应用于红外眼科疾病检测的瞳孔定位算法
2021-06-15 09:10蔡怀宇娄世良陈文光陈晓冬
中国光学 2021年3期
蔡怀宇,史 玉 ,娄世良,汪 毅,陈文光,陈晓冬
(1. 天津大学 精密仪器与光电子工程学院 光电信息技术教育部重点实验室,天津 300072;2. 上海美沃精密仪器股份有限公司,上海 200237)
1 引 言
目前,全球范围内视觉健康问题严峻[1]:视力损伤或失明人数高达22亿人以上,其中至少10亿人的视力损伤问题本可预防或尚待解决。有效的眼科疾病检测对眼部疾病的预防和治疗具有重要作用。临床常用的眼科疾病检测仪器,如:光学相干层析成像仪(Optical Coherence Tomography,OCT)[2-4]、眼底相机[5-6]等在检测之前,首先需要将仪器成像光轴对准瞳孔中心点,以保证光源发出的光经瞳孔入射到被检测者眼内。在实际操作中,尽管医护人员可通过手动调整实现对准,但是手动对准对操作者的熟练度和被检测者的配合度均有一定的要求,较为繁琐耗时。因此,自动化人眼对准显得尤为重要[7]。自动化人眼对准装置利用瞳孔定位算法获取瞳孔中心点坐标,进而借助步进电机实现成像光轴与瞳孔中心的对准,具有实时、高效、操作简单等特点。其中,瞳孔定位算法的性能对定位结影响最大,因此研究快速、准确、不受噪声和测量条件(如:局部反射光斑、眼睑眼睫毛遮挡、离焦模糊)影响的瞳孔定位算法具有重要实用价值。
根据识别原理,可将瞳孔定位算法分为基于数据的方法和基于知识的方法[8]。两种方法的根本区别在于瞳孔中心点的判断准则是否需要根据先验知识进行制定。基于数据的方法不依靠先验知识,而是通过对足够数量的样本进行学习,获取人眼特征,完成人眼定位。常用的方法有支持向量机(Support Vector Machine,SVM)[9-11],卷积神经网络(Convolutional Neural Network,CNN)[12-13],AdaBoost(adaptive boosting)[14-17]等。其中,基于Harr特征的AdaBoost人眼检测算法应用较为广泛。该算法利用积分图和级联结构,对一定数量人眼样本的Harr特征进行统计学习,定位人眼区域[17],其能够极大地改善人眼检测方法的定位精度和定位速度。基于数据的方法对图像质量要求不高,但是这类方法需要大量训练样本,训练过程复杂,并且定位结果精度较低,只适用于粗略的人眼定位研究,无法满足红外眼科疾病检测设备的精度要求。
基于知识的方法依据先验知识制定判断准则,指导人眼定位。这种方法的定位结果更为准确,在精确的人眼定位中广泛使用。瞳孔的灰度信息[18-20]、边缘信息[21-24]、形状信息[25-30]是常用的判断准则。Vranceanu等人利用人眼的灰度信息,采用灰度投影函数定位人眼区域[18],该方法计算量小但是定位精度较低。张宏薇等人研究了一种改进的基于Hough变换圆检测的瞳孔识别算法[21],该算法通过限定检测的半径范围,利用Hough变换得到最佳拟合圆,实现瞳孔中心点定位。该算法解决了传统Hough变换算法计算量大、实时性差的问题,但是当图像数据集发生变化时,需要重新设置半径参数,算法的人工依赖度高。Loy等人提出了一种快速径向对称变换算法[25],该算法实质上是对Hough变换的改进,通过将映射空间从参数空间转化为数字图像,有效降低了算法的变换维度,解决了Hough变换由于参数空间维度过高造成算法复杂度增加,难以满足实时性的问题。并由Yan等人首次应用到瞳孔中心点的检测中[26],实现了较好的瞳孔定位效果。但是直接利用该算法进行瞳孔中心点检测存在两个不足:算法在大面积范围内搜索,计算成本高;算法的相关参数需要人工设置,自适应性差。
考虑到人眼对红外光感知较弱且红外图像对比度较高,因此,多数眼科疾病检测设备均采用红外相机对瞳孔进行实时监控。在红外眼科疾病检测设备完成了机械头架粗对准和对人眼的轴向调焦后,由于检测过程存在眨眼、晃动等生理现象,导致人眼图像仍会存在离焦模糊现象,这就要求瞳孔定位算法对轻微的离焦模糊具有一定的鲁棒性。另外,因为被检测者之间的个体差异明显以及红外眼科疾病检测设备自动对准成像需求,定位算法还需要具有实时性好,精确度高,鲁棒性强,并且具备自适应性。
综合以上情况,在多种非理性情况下,为了使红外眼科疾病检测设备实现实时高效自动化的人眼定位,本文提出了一种改进的径向对称变换的瞳孔中心点定位算法。首先利用灰度积分投影法融合最大类间方差法对图像进行二值化处理,完成瞳孔区域和冗余信息区域间的粗分割,并结合多团块筛选条件提取出只包含瞳孔的感兴趣区域(ROI),以减小算法全局性大范围搜索成本。然后,根据ROI的最小外接矩形和瞳孔区域间的几何关系,结合灰度级形态学线性滤波,确定搜索半径范围,降低算法的人工依赖度。通过在ROI上运行改进后的径向对称变换算法,有效修正了传统径向对称变换算法计算复杂度高、自适应性差的缺陷,实现了快速、高效的瞳孔中心点定位。该算法在提高定位速度的同时保证了定位精度,对噪声有良好的鲁棒性,可以满足多种红外眼科疾病检测设备的瞳孔定位算法要求,亦可辅助红外眼科疾病检测设备实现人眼结构成像。
2 传统径向对称变换算法
径向对称变换算法是以广义对称变换为基础发展而来的一种基于梯度信息的目标检测算子。该算法根据被检测区域的梯度幅值信息和梯度方向信息构造出评价区域对称性的新指标—径向对称度,再采用投票的方式计算被检测区域中每一点在给定的搜索半径n处的径向对称度。随着搜索半径n的递增,具有径向对称特点的目标区域在对称中心处可以累加到较大的径向对称度,从而完成目标区域的检测。
对于输入图像I中每个点P,都可以在其梯度正负方向上得到正投影点P+ve和负投影点P−ve。正负投影点都在以P为中心、以n为半径的圆上。正投影点P+ve为P点在梯度正方向所指向的点,负投影点P−ve为梯度负方向所指向的点,对应的两点的计算公式为:

