
杨泗港长江大桥主缆索股被动式水平放索装置研制
2021-06-15 07:34:20沈扬波冯高邮李沣汉肖伟成
北方交通 2021年6期
谢 锦,沈扬波,冯高邮,李沣汉,肖伟成
(柳州欧维姆机械股份有限公司 柳州市 545005)
杨泗港长江大桥主桥为跨度1700m加劲钢桁梁双层悬索桥[1],主缆采用PPWS法形成,在制索厂将钢丝、高强缠包带和锚头制成索股,成盘在直径约4.1m的索盘上,包括索盘重约为70t,每根索股由91丝Φ6.2mm的1960MPa的镀锌铝合金高强钢丝组成,每根主缆由271束无应力长约2836m索股制作。
1 放索装置放索方式的选择
1.1 放索机按动力可分为主动和被动放索
主动放索在施工过程中,主要由卷扬机引导索股,由放索机提供动力克服整个索盘旋转惯性实现放索,整体的放索过程中由于存在牵引及放索机两个动力,会存在牵引与放索速度不统一,导致索股过放或过拉,导致索股松弛、断带、散丝等影响放索质量,处理这些问题会拖延施工进度,处理不好的话甚至会影响到施工质量。再者,对于70t的索股,需要较大的扭矩电机和减速器方能实现索盘的转动,如果制动时,通过扭矩电机停止或者反转的方式单一地实现制动,将会对电机、减速器及相关的传动机构造成一定的冲击性破坏。由此可见,主动放索的方式不仅造价较高,设计复杂,而且放索的可靠性均不足。
被动放索在施工过程中放索的动力全部由牵引机提供,单一的动力牵引保证了牵引与放索的同步性。通过牵引慢慢施加动力,克服整个索盘的旋转惯性,实现放索。但被动放索也存在以下一些主要技术问题需要解决:
(1)放索过程中,匀速放索为佳。但随着索股不断减少,惯性也跟着降低,但这个过程中不可能随着惯性的降低而去不断地降低牵引力,这样的控制是很难实现的,实现起来也很复杂。施工过程中都是以控制卷扬机的转速来控制索股放索的线速度,从而实现匀速放索。
(2)放索过程中,如出现紧急情况需要在最短的时间内停止放索。需要紧急停止放索时,牵引力消失,制动装置需要能抵消掉紧急停机时索盘的转动惯性,为防止索股过放出现的质量问题,一般要求放索过程中紧急停止索盘转动应在半圈内实现。因为不管是水平放索还是纵向放索,超过半圈,索股就会开始出现过放、塌落或松弛现象。
1.2 放索机按索盘放置方式可分为水平放索和纵向放索
