小实际误差[8-9]。在恒流放电工况下进行仿真验证,采用1 C倍率的恒定电流对锂电池进行完全放电试验,并由混合动力脉冲能力特性(hybrid pulse power characteristic,HPPC)试验得到电池工作状态的内部参数[10]。
1 理论分析
1.1 等效电路模型
Thevenin等效电路模型如图1所示。

图1 Thevenin等效电路模型
在锂电池的芯片系统(system on a chip,SOC)估计过程中,电池等效模型的建立起着重要的作用。Rint模型包括理想电压源和电池内阻,没有考虑电池的极化特性,而电池在进行过放电和循环放电的过程中,会进行大电流放电产生电池极化,由此估算的SOC值精度会比较低。锂电池的荷电状态受温度、充放电状态、自放电、老化等因素的影响,内部化学反应多变,其特性又呈高度非线性。这些特点使SOC估计变得困难。比较常用的SOC估计方法有很多。其中:安时积分法(ampere hour,AH)的误差较大;开路电压法主要用于离线估计;高精度的SOC估计方法有神经网络法、模糊推理法、卡尔曼滤波法等。卡尔曼滤波法是最优化自回归数据处理算法,通过对状态变量进行实时最优的估计,能够提高SOC估计的精度。而扩展卡尔曼对非线性函数的泰勒展开式进行一阶线性化处理,把剩余的高阶项忽略,从而把非线性问题转化为线性问题,从而将卡尔曼线性滤波算法应用于非线性系统中。鉴于以上分析,选择Thevenin模型。相较于新一代汽车伙伴计划(partnership for a new generation of vehicles,PNGV)、非线性(general non-liner,GNL)等模型,Thevenin模型结构简单,属于非线性低阶模型,涉及参数较少,且精度能达到工程应用的要求。在这基础上,充分考虑了极化现象同时对电压和SOC本身的影响,进而建立非线性状态空间方程,再对SOC进行估计。
图1中:用直流电压源Uo来表示开路电压,用R表示欧姆内阻,用极化内阻R1和极化电容C1并联表示锂电池发生的极化现象,用I表示充放电的电流。通过HPPC试验计算此模型的参数。
欧姆内阻计算式如(1)所示:
(1)
时间常数为:
(2)
极化电阻为:
(3)
极化电容为:
(4)
1.2 自适应卡尔曼滤波法
自适应卡尔曼滤波法是在测量的同时,不断地通过误差协方差修正锂电池SOC的当前值,起到自适应调节的作用。通过对系统噪声协方差,以及误差协方差进行实时更新,从而有效地修正当前的估计值。不断地由滤波本身去判断系统的动态是否有变化,对模型参数和噪声统计特性进行估计和修正,以改进滤波设计,进而缩小滤波的实际误差。该种滤波方法将系统辨识与滤波估计有机地结合为一体。AKF 算法在卡尔曼滤波的基础上增加了一个对噪声统计特性的估计。通过测量数据yk对噪声的均值qk、rk和方差Qk、Rk进行实时估计,再根据实时更新的均值和方差修正当前的状态估计值,以提高算法精度、规避发散现象。在线性卡尔曼滤波器中,过程噪声Wk和Vk测量噪声均值为零,定义Wk、Vk如式(5)所示。
Wk~N(qk,Qk)Vk~N(rk,Rk)
(5)
式中:k为离散时间。
试验设计的系统噪声估计器相关量的计算式如式(6)~式(9)所示:
(6)

APk+1AT)GT
(7)
(8)
(9)
式中:“∧”表示该统计量为估计量;xk为系统在k时刻的状态;yk为对应状态的观测信号;uk为系统的输入量;A为状态转移矩阵;B为系统控制矩阵;C为观测矩阵;G=(ГГT)ГT,Г 为噪声驱动矩阵。
式(6)~式(9)均为算术平均,(k+1)-1为每一项的加权系数。
在时变系统中,新近数据对系统的影响较大,因此采用指数加权法对估计器进行一定的改进,在式(6)~式(9)中,每个公式均乘以一个不同的指数加权系数β。β满足的表达式如式(10)所示。
βi=βi-1b
(10)

可进一步得到如式(11)所示的表达式。
(11)
式中:b为遗忘因子,i=0,1,2,...,k。
把原估计器中每项的(k+1)-1替换成βk-1,便得到改进后的时变系统的噪声估计要求。在线性卡尔曼滤波器基础上设计的自适应卡尔曼滤波器的具体步骤如下。
(12)
②统计(k+1)时刻的状态和误差协方差矩阵,如式(13)、式(14)所示:
(13)
(14)
③根据上一步得到的当前状态的误差协方差,计算卡尔曼增益LK,如式(15)所示:
(15)
④据系统的观测值yk+1,对下个时刻的状态估计值和误差协方差矩阵进行更新,如式(16)和式(17)所示:
(16)
Pk+1 | k=(E-LkC)Pk+1 |
(17)
式中:E为单位矩阵。
对rk、qk、Qk和Rk进行相应更新,再返回到步骤①,继续进行迭代计算,直到满足要求。
自适应卡尔曼滤波法的工作原理是:确定初始状态的误差协方差矩阵,对下一个时刻的误差协方差矩阵进行更新;再根据当前的误差协方差计算当前的卡尔曼增益,采用计算的增益再对下一个时刻的状态估计值和误差协方差进行估计。
AKF算法流程如图2所示。