其中g表示图像I的梯度矩阵,g(p)表示P点的梯度向量[gx,gy],||g(p)||表示P点的梯度幅值;n表示搜索半径;round表示对所求值进行四舍五入。
根据上述的像素点投影关系,可以通过计算梯度幅值映射矩阵Mn和梯度方向映射矩阵On统计投影点的累加特性,对应的计算公式为:

其中公式(3)表示在梯度方向映射矩阵On中对P点的正负投影点位置分别+1,−1,代表图像中每一点P投影到该点的像素数目;公式(4)表示在梯度幅值映射矩阵Mn中对P点的正负投影点位置分别+||g(p)||, −||g(p)||,代表图像中每一点P在该点处幅值的累加。
为了从梯度的方向信息和幅值信息两方面同时反映图像的径向对称特性,需要计算图像I的径向对称度贡献矩阵Sn,对应的计算公式为:

其中α表示径向控制参数,可以根据不同的需求设定不同的参数值,一般设定α=2;“*”表示卷积;An是二维高斯卷积核,表示对径向对称度贡献矩阵Sn进行高斯滤波,抑制噪声的干扰,核尺寸为标准差为0.1·n。
最后将所有搜索半径下的径向对称度贡献矩阵Sn进行累加平均,计算出最大的径向对称度S[i,j]所对应的坐标,确定对称中心。

