平面一级倒立摆系统的研究与设计
2021-06-17 07:12:22张凌宇王世宇高越吕清松
电子制作 2021年5期
张凌宇,王世宇,高越,吕清松
(苏州城市学院,江苏苏州,215104)
0 引言
摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆两大类。其中,倒立摆是一个典型的非线性、高阶次、强耦合、不稳定、欠驱动系统。对倒立摆的控制涉及到控制科学中处理非线性、高阶次、强耦合对象的关键技术,实现了倒立摆的高品质控制,就解决了控制领域中的难题。
按照基座的运动形式,倒立摆主要分为直线倒立摆、环形倒立摆和平面倒立摆三大类。目前,直线型倒立摆作为一种实验仪器以其结构相对简单、形象直观等优点,广泛运用于实验教学等环节。环形倒立摆的基座运动形式与直线倒立摆有所差异,但二者相同之处是基座仅有一个自由度。
相比之下,平面倒立摆是倒立系统中最复杂的一类,其非线性、耦合性、多变量等特性更加突出。目前,关于平面倒立摆系统的稳定控制研究相对较少。因此,本文主要开展平面一级倒立摆系统的研究与设计工作。
1 平面一级倒立摆的数学建模
对平面一级倒立摆的结构做简化处理,假设摆杆是匀质的,且忽略摩擦力的条件下,平面一级倒立摆可以被抽象为由基座小车质量块和均匀摆杆组成的刚体运动系统,并建立如图1所示的全局坐标系OXYZ。
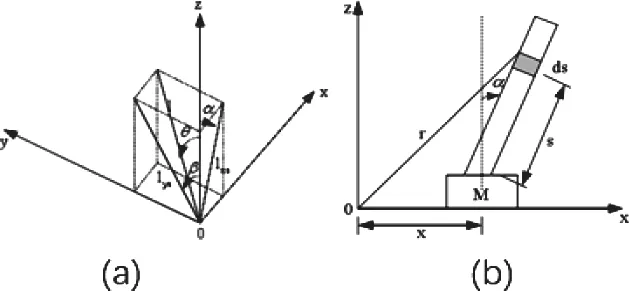
图1
图1 (a)中,l为倒立摆摆杆长度,lxz,lyz分别是摆杆在x-z,y-z平面的映射长度,θ为摆杆与z轴方向的夹角,α,β分别为摆杆在x-z,y-z平面的映射与z轴方向的夹角。可得:

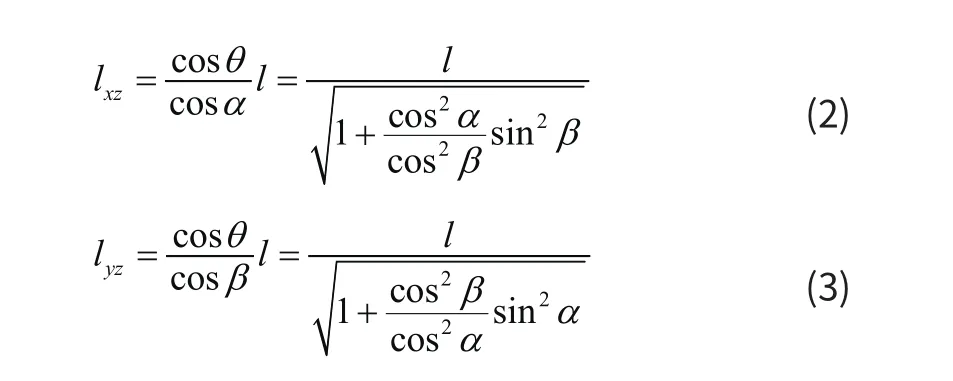
在摆杆垂直向上的平衡位置时可近似认为lxz,lyz≈l。根据坐标定义,只考虑x-z平面内情况,如图1(b)所示。
采用拉格朗日动力学建立平面倒立摆的数学模型,有拉格朗日方程及为拉格朗日算子可知倒立摆系统的动能T和势能V 分别可以通过下列方程组进行计算:
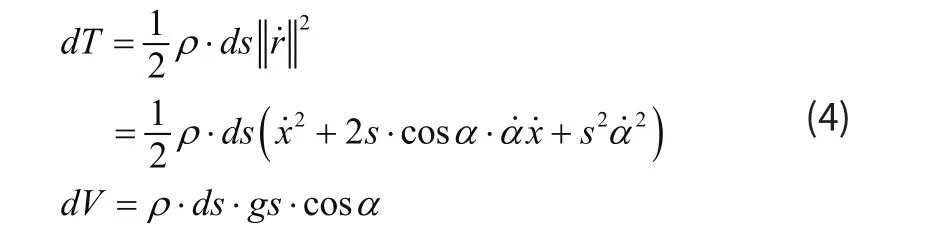
根据式(4),可得倒立摆系统的动能和势能分别为:

