以物联网打造的铁路货车检修智慧物流系统关键技术研究
2021-06-17 08:19雷晓丽
电子制作 2021年10期
雷晓丽
(神华铁路装备有限责任公司教育培训中心(技能鉴定站),内蒙古包头, 014060)
0 引言
在铁路货车车辆检修中,货车车型多样且检修要求不一,而车辆检修设备设施相对固定,不能达到自动化的智能维修效果,因此需要一条能满足不同车型检修需求的生产线。该生产线需同时考虑物料供应的复杂性、生产线状态的不断切换、严格的物料需求时限,加之有限、及时的库存补给,才能保证检修作业流畅进行。
近年来,随着铁路车辆自动化数字化技术的广泛应用,货车运行过程中产生大量的安全质量监测数据,这些数据对货车检修决策有着重要意义;同时,货车检修现场智能化设备的不断增加,为更好地利用智能化工装感知货车检修现场动态提供了便利条件。
物联网作为一种新兴的集多种先进技术为一体的智能化网络,它将传感设备与互联网建立有效连接,打造信息高速通道,实现对物品和过程的智能化感知、识别和管理。将物联网技术运用于货车检修物流系统中,凭借其广泛的信息采集和分析能力对货车检修进行可视化管理,准确掌握货车部件配送区域、物料配送时机,使得物料配送、供应更加精准,从而使货车检修更加高效化、智能化[1]。
1 需求分析和建设目标
随着科学技术的进步和货车检修需求的提高,铁路相关利益方对铁路货车检修效率有了更高的期待和要求,迫切需要在货车检修过程中采取智能化、自动化物流系统,解决传统的人工作业在运输效率、经济效益、安全保障等方面的问题。近几年,随着铁路车辆全生命周期数字化管理的逐步实施,铁路货车历史运行、维修数据实现了可实时查询,但在货车检修过程中,对该数据的智能化利用还存在一些问题,主要是在检修现场的某些环节和整体规划上,未实现全过程的数据采集分析和现场状态的全面感知和管控。货车检修智慧物流系统重大需求分析示意图见图1。
为了进一步满足铁路货车检修高效率要求和适应铁路货车维修系统自动化智能化快速发展的趋势,有必要建立以物联网打造的货车检修智慧物流系统,其具体建设目标如下:
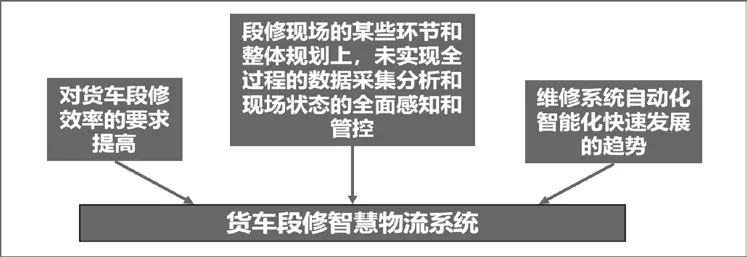
图1 货车段修智慧物流系统重大需求分析示意图
(1)将无线射频读取识别、图像识别校对、物联网等一系列技术应用于货车检修过程,实现货车检修物流自动化、智能化;
(2)构建覆盖货车检修过程各环节管理的物联网系统,帮助管理者洞察现场动态,为货车检修管理提供新手段;
(3)在智能运输调度管理系统的合理调度下,实现货车检修现场各设备的自动化、智能化统一管理,降低货车检修过程中设备对传统人工管理的依赖;
(4)构建货车检修物联网感知数据资源库,建立以物联网为基础的货车检修监控与智能分析系统,实现配件、物料智能运输调度,打造满足“智慧工厂”内在需求的货车检修智慧物流系统,解决货车检修运输效率、经济效益、安全保障等方面的问题。
2 系统构架
根据铁道部发布的《铁路货车段修规程》(铁运〔2012〕202号),货车段修需先完成车牌识别,而后基于识别结果,对待修货车进行拆解、清洁、测量、探伤、维修、组装等一系列处理,最终通过跑合实验验证货车段修结果,其具体流程示意图如图2所示。
基于该流程,对货车检修物流系统自动化、智能化关键技术进行研究,并引入物联网技术,提出以物联网为基础打造的货车检修智慧物流系统。
以物联网为基础构建货车检修智慧物流系统的关键包括云、管、端3个部分。云是物联网的大脑,是物联网数据处理的核心,利用云计算平台为物联网提供数据分析、存储、计算,甚至是远程控制和决策;管是联系终端与云端的重要通道,目前有无线射频识别、图像识别与校对、MEMS感知技术、信息智能处理技术、互联网等接入方式;端是物联网的感知触角,是物联网的主要数据来源,根据现场应用场景的不同,终端形态也各不相同,为降低终端入云的门槛,通过提供SDK等方式屏蔽底层物联网终端的多样性。