可以看出,径向对称变换非常适用于检测对称区域。而在人眼图像中,瞳孔区域具有高度对称性,并且从瞳孔区域到巩膜区域,灰度值有明显的递增性,表明在瞳孔和虹膜的边界处有良好的梯度特性。因此,通过径向对称变换算法可以方便地定位瞳孔中心。但是一般情况下,人眼图像存在大面积的平滑区域及反射光斑区域。其中,平滑区域灰度变化均匀,梯度幅值小,对径向对称度的贡献较小,却会大大增加算法的时间成本。而反射光斑区域和瞳孔区域类似,具有明显的径向对称性,且相比于瞳孔区域,径向对称度更高,会对瞳孔中心点的定位精度产生较大的影响。另外,传统径向对称变换算法的搜索半径范围n需要人工设置,文献[25-29]中,都是测试人员依据经验进行人工设置。然而,人眼的瞳孔大小存在个体差异性,如果测试人员根据经验设置搜索半径范围,可能存在范围设置过大或设置过小的问题,特别是对于瞳孔区域没有采集完整的情况,测试人员可能需要进行多次参数设置。这在很大程度上增加了算法的计算量和人工复杂度,无法满足瞳孔定位算法实时性、自适应性的要求。
3 改进的瞳孔定位算法
本文首先利用灰度积分投影融合最大类间方差的方法对人眼图像进行粗分割,并结合多团块筛选条件提取出只包含瞳孔的ROI,有效避免了算法由于大范围运算导致的计算成本高、易受噪声干扰等问题。然后根据ROI的最小外接矩形和瞳孔区域间的几何关系,结合灰度级形态学线性滤波,完成了半径范围的设置,实现了参数自适应。最后,在设置的搜索半径内对ROI进行最大径向对称度计算,完成瞳孔中心点定位。算法流程如图1所示。
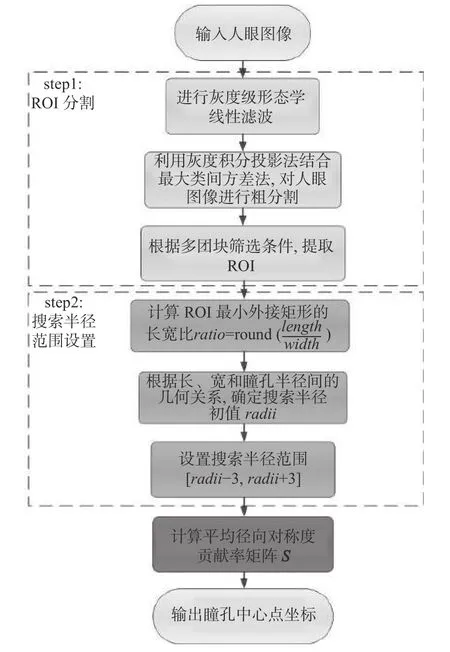
图1 算法总流程图Fig. 1 Flow chart of the improved pupil location algorithm
3.1 ROI分割
为了避免人眼图像中大量冗余信息(如:大面积的平滑区域以及其他具有径向对称特点的区域)对后续定位的影响,需要对人眼图像进行ROI分割,以便提高瞳孔定位的实时性、准确性。考虑到反射光斑主要位于虹膜和巩膜区域,因此本文将瞳孔确定为ROI。
最大类间方差法是一种基于全局的图像分割算法,该算法的优点在于不需要人为设置参数,计算量小。但是如果直接利用该方法分割人眼图像,反射光斑区域往往会作为目标区域被提取出来。这主要是由于反射光斑区域和其他区域间差别较大,导致分割阈值极易受反射光斑影响,造成感兴趣的瞳孔区域提取失败。而灰度积分投影法反映的是图像不同区域的灰度均值情况,因此可以有效确定出反射光斑、虹膜、巩膜等所在区域,从而避免其对分割阈值的影响。为了正确提取ROI,本文首先采用灰度积分投影融合最大类间方差的方法对人眼图像进行粗分割,再利用多团块筛选条件提取出只包含瞳孔的ROI,具体处理过程如下。
利用灰度积分投影法对人眼图像每行、每列的灰度值求和,可以得到竖直、水平投影曲线,分别如图2(a)、2(b)所示。可以看出瞳孔区域的投影值在竖直方向和水平方向上均小于各自投影曲线的平均值。基于此,以水平投影平均值、竖直投影平均值为阈值对原图进行分割,可以去除人眼图像中的部分噪声区域,粗分割结果如图2(c)所示。根据人眼图像灰度特点:瞳孔区域灰度值最低、虹膜次之、巩膜最高,对粗分割图像使用最大类间方差进行二值化,结果如图2(d)所示。
由图2(d)可知,经过灰度积分投影和最大类间方差法处理后,人眼图像中仍然存在多个团块:瞳孔区域所在团块,冗余信息所在团块。其中冗余信息所在团块多由所受光照较暗的眼角区域、灰度值存在陡降变化的虹膜巩膜交界区域形成。在形状上,表现为点状、三角状和呈对角的弧线状,点状团块的面积(所含的像素点数目)小于1 000,与瞳孔区域所在团块的面积相差悬殊。三角状和呈对角的弧线状团块与瞳孔区域所在团块面积相当,但瞳孔团块相对于其最小外接矩形的占有率远大于三角状团块、弧线状团块。各团块的占有率计算公式为:

其中SBlock表示团块的面积,SRectangle表示团块最小外接矩形的面积。

图2 人眼图像ROI分割示意图。(a)竖直投影曲线对照图;(b)水平投影曲线对照图;(c)粗分割图像;(d)二值化图像Fig. 2 Schematic diagram of ROI segmentation of a human eye image. (a) Vertical projection curve contrast diagram; (b) horizontal projection curve contrast diagram; (c) coarse segmentation image; (d)binary image
基于瞳孔和冗余信息所在团块间的数值关系,建立多团块筛选条件,如下:
(1)计算各团块的面积,去除面积小于1 000的团块。
(2)判断团块的个数,如果团块个数等于1,则该团块就是包含瞳孔的团块,继续执行步骤(4)。如果团块个数大于1,则需要进行步骤(3)做进一步的判断。
(3)计算各团块相对于其最小外接矩形的占有率。选择占有率最高的团块做为包含瞳孔的团块,继续执行步骤(4)。
(4)将只包含瞳孔的团块作为蒙版,与人眼图像进行数值运算,获取人眼图像的ROI。
(5)提取ROI的边缘区域,设置算法的梯度阈值th=0.2max(||g(p)||)。仅考虑梯度值高于阈值的像素点的投影关系,忽略ROI平滑区域的贡献。
3.2 搜索半径范围的设置
针对传统径向对称变换算法自适应性差的问题,本文提出对ROI做最小外接矩形结合灰度级形态学线性滤波的方法。应用几何学知识,可以得到ROI最小外接矩形的长、宽和瞳孔半径之间的几何关系,进而基于这一关系设置搜索半径范围。但是当睫毛对人眼存在遮挡时,这种方法便会存在较大误差。睫毛的灰度值与瞳孔相近,ROI的分割结果存在3种情况:只包含瞳孔区域;包含瞳孔和睫毛的连通区域;包含瞳孔被睫毛过度分割区域。在后两种情况中,ROI分割结果受睫毛影响存在提取过多或过少的问题,导致利用几何关系进行参数设置时出现严重误差,进而影响定位精度,结果见图3。
需要标明的是,这一点极其重要,他在一定程度上回应了上一个部分提出的必然性难题。对人类理性来说,因果性存在于时间序列当中,囿于这一点,自由意志才是与上帝预知相矛盾。实际上,神的领域在永恒当中,所以神意根本不像人一样被限定在时间序列。既然“永恒当下”敉平了人类时间的三个向度——过去现在未来,那么因果序列在神意那里便完全失效。这也呼应到前文对神意与命运关系的辨析,整个逻辑显得十分缜密。