水平放索具有用钢量少,后锚头只需直接固定承放在成索盘上,位置相对稳定,不需要专门处理,较容易实现。纵向放索,为防止后锚头下垂,因此后锚头需要专门的装置固定,放索过程中要对后锚头拉紧固定,防止后锚头跟着索盘的转动出现甩动现象。
综上所述,本项目拟采用被动式水平放索的方式,但须主要解决以上提到的两个被动放索存在的技术问题。
2 被动式水平放索机制动原理
针对以上问题,经过综合研究,该放索机拟采用双制动结构。第一制动为阻尼制动,该部分主要是在索盘转动前,已经预先在制动盘上施加了一个牵引力反向作用力,以防止牵引力造成的索股被过拉,防止索盘转动过程中的惯性加速度造成的过放。当索盘转动时这个反向力就会起作用,达到一定速度后,与牵引力达到平衡,从而实现索股的匀速放索。第二制动为紧急制动:该部分主要是在紧急情况下额外提供足够的制动力与阻尼制动共同克服索盘的惯性力矩,使索盘快速停止转动。
通常,圆式机构的制动一般采用刹车带包裹外圆的方式,但此方式的制动力不好控制,不能很好地确保制动的时间。所以选用市场上现成的能确定额定转矩的制动器与外齿式的回转支承相配合来传递紧急制动力。该放索机拟采用的回转支承作为回转机构替代传统的轴承结构,不仅稳定性得到了提高,而且免去了轴承座的设计,降低了设计成本。制动原理示意图如图1所示。
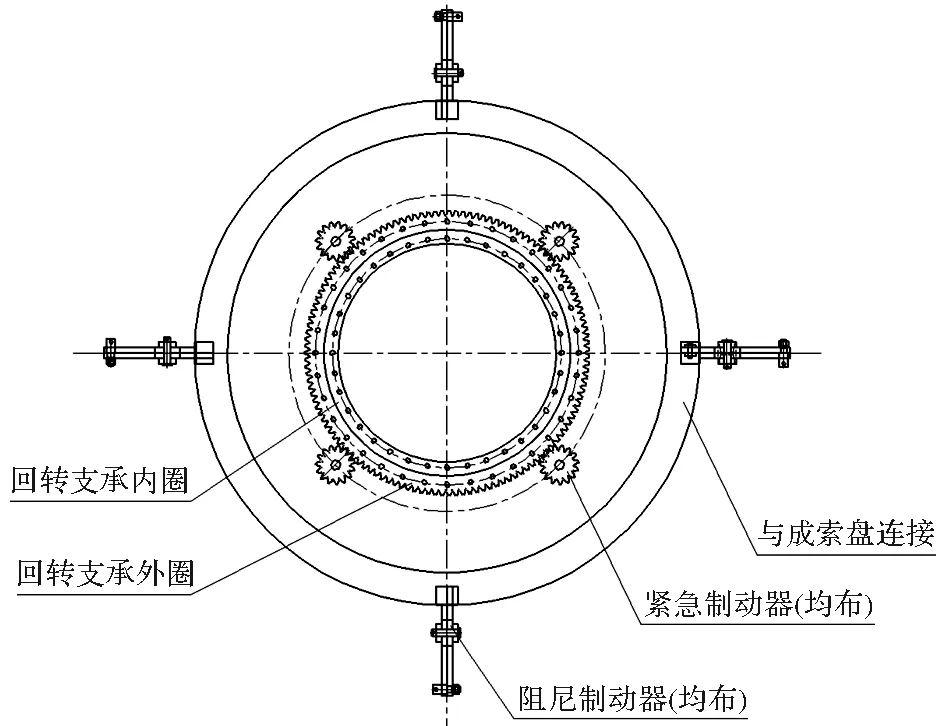
图1 制动原理示意图
3 整体结构方案
该结构,主要优势在于采用回转支承作为承载主件,同时可承受轴向和径向载荷,固定底座和旋转体能直接安装在回转支承进行固定,使安装和结构设计相对使用普通轴承承载的方式简单。旋转体上设计有刹车盘,连接座通过连接杆与成索盘连接固定。制动力由阻尼制动器和紧急制动刹车器提供,阻尼制动器作用于刹车盘上,紧急制动刹车器上装有齿轮与回转支承的外齿相作用,以实现索盘的制动功能。结构示意如图2所示。
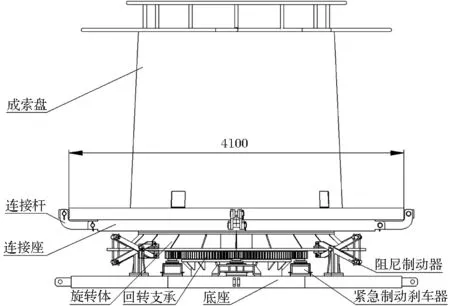
图2 整体结构示意图
4 放索机设计参数
成索盘直径4.1m,索盘加索股总重量70t,放索速度10~60m/min,施工方牵引装置参考牵引力25t。
5 关键受力设计
5.1 回转支承选型
根据放索机的结构布置,本项目选用的回转支承为外齿单排四点接触球式,并按JB/T 2300-2011进行选型计算。当承载角为45°时,接触应力最小。总轴向力Fa=700kN(总重力),总径向力Fr=250kN(牵引力),按α=45°计算:
(1)按静态工况选型[2]