图2 货车段修车间区域划分及段修流程示意图
以物联网为基础打造的货车检修智慧物流系统的技术架构分为感知层、网络层和应用层,具体如图3所示。
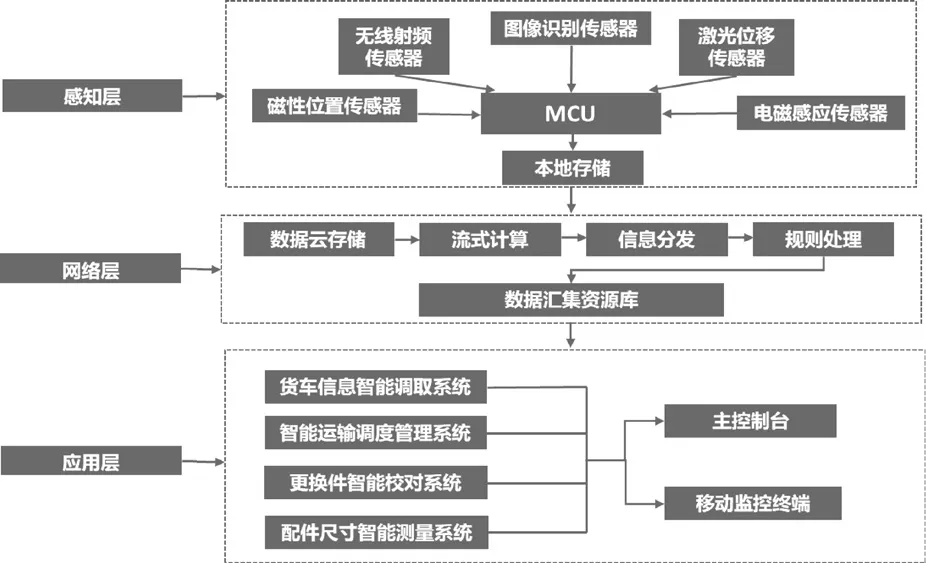
图3 系统架构
感知层即各种终端设备层,通过无线射频传感器、图像识别传感器、激光位移传感器等智能终端设备采集各类信息,并通过内置MCU处理信息,储存在本地数据库。
网络层负责数据解析,实现数据云存储、流式计算、信息分发和规则处理,形成数据汇集资源库。
在对数据采集、处理的基础上,形成应用层。根据功能划分,货车检修智慧物流系统的应用层包括货车信息智能调取系统、智能运输调度管理系统、更换件智能校对系统和配件尺寸智能测量系统,并可通过移动监控终端与主控制台进行访问。
3 货车检修智慧物流系统感知层设计
在货车检修过程中,感知层是启动智慧物流系统运行的关键所在。本文所提出的以物联网打造的货车检修智慧物流系统的感知层主要承担车牌识别、配件运送、尺寸测量、零件校对与补给的功能。
■3.1 基于无线射频技术的车牌识别
不同货车车型所对应的拆解方式不同,而且货车零部件维修环节还要综合考虑修程修规、历史开行情况等因素,因此,首先需要使用无线射频技术对货车车牌进行识别,掌握待修货车车型及其历史开行情况,为后续段修环节提供数据基础。
无线射频识别(Radio Frcyuency Identification,RFID)也称为射频识别技术,这是一种利用电磁波的反射能量进行通信的新兴自动识别技术。该技术可归入短距离无线通信技术,与其他短距离无线通信技术(如WLAN、蓝牙及ZigBee)相比最大的区别在于无线射频识别的被动工作模式,即利用反射能量进行通信。
射频识别技术采用大规模集成电路计算、电子识别、计算机通信等技术,由RFID标签、读写器、天线、数据传输及处理系统组成,通过读写器和安装于载体上的RFID标签,实现对载体的非接触识别和数据信息交换。具有方便快捷、识别速度快、数据容量大、使用寿命长、标签数据可动态更改等特点,且具有更好的安全性和动态实时通信能力。
货车检修车牌识别中,使用被动射频RFID系统,其原理如图4所示。

图4 车牌识别RFID工作原理
当货车的RFID电子标签接近读写器模块时,读写器将发射微波查询信号,电子标签收到读写器的查询信号后,会将此信号与标签中的数据信息合为一体反射回读写器,反射回的微波合成信号,已带有电子标签上的货车相关数据信息,读写器接收到标签返回的微波信号,经读写器内部微处理器处理后可将标签内储存的货车车型、历史开行情况等信息读取出来。
■3.2 基于AGV自动运输系统的物料运输
在货车检修过程中,对智能化搬运需求不断增加,除了检修各环节的部件运送外,还需承担仓储中心与维修区域的零件补给。通过对AGV自动运输系统的使用,能够达到无人化、自动化搬运的效果,提高相应的工作效率[2]。
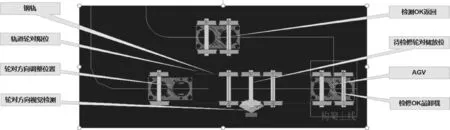
图5 以轮对运输为例的AGV自动运输工作流程
AGV自动运输系统主要利用机械原理以及机械设计的专业知识研制AGV小车,取代传统人工运输物料的方式,从而实现物料的无人搬运。AGV小车一般由底盘、车身、动力装置、控制系统等组成。在车体前后还装有急停按钮,车体四周均布置有接触式安全传感器,通过导电橡胶形变,产生通断信号,从而控制车体,车体对角上装有两个激光区域扫描安全传感器,三级预警输出,且安全区域可任意设置。
以轮对运输为例,AGV自动运输系统工作流程如图5所示。