图3 受睫毛遮挡的ROI提取示意图。(a)样本1图像;(b)样本1二值化图像;(c)样本1的ROI图像;(d)样本2图像;(e)样本2的二值化图像;(f)样本2的ROI图像,图像源于数据库CASIA-IrisV4Fig. 3 Schematic diagram of ROI extraction when pupil was obscured by eyelashes. (a) Image of sample 1;(b) binarization image of sample 1; (c) ROI image of the sample 1; (d) image of sample 2; (e) binarization image of sample 2; (f) ROI image of sample 2,images are derived from the CASIA-IrisV4 database
为了解决睫毛遮挡对参数设置的影响,本文采用线性灰度级形态学滤波对人眼图像进行处理。灰度级形态学运算是二值形态学运算的扩展,基本操作有腐蚀运算和膨胀运算。人的眼睫毛是线状,且通常分布在±45°范围之内。基于此,设置线性结构元素如图4(a)所示,利用构造的线性结构元素对人眼图像进行腐蚀-膨胀操作。对于ROI图像中包含瞳孔和睫毛连通区域的情况,在人眼图像中表现为睫毛大部分落在虹膜区域内,只有尖部的小部分落在瞳孔区域,如图3(a)所示。这种情况经过膨胀操作后,睫毛区域的每个像素点经过最大值滤波,该点像素值被设置为结构元素区域内的最大值,通常为虹膜区域的像素值。而对于ROI图像中瞳孔被睫毛过度分割的情况,在人眼图像中表现为睫毛大部分都落在瞳孔区域,如图3(d)所示。经过腐蚀操作后,睫毛区域的每个像素点经过最小值滤波,该点像素的值被设置为结构元素区域内的最小值,通常为瞳孔区域的像素值。对人眼图像采用线性灰度级形态学滤波后,ROI只包括瞳孔区域,如图4(b)、4(c)所示。

图4 结合灰度级形态学滤波的ROI提取示意图。(a)线性结构元素;(b)样本1的ROI图像;(c)样本2的ROI图像Fig. 4 Schematic diagram of ROI extraction combined with grayscale morphological filtering. (a) Linear structural element; (b) ROI image of sample 1;(c) ROI image of sample 2
得到去除睫毛干扰的ROI后,采取对ROI做最小外接矩形的方式,设置搜索半径范围。由于人眼图像存在采集不完整的现象,所以ROI的最小外接矩形存在3种情况,如图5所示。

图5 ROI的最小外接矩形示意图Fig. 5 Schematic diagrams of minimum circumscribed rectangles of the ROI
利用几何学知识,通过最小外接矩形的长宽比,确定搜索半径范围。设置搜索半径的规则如下:
令最小外接矩形的长宽比ratio=round,搜索步长为1,搜索半径范围为[radii−3,radii+3]。 当ratio≥0.90时,采集的人眼图像基本完整,如图5(a)所示,当0.50<ratio≤0.90时,采集的人眼图像不完整,但采集的瞳孔区域占整个瞳孔区域的面积超过一半,如图5(b)所示,;当ratio≤0.50时,采集的人眼图像不完整,且采集的瞳孔区域占整个瞳孔区域的面积小于一半,如图5(c)所示,
在设置的搜索半径范围内,计算ROI的径向对称度,可以避免算法进行大面积、大范围的搜索,从而实现快速、高效、自动的瞳孔定位。首先确定合适的搜索半径范围;再计算ROI边缘区域中每个搜索半径下的梯度幅值映射矩阵Mn、梯度方向映射矩阵On以 及径向对称度贡献矩阵Sn。最后对不同搜索半径下的径向对称度贡献矩阵Sn累加求平均,获取最大径向对称度对应的坐标,将其作为瞳孔的中心点坐标并根据不同搜索半径下的最大径向对称度确定瞳孔半径。为了解决瞳孔中心点不在图像采集区域内导致算法失效的情况,本文在使用径向对称变换算法时,对统计投影点累加特性的各个矩阵的四周均进行了最大搜索半径的填充,从而满足算法迭代过程的空间需求。
4 定位实验与结果分析
为了验证本文算法的有效性,利用计算机硬件配置为Intel Core i5-6300HQ CPU,主频为2.3 GHz,4 GB内存,实验平台为MATLAB R2016b进行实验。利用实验室自研的瞳孔自动化对准装置采集人眼图像,实验包括了CCD相机反射像明显、离焦模糊、眼睑睫毛遮挡严重等情况,图像大小为752 pixel×480 pixel,结果如图6(彩图见期刊电子版)所示。图6(a)~6(d)中红色框标注的区域为ROI区域。瞳孔中心定位结果如图6(e)~6(h)所示,其中红色十字(图中和绿色十字重合)表示人工标定的瞳孔中心点(由专家手动标注,取多次标注的平均值),绿色十字表示算法标定的瞳孔中心点,白色圆圈为算法标定的瞳孔边界。从提取的ROI图像来看,灰度积分投影融合最大类间方差方法有效提取出了瞳孔区域,ROI的灰度值范围为[0, 50],边界灰度值范围为[30, 50],满足感兴趣的瞳孔-虹膜边界灰度值范围,为后续定位打下了基础。从定位结果图像来看,本文算法对存在各类噪声的人眼图像的定位结果与人工标定的中心点基本重合,说明本文算法具有较高的定位精度,对噪声有良好的鲁棒性,适用于多种情况下的瞳孔中心点定位。
此外,本文算法考虑了瞳孔中心不在图像采集区域内的定位情况,弥补了目前瞳孔中心定位算法研究的空白。本文算法对于瞳孔区域采集不
完整图像的定位结果如图7(彩图见期刊电子版)所示,由于瞳孔区域没有被完全采集,所以在定位结果图像的四周进行了填充,便于显示算法的标记结果。从图中可以看出,算法对于不完整瞳孔区域边界的标定基本与真实边界吻合,定位精度较高。实验结果显示,本文算法可以对瞳孔区域不小于30%的人眼图像进行定位。