结合式(5),并整理可得如下方程组:
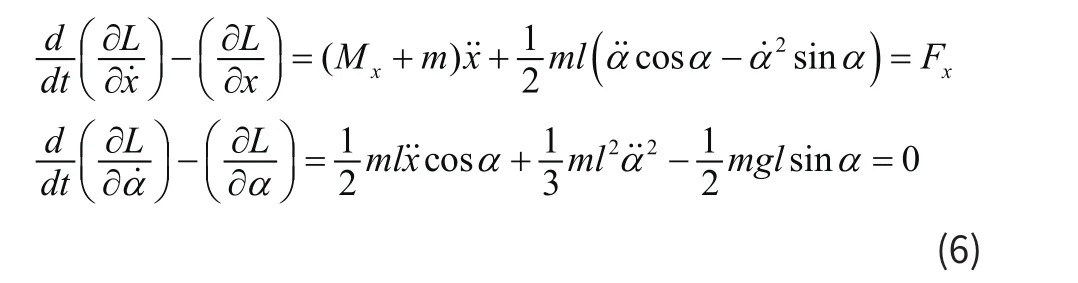
由此可见,平面一级倒立摆系统在垂直向上的平衡位置附近进行近似处理后,摆杆在互相垂直的两个方向上是非耦合的。因此,在X、Y两个方向可以分别设计控制器,而不必担心两个方向上的互相干扰的问题。
2 系统硬件设计
如图2所示,系统主要分为三个部分:机械硬件单元、电机驱动单元和控制单元。
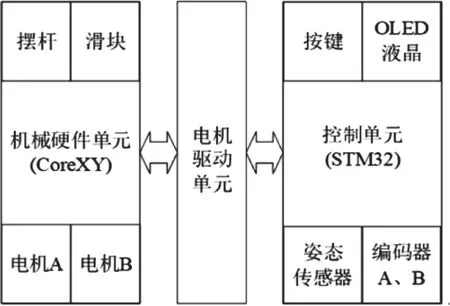
图2
机械硬件单元主体采用CoreXY结构,通过两个直流减速电机来控制滑块在XOY平面内的自由移动。同时,滑块上端通过万向节与摆杆底座相连接,并将姿态传感器(MPU6050)紧贴于底座,以获取摆杆的实时姿态信息;电机驱动单元主要实现两路直流电机的驱动和正/反转控制,并为控制单元供电;控制单元选用STM32F1系列控制器,通过姿态传感器和两路电机的编码器信号获取摆杆的实时倾角信息以及相对位置信息。
■2.1 机械硬件单元
相较于仅具有一个控制维度的直线倒立摆,平面倒立摆增加了一个控制维度,因此具有更大的控制难度。为了减少执行电机数目,系统设计过程中采用CoreXY结构,以减少执行电机数目,具体结构如图3所示。
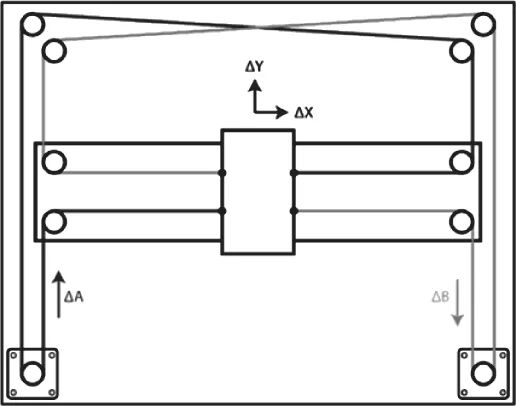
图3
如图3所示,设∆X、∆Y分别为滑块在X和Y方向的位移,∆A、∆B分别为电机A与电机B的线位移,则有:
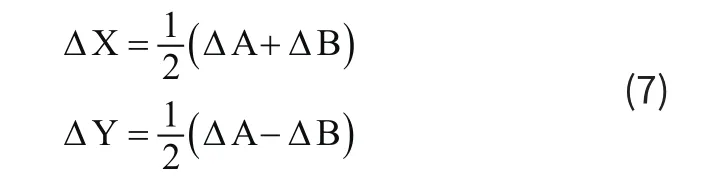
由式(7)可得:

因此,仅用两个电机和传送带的耦合,就可以控制中心滑块向平面内各个方向的自由移动,从而降低了系统的控制难度。
■2.2 电机驱动单元
电机驱动单元主要采用由两片BTN7971B构成的H桥电路来控制电机转动。相较于由MOS管组成的H桥电路,其更为简单,且占用面积小,便于PCB布局。此外,其内置限流保护电路,可有效保护电路。具体硬件电路,如图4所示。
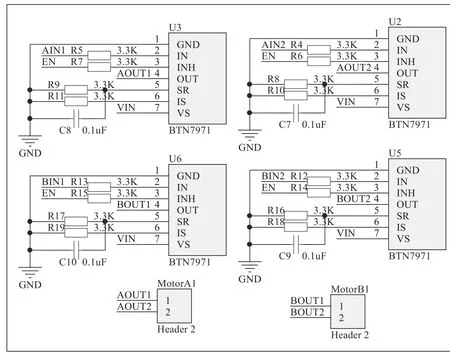
图4
同时,为了避免感性负载(电机)产生的反向倒灌电流烧毁微控制器,设计中选用缓冲芯片74LS244来实现微控制器与驱动电路间的隔离。
控制单元选用STM32F1系列控制器,通过姿态传感器和两路电机的编码器信号获取摆杆的实时倾角信息以及相对位置信息,并将采集到的上述信息通过OLED进行显示。
(1)姿态传感器
姿态传感器选用6轴传感器模块MPU6050,其结合了3轴陀螺仪和一个3轴加速度计,工作电压为2.4V~3.5V。MPU6050作为整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。
(2)OLED液晶
OLED具备轻薄、省电、使用寿命高等特性,以及许多LCD不可比拟的优势。本设计使用的OLED显示模块,采用SPI通信协议,并带有相关接口,只需要占用微控制器的4个IO口,就能达到显示效果。
3 系统程序设计
为了实现倒立摆摆杆的稳定控制,在Keil MDK5集成开发环境上完成了系统的程序开发。系统程序流程图,如图5所示。

图5
如图5(a)所示,系统上电后,首先对微控制器(串口、中断、定时器、IIC等)、编码器、电机、MPU6050以及OLED液晶进行初始化,然后进入定时器中断,在中断中实现相应检测控制功能。定时器中断的程序流程,如图5(b)所示。首先,微处理器读取MPU6050采集到的摆杆倾角信息,并通过两路编码器读取滑块的相对位置信息;然后,微处理器根据所获得的实时信息,计算保持摆杆平衡所需的滑块位移,并将其转换为相应的电机的控制信号,从而控制滑块向相应方向进行移动,达到保持摆杆平衡的目的。
其中,MPU6050初始化的程序流程,如图6所示。
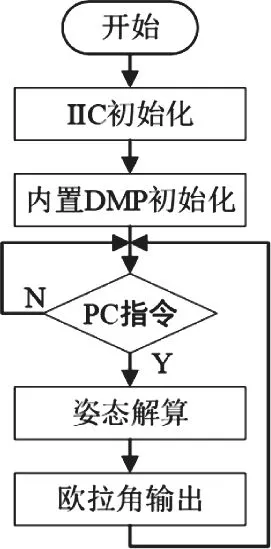
图6
如图6所示,MPU6050的初始化过程主要完成陀螺仪、加速度传感器的量程、采样速率设置、内置DMP使能,以及原始数据采集、数据滤波、原始姿态四元数解算、滤波数据融合、姿态角输出等任务。
4 系统测试
在完成系统机械结构和硬件电路设计的基础上,经过反复调试,最终完成了系统样机的制作。样机实物,如图7所示。
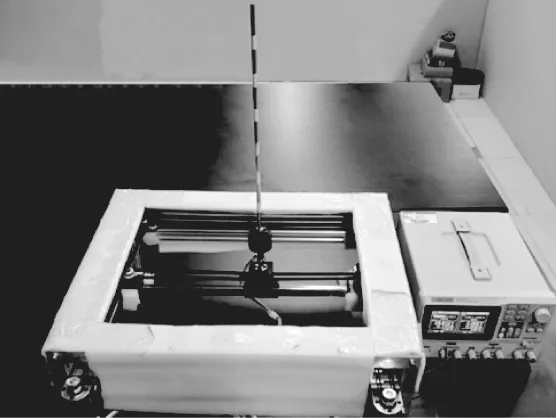
图7
在实现平面倒立摆系统的基本功能后,对所设计倒立摆系统的抗冲击能力进行了测试。
具体测试过程中,采用24V开关电源为整个系统供电,用玩具枪来模拟外界冲击,并通过平抛运动的思想来测量子弹的出膛速度。随后,采用控制变量法,通过依次改变子弹重量、射击距离以及冲击位置,最终测得了该倒立摆系统所能承受的最大冲量距。与此同时,对于相同冲量距情况下的冲击效果进行了多次测量,测试结果表1所示,表明:相同冲量距情况下的冲击测试结果基本相同,从而验证了冲量距这一物理概念。

表1 测试结果
5 结语
对于平面倒立摆系统的稳定控制研究具有巨大的应用价值。本文在建立平面一级倒立摆系统数学模型的基础上,完成了系统机械结构和硬件电路的设计,实现了对摆杆姿态的实时、稳定控制。同时,相关测试结果表明,所设计的平面一级倒立摆系统具有良好的稳定性和鲁棒性,具有一定的应用价值。
猜你喜欢
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
学生天地(2020年3期)2020-08-25 09:04:16
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
现代机械(2018年5期)2018-11-13 10:06:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
河南科技(2014年3期)2014-02-27 14:05:55