
基于机器视觉的车灯模组照度智能监测方法
2021-06-16 23:49:58卢印举张伟豪张智华赵星万艺菡
电子制作 2021年6期
卢印举,张伟豪,张智华,赵星,万艺菡
(郑州工程技术学院信息工程学院,河南郑州,450044)
0 引言
汽车的车灯照度的相关配置,会影响驾驶员的视线,进而影响到驾驶员的生命安全。根据国际车灯模具照度标准,不同的车型应由指定的光型构成,因此如何确保汽车照度满足国家车辆生产标准将成为未来相关产业的研究重点[1]。但目前国内车灯生产厂家的车灯检测系统的照度监测精度不足以满足现实使用需求[2],为此,在对车灯模组照度的智能监测中,引入机器视觉技术。希望通过本文对此课题的研究,在确保车辆驾驶员人身安全的同时,提高汽车照灯的生产标准,以此为产业的相关研究提出技术层面指导。
1 机器视觉技术的应用
机器视觉技术是利用计算机设备对人类视觉进行模拟,使获取事物的信息更为客观化。在完成数据提取的基础上,使用计算机辅助监测行为,对数据信息加以处理,从而发挥信息的最高应用价值。机器视觉技术应用于各行各业,如机械智能化生产、汽车制造生产、印刷行业、医疗产业等,充分发挥出自动化程度高、精度高、速度快、支持大批量信息且可实现远程终端管理等优势[3]。其常规化工作流程如图1所示。
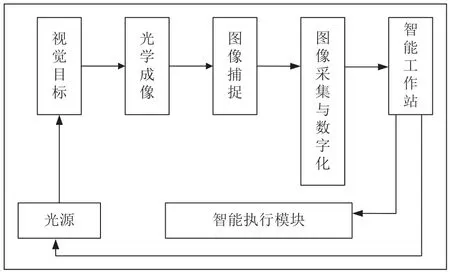
图1 机器视觉技术的应用流程
综合机器视觉技术具备的显著优势,将此技术应用于车灯模具照度监测研究中。
2 基于机器视觉的车灯模组照度智能监测方法
■2.1 基于机器视觉车灯模组照度边缘提取
传统的车灯模具照度智能监测行为中,由于可实现的监测距离较短,并且其中应用了过多的微分计算,导致监测时必然会受到外界多种噪声或干扰因素的影响。为了避免在对照度进行智能监测中将噪声识别为监测点,本章引入机器视觉技术,对车灯模组照度图像的边缘信息进行提取[4]。可将边缘信息的提取过程划分为边缘数据的定位与残缺信息的修补两个步骤。此过程中考虑到车灯模具光照强度受到的外界干扰源较多,因此利用机器视觉提供的图像模式识别技术,进行信息算子的卷积处理。由于Sobel 算子信息只有水平与垂直两个维度,为了保证对光照强度边缘信息采集的有效性,在获取工业化相机拍摄的图像后,应拓展信息的传输模板(通常情况下为8 个方向的模板),并将图像中的每一个边缘点进行模板卷积对照。输出模板不同方向的最大值,记录边缘值的对照方向,并将此信息传输到上位机。
为了确保获取的照度图像在传输中的稳定性,因此本文选择将以太网作为信息传输与实时通信的支撑,完成对车灯模组照度边缘图像的有效传输[5]。由于不同类型的车灯磨具在生产中的工艺与标准不同,为此获取的边缘图像信息中可能存在部分无用信息,包括环境噪声等。为了方便后续对光照强度的准确识别,利用计算机科学技术,在图像边缘上寻找每一边,边缘线中存在的孤立点与端点,将这些点作为修补信息的初始点,用于提高获取信息的质量。在修补图像信息的过程中,根据车灯模具的轮廓,对其进行思维跟踪。综合上述分析,采用机器视觉提供的多种功能,对获取边缘图像进行修补与平滑处理,此过程可用如下计算公式表示。

式中,wx,y表示为完成修补与平滑的边缘图像结果,其中x 与y 分别表示横向与纵向信息;q表示为信息传输模板;i 与j 分别表示为模板中信息的对照方向;d()⋅表示为使用机器处理后的边缘信息;K表示为车灯模具相关参数。根据上述计算公式,完成对车灯模组照度边缘信息提取,得到去除相关干扰噪声的照度信息。
■2.2 亚像素照度边缘曲线拟合
结合机器视觉技术,完成对车灯模组照度边缘提取后,对亚像素照度边缘曲线进行拟合。利用逐步查询方法,完成对其相应照度边缘的匹配,记录两组图像当中的相对位移变化情况。通常情况下,可选择左右跨度分别为1.2 个像素的图像,将其与样本子区域对应位置进行相关计算,在计算过程中,保证包含10 个亚像素目标子区域。结合相关系数计算的特性,当分布在真实匹配范围内的目标子区域,与样本子区域之间的相关系数具备如下规律:当距离真实点越远时,则其相关系数的数值越小;当距离真实点越近时,则其相关系数的数值越大。在一组相关系数当中,以真实匹配点作为区域中心点,进行二次曲线分布。选取多个亚像素目标区域和样本子区域的相关系数,完成二次曲线拟合,再对其进行导数求解,得出曲线的最大值,将通过计算得出的最大值所在区域点作为匹配点。
在确保其精度满足拟合要求的情况下,降低运算的次数,并选择其中五个较为合理的匹配点拟合二次曲线。进一步推导出亚像素照度边缘相应的一阶导函数:

式中,y1、y2分别为根据最小二乘法推导出的拟合曲线系数;A 表示为拟合曲线坐标。根据相应的二次导函数,通过其正负值,判断其最大值和最小值。由于相关系数的分布具有一定的特殊性,通常情况下曲线图像均包含最大值,而不包含最小值。因此,满足B'(A) >0 条件。根据上述计算结果求得亚像素点的目标子区域相对应的距离值,完成对亚像素照度边缘曲线拟合。
■2.3 车灯模组照度自动化监测
利用Mfiso48 计算机编程工具,对车灯模组照度进行自动化监测,设置其照度边缘曲线拟合数据以异步串口通信方式进行传输,波特频率为1600bps。通过多个数据串口完成对其照度参数的接收,以及对上述照度边缘曲线的提取。在显示屏幕当中通过点击照度按钮,将程序中对照度监控的窗口打开,并在上位机显示器当中对当前车灯模组照度的状态进行实时检测,并同时对其相应的元件闭合或断开状态进行检查。根据其相应的传输数据,在SMT 控制端当中发送相应的监测质量,等待上位机的反馈信息。若上位机中显示的B'(A) 数值小于或等于零,则说明其照度不满足运行要求,需要重新设置新的控制指令。若上位机中显示的B'(A) 数值大于零,则说明车灯模组的照度满足运行要求,可继续通过该控制指令对其照度进行控制。
3 对比实验
■3.1 实验准备
构建实例分析,实验对象选取某车灯模组。针对其照度进行智能监测。本次实验硬件设施包括:型号为MKLOPA25835890 的上位机。此次实验环境设置的具体内容及参数为:任务最大迭代次数为200,任务布置器2,虚拟主机资源数量860,任务资源消耗量30,物理主机地理距离20,宿主更新0.2569,网络权重系数0.3575。
在保证实验具有有效性的前提下,选择同一个测试指标进行,实验的内容为测试本文监测方法与传统监测方法之间的照度智能监测查准率。照度智能监测查准率能够表明监测信号中所监测得出的有效信息在信息总量中的占比,照度智能监测查准率越高证明该监测方法对于车灯模组照度智能监测精度越高。在此次的实验中,首先使用本文基于机器视觉设计监测方法智能监测车灯模组照度,利用Heapchyer 软件记录测得的照度智能监测查准率,设其为实验组;再使用传统监测方法智能监测车灯模组照度,同样利用Heapchyer 软件记录测得的照度智能监测查准率,设其为对照组。本次实验将监测距离设为5m~50m,以每5m 为一个节点,共进行10 次实验。针对Heapchyer 软件测得的照度智能监测查准率,记录实验结果。
■3.2 实验结果与分析
在上述设计的实验环境中执行此次实验,并输出对应的实验结果,整理其内容如表1 所示。

表1 实验结果对比表
通过表1 可知,在相同的监测距离内,本文设计方法在对车灯模组照度进行智能监测过程中,其监测结果的准确率平均达到了98.12%,明显高于对照组的监测准确率,平均为86%。基于上述实验结果数据,得出本次实验的最终结论:相比传统的智能监测方法,本文设计的基于机器视觉的车灯模组照度智能监测方法实际应用中,效果更为显著,因此可以说明所设计的智能监测方法更具有现实推广价值。
4 结束语
为了解决传统智能监测方法存在的查准率低的问题,本文基于机器视觉技术的应用,从提取车灯模组照度边缘信息、拟合亚像素照度边缘曲线与自动化监测三个方面,开展了车灯模组照度智能监测方法的设计。并采用设计对比实验的方式,对本文提出方法进行了验证。
猜你喜欢
华人时刊(2019年13期)2019-11-26 00:54:38
电子制作(2019年12期)2019-07-16 08:45:20
光源与照明(2019年4期)2019-05-20 09:18:24
电子测试(2018年9期)2018-06-26 06:45:40
电子制作(2018年8期)2018-06-26 06:43:10
电子测试(2017年11期)2017-12-15 08:57:38
重庆文理学院学报(社会科学版)(2017年2期)2017-05-03 03:18:43
铁道通信信号(2016年5期)2016-06-01 12:10:20
汽车科技(2014年6期)2014-03-11 17:46:25
液晶与显示(2014年3期)2014-02-28 21:14:32