图6 (a)~(d)为瞳孔定位结果图;(e)~(h)为人眼图像定位结果Fig. 6 (a)~(d) Pupil positioning; (e)~(h) localization of human eye

图7 不完整瞳孔区域图像的定位结果图。(a)~(d)人眼图像; (e)~(h)定位结果Fig. 7 Incomplete pupil area image positioning. (a)~(d)Images of human eye; (e)~(h) localization of human eye
为验证本文算法的定位效果,将该算法与同样基于投票思想的利用图像梯度信息的传统径向对称变换算法[26]、基于梯度均值的定位算法[30]进行对比。将3种方法应用于60幅实验室搭建的瞳孔自动化对准装置采集的人眼图像,部分实验图像的对比结果如图8(彩图见期刊电子版)所示。其中,红色十字为人工标记的瞳孔中心点,绿色十字、蓝色十字、黄色十字依次为上述3种算法定位的瞳孔中心点,白色圆圈为算法标定的瞳孔边界。
为了定量比较3种算法性能,使用定位时间和定位误差对人眼图像的定位结果进行量化分析。定位误差反映的是人工标定的瞳孔中心和算法标定的瞳孔中心之间的欧氏距离,其值越小表明算法的定位精度越高。本文考虑到人工标定的平均误差为8.424 pixel,因此设置当算法的定位误差在8 pixel内时,认为算法定位准确。算法对比结果见表1。

图8 3种定位算法结果对比Fig. 8 Comparison of localization results by three different algorithms