图2 AKF算法流程图
采用试验分析中的HPPC试验步骤,将试验获得的电压、电流数据导入MATLAB工作平台,对估算模型进行分析,得到动态测试应力(dynamic stress test,DTS)工况下的估算SOC。将试验过程中的电池参数电压、容量和电流经过数学分析,计算得到算法的误差值。
2 试验结果分析
自适应卡尔曼的Simulink 模型如图3所示。
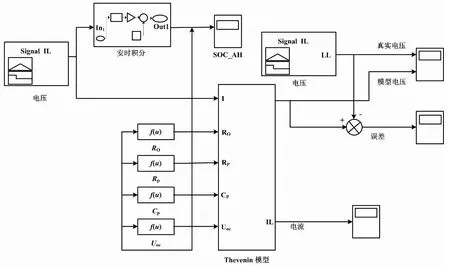
图3 自适应卡尔曼的Simulink 模型
①以1 C的放电倍率进行间歇性放电,根据设定的放电倍率和所需关系坐标点的数量,设定每次循环放电的时间,得到10个关系坐标点。所以每次放电时间为6 min。每次放电结束后搁置1 h,使电池内部的化学状态稳定得到开路电压,得到SOC-OCV的曲线关系。
②HPPC方法表现出电池电压随电池充电和放电条件的变化,反映了电池在实际操作期间的动态特性。可以根据HPPC测试中轻松确定Thevenin等效电路模型的各项所需的关键参数。HPPC测试主要通过充电、放电开始和结束时的瞬间电池端电压的动态改变,检测电池内部欧姆电阻值,并在充电和放电之后通过电池端电压缓慢的变化,检测并求取内部极化电阻和极化容量值。具体的试验步骤如下。
首先,对电池进行充电操作,以1/3 C恒定电流,对锂电电池充电,充电的截止电压为3.65 V。当电压充到3.65 V时,继续以3.65 V的恒定电压充电。当电池的电流减小到0.05 C的时候停止。此时,电池已经充满,为使电压稳定应该搁置电池1 h。然后,以1 C放电10 s,静置40 s,再以0.75 C充电10 s,在循环测试中,让锂离子电池在等间隔SOC点进行动力脉冲测试。测试选取的SOC值是0~1的等间隔的点,相邻脉冲测试之间电池需要搁置1 h,使电池恢复到电化学平衡和热平衡状态。
2.1 试验数据
根据上述试验步骤,对锂离子电池进行HPPC测试。不同SOC阶段的欧姆内阻R、极化内阻R1、极化电容C1开路电压E计算如表1所示。

表1 不同SOC状态下的模型参数
通过Thevenin模型建立的非线性空间方程和根据混合脉冲的充放电试验,得到0~1的SOC采样点和对应的实际的电池内阻、极化电容和极化电阻的真实值。
根据前文构建的、基于AKF的锂电池SOC估计模型,在MATLAB/SIUMLINK建立仿真模型。拟在多种工况试验条件下,对模型的估算精度、估算过程中的收敛性以及对于真实数据的跟踪性进行研究,验证AKF算法在SOC初始值不为1.0时的收敛效果。
2.2 恒流放电试验
将锂离子电池以1 C倍率恒流放电,每次放电结束搁置40 min后电池的化学反应与热效应达到平衡。此时,电池电压就是与当前SOC所对应的OCV值。
从试验数据中提取这些离散的点,得到OCV-SOC关系曲线如图4所示。