首先,将拆卸下来的待检测轮对滚动至“待检修轮对储放位”;在轨道侧面安装一摄像头,用于监测轮对侧面文字来判断轮对朝向,并上传系统;基于系统识别结果自动调整轮对方向,由AGV小车运输至目的地;AGV将测试OK品运抵“检修OK品卸载位”后,再返回 “待检修轮对储放位”搬运其它组轮对。
■3.3 基于激光传感器的尺寸测量
尺寸测量是货车检修过程中必不可少的一个环节,其测量结果直接影响着维修环节相关决策的实施。使用激光位移传感器对货车配件尺寸进行测量,可准确高效的获取货车磨耗件的磨损情况,实现货车配件尺寸测量的自动化与智能化。
激光位移传感器是利用激光技术进行测量的传感器。它由激光器、激光检测器和测量电路组成。激光传感器是新型测量仪表。能够精确非接触测量被测物体的位置、位移等变化。
按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法。激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量。在货车段修过程中,尺寸测量环节对配件测量精度有较高要求,激光三角测量法更能满足货车段修测量需求。
■3.4 基于图像识别的更换件校对
在货车配件进行维修时,基于货车规程修规、损伤情况等因素,需对货车某些零部件进行更换,此时需AGV小车从仓储中心调取所需配件,为了防止配件拿取时出现错漏情况,在配件出库时可采用图像识别技术对更换件进行识别校对[3]。
图像识别包括图像获取、图像预处理、特征提取和目标识别。在获取图像后,可先对图像噪声、对比度等进行预处理,而后提取图像相关特征,并根据提取的特征完成识别。目标识别常用的方法有模板匹配、基于遗传算法方法和基于神经网络方法。
在货车检修过程中,更换零配件的种类、类型固定,可实现货车检修更换件图像数据库的构建,进而满足基于模板匹配的图像识别和基于神经网络的图像识别的技术需求。但考虑到调取更换件时,配件在AGV小车上放置的位置是随机的,为了解决特征提取与匹配的适应性问题,基于神经网络的图像识别技术更满足货车段修更换件校对需求。
4 货车检修智慧物流系统网络层设计
货车检修智慧物流系统的网络层是连接感知层和应用层的纽带环节,实现远程监控和分析,保证数据的安全性和易用性,通过应用层的灵活组织,使各级管理者实时掌握现场动态,提高货车检修项目管理能力和信息共享能力。
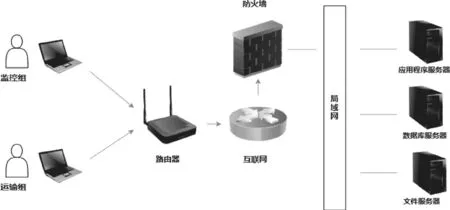
图6 网络系统部署
以物联网打造的货车检修智慧物流系统的网络系统部署包括加密传输、鉴权验证、流式处理、队列缓冲、数据存储、数据服务等。感知层采集存储的数据经本地数据库服务器传输至局域网时,进行接口的认证检验和数据的安全校验,然后按照平台内置规则进行流式计算和数据判识处理,经计算后将数据放置于消息队列中进行后续的数据存储,并将数据类型通过元数据进行统一规范,确保数据的共享和联合分析。后续应用层的监控、运输系统可通过网络数据接口对该数据进行访问,获取所需信息。
5 货车检修智慧物流系统应用层设计
在货车检修智慧物流系统中,基于感知层与网络层对数据获取与处理后,再综合考虑货车检修流程,最终根据功能所需构建货车信息智能调取系统、智能运输调度管理系统、更换件智能校对系统和配件尺寸智能测量系统,完成货车检修智慧物流系统应用层的设计搭建,具体流程如图7所示,并可通过移动监控终端与主控制台对各个系统进行访问。
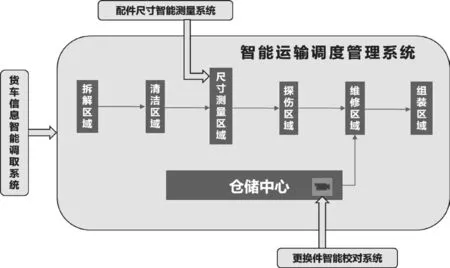
图7 应用层系统流程图
货车信息智能调取系统是采用无线射频技术进行车牌识别从而获取待修货车信息的系统。该系统通过货车的RFID电子标签获取待修货车历史开行情况、历史维修情况数据、待修货车车型及对应修程修规数据,而后将获取的数据进行整理,作为智能运输调度管理系统的输入之一,对货车拆解方式、零部件维修更换有着重要影响[4]。