当量倾翻力矩M′=1.225Mfs=1.225FrRfs(取R=1.75,索体成盘后直径)

(2)按动态工况选型[2]

当量倾翻力矩M′=1.225Mfd=1.225FrRfd(取R=1.75,索体成盘后直径)

根据回转支承承载能力曲线图,选型011.45.1250,按静态工况和动态工况计算出来的轴向力和倾翻力矩的交点,均落在所选的螺栓承载曲线的下方。如图3所示,A点为静态工况,B点为动态工况。
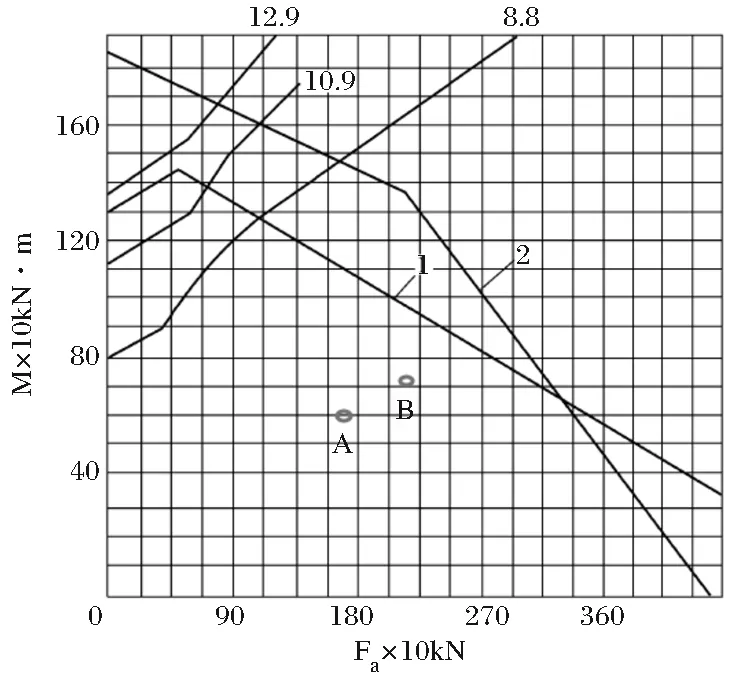
图3 011.45.1250回转支承承载能力曲线图[2]
5.2 制动力计算
5.2.1受力状态分析
(1)匀速放索时,紧急制动刹车器不工作,理论上,各种阻力产生的阻力矩M总与牵引力产生的牵引力矩M牵相等(M总=M牵)。
(2)牵引力不是恒定的,会随各种阻力变化而变化,阻尼刹车器的作用为使丝股保持一定的张力,阻尼刹车阻力随牵引力变化而调节。
(3)启动时的牵引力矩必须大于静止时的惯性矩,所以M牵≥T惯。
(4)假设牵引机启动时,M阻=0,启动时间为4s,则此时M牵≥T惯4;启动完成后,惯性矩已不再是阻碍运动的因素,为保持平衡,此时应有M总=M摩+M阻尼=M牵=T惯4;停止时,牵引力消失,需紧急制动,制动时间3s,此时:M牵=0
M制+M摩+M阻尼=T惯3→T惯3=M制+T惯4
(1)
5.2.2总转动惯量
按总质量70t,内径2500mm,外径3500mm,高2200mm的圆筒计算:
I=m(R2+r2)/2=70000×(1.72+1.252)÷2=1.56×105kg·m2
5.2.3惯性力矩
该项目的回转体主要由索体和索盘组成,因此该放索机的惯性阻力矩Tg由放索机回转中心线回转的索体惯性阻力矩和放索机的回转部分的惯性力矩TgQ+TgG组成,即Tg+TgQ+TgG,根据《起重机设计手册》[3]得:
式中:JQ—物品对放索机回转中心线的转动惯性量(kg·m2);
n—放索机的回转速度(r/min);
t—放索机启动或制动时间(s)。
设当成盘索径为3400mm时,则转速为5.6172r/min(制动时间为3s时,索松约1.5m;制动时间为4s时,索松约2m),则:


5.2.4制动力矩
总的制动力矩M总≥T惯3才能使转动体停止,即:
M总=M制+M摩+M阻尼≥T惯3
(2)
式中:M制—紧急制动刹车器提供的力矩;
M摩—除制动器以外的其余摩擦力产生的力矩,此项目中取M摩=0;
M阻尼—阻尼制动器提供的力矩。
如图2所示,旋转体设计有刹车盘,阻尼制动器作用于旋转体的刹车盘上。通常人工能徒手使用15kg的力拧紧刹车,设计结构通过加力杆和刹车力臂放大60倍,摩擦系数取0.3,作用于刹车盘的阻尼半径约为1.5m,设有4组阻尼制动器,该阻尼制动器设计为剪式力臂,每组阻尼制动器有两个作用力臂,则阻尼的制动力矩为:
M阻尼=2×4×60μmgr=3.175×104N·m
经验证M阻尼>T惯4,阻尼制动器提供的制动力矩克服惯性加速度的安全系数达到了约1.38,符合工况要求。根据该项目承载的索股,工况中M阻尼=T惯4。
综合式(1)、式(2)可得:
M制=T惯3-T惯4=0.81×104N·m
根据JB/T 2300-2011得知:回转支承的外齿模数m=12,齿数Z1=118,经校核设计紧急制动器上的小齿轮的齿数Z2=15,则传动比i=7.867,加装了4个紧急制动器,则折算到单个齿轮的转矩为:
取安全系数1.25,则T制≥319,应选用制动器的额定转矩为400N·m即可。
6 工程应用
通过在杨泗港长江大桥的实际使用,采用该被动式水平放索装置,放索后成型质量良好,放索速度能用牵引速度匹配,缠包带极少断裂。现场施工检验,每根索股约2h放索架设完成,装置在杨泗港长江大桥上的应用如图4所示。

图4 放索机在杨泗港长江大桥使用
7 结语
(1)放索装置在放索过程中,只需提前调好阻尼制动器,在需紧急制动时,启动紧急制动刹车器即可完成放索制动,操作简单。
(2)采用回转支承设计的水平放索装置,同时承受轴向和径向载荷,使受力简单、结构简单、易制做和安装、制造成本低、占地面积小。通过L形连接杆和吊装耳的连接,能实现索盘的快速更换,提高施工效率。
猜你喜欢
机电信息(2022年9期)2022-05-07 01:54:11
江苏安全生产(2021年9期)2021-11-27 08:08:28
哈尔滨铁道科技(2020年3期)2021-01-18 06:23:04
中国特种设备安全(2019年3期)2019-04-22 05:05:32
中学生数理化·高一版(2016年4期)2016-11-19 14:15:27
科普童话·百科探秘(2015年6期)2015-10-13 07:05:15
伴侣(2015年5期)2015-09-10 07:22:44
大众科学(2015年10期)2015-09-10 07:22:44
学习月刊(2015年1期)2015-07-11 01:51:10
汽车科技(2015年1期)2015-02-28 12:14:42