图4 OCV-SOC关系变化曲线
2.3 HPPC试验
根据上述混合脉冲功率特性试验分析,不同SOC的采样点电压变化曲线如图5所示。
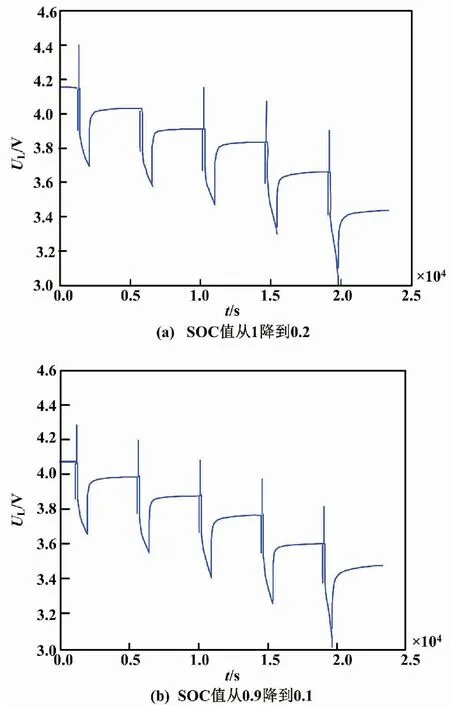
图5 不同SOC的采样点电压变化曲线
锂电池SOC每降低0.1,便进行一次HPPC充放电试验。如此可获得不同SOC状态下电池的动态响应特性。根据动力锂电池在工作过程中不同的SOC值,可以得到电池内部的各个参数变化。
从原始数据中抽出所有的电压数据,描绘出HPPC测试试验整个过程中的锂离子电池端电压变化情况。
从每次恒流放电结束搁置1 h的电压曲线可以看出,电池电压在放电结束后经过长时间的搁置会逐渐趋于平稳,表示电池的内部化学反应和热效应基本达到平衡,所以可以得到开路电压和SOC的关系曲线。
2.4 DST工况试验
分别运用AH、扩展卡尔曼滤波(extended Kalman filter,EKF)和无迹卡尔曼滤波(unscented Kalman filter,UKF)方法对锂电池的SOC进行估计。根据以有的试验数据和结论表明:在这三种方法中,估算初期AH积分法无法快速收敛跟踪真实有效的SOC值。其估算误差远远大于EKF以及UKF,且随着估算时间的加长,误差越来越大。这是误差在长时间累积的结果。EKF以及UKF算法都能够跟踪到真实SOC值,并且在估算后期误差稳定。同时,相比较EKF,UKF能够更快速地收敛跟踪到真实值,并且后期估算误差小于EKF。估算误差维持在2%以内。不同算法比较如图6所示。

图6 不同算法比较图
验证初始值不为1时,自适应卡尔曼的收敛效果更好。恒流放电下SOC估算及估算误差如图7所示。
从图7中可以看出,自适应卡尔曼滤波能够跟踪真实、有效的SOC值,并且效果很好。通过MATLAB绘出AKF的误差曲线,计算得到AKF的误差值。

图7 恒流放电下SOC估算及估算误差
由试验数据可分析出各个算法对工作状态中动力锂电池的SOC估算的精确值。DST测试下,AH、EKF以及UKF对SOC的估算误差如表2所示。
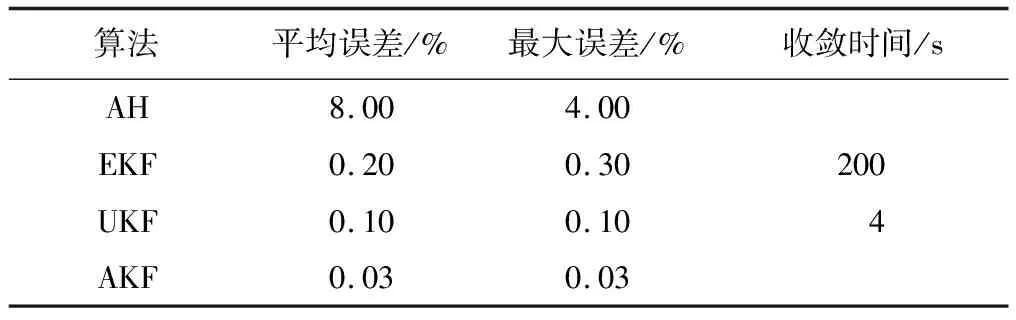
表2 DST测试下AH、EKF以及UKF对SOC的估算误差
通过对比实际的值和由自适应卡尔曼滤波法估算的SOC值,明显地观察到预测值可以完美跟随真实值,并把误差范围收敛到0.03%。对比其他几种SOC的估算方法,AKF能更有效地跟踪复杂工况下锂电池的荷电状态。
3 结论
电池内阻是参数识别的一个非常重要的方面。混合脉冲特性试验有方便的测量方法,充放电电池电压瞬间的变化可以采用欧姆定律,也可以通过时域关系检测出电池的内部参数。二阶RC的Thevenin模型考虑了电池的稳态和瞬态特性。它是一种非线性低阶模型,涉及的参数更少,精度更高。对比分析实际的SOC值和预测的SOC值,发现在自适应卡尔曼的误差范围小于扩展卡尔曼的误差范围。在电池管理系统的采样过程中,即使是采样信号受到外界的干扰,当这些干扰在在硬件滤波基础上加以自适应卡尔曼滤波,能够降低成本和更易于实现。通过测量数据实时估计荷电状态的动态变化,可修正噪声的统计特性。通过试验数据分析表明,自适应卡尔曼滤波可以将误差范围控制在0.03%以内。
猜你喜欢
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
电源技术(2016年9期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
电子设计工程(2014年6期)2014-02-27