智能运输调度管理系统是一个同时对多台AGV实行中央监管、控制和调度的系统,包括对AGV小车进行任务发布,对AGV小车进行交通管制,对AGV小车运动状态进行采集等。调度管理系统借助通讯系统把AGV和监控与智能分析系统紧密联系在一起,实时采集和汇总小车的数据,通过计算分析,以监控与智能分析系统为指导,协调调度轮轴智能输送AGV,进行运输线路上的全自动输送。智能运输调度管理系统的优化与AGV数量、工作路径等多方面因素有关,具体的优化方案需要根据现场实际作业情况而定。合理的调度优化设计可以避免AGV小车在运输线路之间发生碰撞,提高货车配件、更换件的运输效率。系统提供工位呼叫功能,通过客户自有的智能运输调度管理系统进行物料需求管理,进一步可根据机台消耗速率进行调度。智能运输调度管理系统流程具体如图8所示。
更换件智能校对系统是基于图像识别技术对货车更换配件种类和数目进行校对的系统。当货车某零部件需要更换时,智能运输调度管理系统将对AGV小车发送从仓储中心调取更换补给件的命令,为了防止在调取零部件时出现漏取、错取的情况,需在补给件出库时对其进行校对。更换件智能校对系统以AGV小车调取的更换件的图像作为输入,基于货车段修更换件图像数据库对图像物品进行识别,若AGV小车所取更换件正确,则出库运送,否则在仓储中心返回重新拿取更换件。

图8 智能运输调度管理系统流程图
配件尺寸智能测量系统采用激光位移传感器对货车零部件进行尺寸测量,尤其是对货车磨耗件进行测量。该系统的感知设备布置于尺寸测量区域,其测量结果将伴随被测部件至维修环节,该结果是此零件在维修环节的更换、维修的依据之一。
6 总结与展望
结合铁路车辆智能运维的发展趋势和货车段修自动化智能化发展需求,开展以物联网为基础打造的货车段修智慧物流系统关键技术研究,形成以下结论:
(1)分析国内外发展形势和货车检修自动化智能化发展需求,提出以物联网为基础打造的货车检修智慧物流系统及其建设目标,实现更便捷的设备接入和更全面的现场感知,为货车段修管理提供决策依据;;
(2)提出以物联网为基础打造的货车检修智慧物流系统的整体架构、设备架构和功能架构,详细描述了系统功能组成;
(3)对以物联网为基础打造的货车检修智慧物流系统关键技术进行分析,建立货车信息智能调取系统、智能运输调度管理系统、更换件智能校对系统和配件尺寸智能测量系统,并可通过主控制台和移动监控终端实现智能运输调度系统的实时访问,解决货车段修运输效率、经济效益、安全保障等方面的问题,打造满足“智慧工厂”内在需求的货车段修智慧物流系统。
未来,随着货车检修智慧物流系统的更新与成熟,可以迁移到铁路的其它领域,对这些领域进行移动机器人的研制以及相关智能化系统的开发,替代传统的天车或人工作业的方式,促进了企业技术进步,提高了企业的形象和自动化生产水平,有效地解放了劳动生产力,对提升机车的专业化检修水平、促进铁路装备制造业的创新发展具有重要意义[5]。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
计算机与数字工程(2022年7期)2022-08-26
北京航空航天大学学报(2022年5期)2022-06-06
南方农业·下旬(2022年4期)2022-05-24
电子乐园·上旬刊(2021年7期)2021-07-19
汽车世界·车辆工程技术(下)(2019年6期)2019-10-21
数学大王·低年级(2019年12期)2019-08-14
当代工人(2019年13期)2019-08-05
当代工人(2019年24期)2019-01-17
为了孩子(孕0~3岁)(2001年14期)2001-08-07