表1 3种算法的精确度和实时性比较Tab. 1 Comparison of accuracy and real-time performance of three algorithms
通过比较3种算法的定位结果,可以看出本文算法和基于梯度均值的定位算法确定的瞳孔中心点非常接近人工标定的中心点位置,但是传统径向对称变换算法出现了较大的偏差。这主要是由于图像中除了具有径向对称特点的瞳孔外,还存在反射光斑、眼睑等其他具有径向对称特点的区域,并且这些区域边缘处梯度值高,相比于瞳孔区域,径向对称度贡献更高,从而对瞳孔的定位结果产生影响,导致定位精度降低。而基于梯度均值的定位算法通过后处理,去除了高梯度值区域,有效避免了眼睑、反射光斑等噪声对瞳孔定位的影响。但是算法复杂度较高,实时性不好。
本文采取ROI分割、搜索半径范围设置对传统径向对称变换算法进行了改进,由表1可知,本方法的平均定位时间为0.366 s,平均定位误差为6.318 pixel,与采集的人眼图像的瞳孔区域相比,平均定位误差比例为1.63%。从表1可以看出,相比于传统径向对称变换算法,本文方法的定位精度提高了16倍,定位时间减少了92%,表明本文算法在保证高精度瞳孔定位的同时,具有较高的速度。可以满足眼科应用对于瞳孔定位算法实时性好、鲁棒性强、精确度高并且具有自适应性的要求。
为了进一步验证本文方法的适用性,采用CASIA-IrisV4数据库进行实验。CASIA-IrisV4数据库的图像都是在近红外光照射下或者在合成光照射下采集的,特点是存在睫毛遮挡、瞳孔尺度不一、反射光斑位于瞳孔区域内且有明显对称性,图像大小为320 pixel×280 pixel。选取200张图像进行实验。部分实验结果图像如图9(彩图见期刊电子版)所示。可以看出本文算法对各种情况下的瞳孔都能实现精确定位。而传统径向对称变换算法的定位结果受反射光斑影响明显,这主要是由于该算法在确定对称中心时需要对整幅图像在较大半径范围内进行搜索,而图像中红外照明光源的反射光斑位于瞳孔区域内,且形状表现出明显的对称性,因此反射光斑区域成为算法径向对称度的主要贡献区域,进而导致传统径向对称变换算法定位结果出现较大误差。

图9 3种算法在CASIA-IrisV4数据库的定位结果Fig. 9 Comparison of localization results by three different algorithms in CASIA-IrisV4 database
采用定位准确率、定位时间对3种算法的适用性进行客观评价。定位准确率的含义是如果算法的定位误差在8 pixel以内,则认为算法对于该图像的定位结果是准确的。实验结果如表2所示,可以看出,相比传统径向对称变换算法和基于梯度均值的定位算法,本文方法的定位准确率更高,说明本文方法适用于大多数个体的瞳孔定位。

表2 3种算法适用性比较Tab. 2 Comparison of applicability of three algorithms
5 结 论
本文根据红外眼科疾病检测设备对于眼部对准成像的需求,提出了一种基于径向对称变换的瞳孔中心点定位算法。首先利用灰度积分投影结合最大类间方差对人眼图像进行粗分割,并通过多团块筛选条件,完成了对人眼图像的ROI分割。再根据ROI的最小外接矩形和瞳孔区域间的几何关系,并结合灰度级形态学线性滤波,减小了睫毛遮挡对参数设置的影响,确定了搜索半径范围。最后,利用改进的径向对称变换算法进行瞳孔中心点定位。
实验证明,本文算法的定位误差在8 pixel以内,平均定位时间为0.366 s。相较于传统径向对称变换算法,定位精度提高了16倍,定位时间减少了92%。可以看出,本文算法有效修正了传统径向对称变换算法计算成本高、自适应性差、易受其他具有径向对称特点的噪声区域(如反射光斑、眼皮)干扰的缺陷。另外,由实验结果可知本文算法适用于离焦模糊、睫毛遮挡、反射像明显等噪声严重的人眼图像定位,并且对于瞳孔中心不在图像采集区域内的情况也依然适用。该算法基本满足红外眼科疾病检测设备对于自动定位对准装置的要求,有助于辅助多种红外眼科疾病检测设备高效精确地进行眼组织成像。但目前,本文算法对于一些出现瞳孔变形的病眼的定位性能仍有待进一步研究,在以后的研究中会考虑在算法中加入变形程度判定模块,进而采用多方法定位来提升变形瞳孔的定位效果。
猜你喜欢
西安石油大学学报(自然科学版)(2021年2期)2021-04-23
快乐语文(2019年9期)2019-06-22
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
青年歌声(2018年2期)2018-10-20
阅读与作文(初中版)(2017年6期)2017-07-05
优雅(2016年12期)2017-02-28
中南大学学报(自然科学版)(2016年2期)2017-01-19
电影故事(2016年5期)2016-06-15
新疆钢铁(2015年3期)2015-11-08
学苑教育(2015年16期)2015-08-15