
开沟旋耕机渐变螺旋升角轴向匀土刀辊设计与试验
2021-06-09 09:48李宇飞夏俊芳刘国阳康启新
农业机械学报 2021年5期
郑 侃 李宇飞 夏俊芳 刘国阳 程 健 康启新
(1.华中农业大学工学院,武汉 430070;2.农业农村部长江中下游农业装备重点实验室,武汉 430070)
0 引言
旋耕是长江中下游农业区小麦种植的主要耕作方式。该农业区雨水充沛,降雨较为集中,需开出厢沟,从而达到明水自流、暗水自降、雨住田干、降低渍害的目的[1-3]。因此,开沟常与旋耕联合作业。
近年来,国内外旋耕刀辊设计多采用组合式刀辊、等螺旋升角排列,以提高耕整质量。如杨庆璐等[4]为实现玉米秸秆的有效掩埋,设计了旋耕刀与伸缩杆组合式刀辊,在同一切土小区安装4把等螺旋升角排列的旋耕刀;张春岭等[5]研制了六头螺旋秸秆还田耕整机刀辊,旋耕刀采用四头螺旋线排列,二次切刀采用两头螺旋线排列;LEE等[6]基于水稻直播模式,设计了一种圆盘刀与旋耕刀组合式刀辊,提高了种带土壤破碎率;祝英豪等[7]优化了螺旋横刀与旋耕刀组合排列方式,形成人字型旋埋刀辊;ZHENG等[8]根据深松旋耕联合作业机深松后的土壤紧实度分布特征,设计了长短刀组合式旋耕刀辊,降低了机具振动,提高了地表平整度。
在旋耕抛土、运土方面,相关学者通过仿真、台架试验、高速摄像等手段,揭示旋耕作业过程。方会敏等[9-10]基于离散元法分析得出,提高旋耕转速可增加土壤水平运动位移与侧向运动位移,增大土壤抛撒范围;MATIN等[11-12]通过高速摄像分析旋耕刀作业时发现,普通旋耕刀侧向抛土量大,回填量小,而旋耕直刀则相反,并以此为目标优化了旋耕直刀;ZHAO等[13]采用离散元法进行土槽试验,对比了不同形状的平面刀片,结果表明,阿基米德螺旋刀片抛土量最大,正弦指数螺旋叶片抛土量最小,两者随着滑切角的增加,抛土量减少;王金峰等[14]建立了还田刀与土壤间的动力学模型,研究各参数对还田刀抛土能力的影响规律,优化了还田刀结构与运动参数。目前,旋耕机常用旋耕刀辊多为等螺旋升角排列,同一切土小区旋耕刀朝向相反,刀辊抛土性能突出,轴向匀土性能较弱。在长江中下游农业区,厢沟犁开出厢沟后,沟内土壤堆积在厢面两侧,旋耕后厢体两侧土壤高、中部低,地表平整度差,播种镇压后厢体两侧土壤密实、中部松散,轴向土壤分布均匀性差,易造成小麦长势不均匀、雨季厢体中部积水渍害严重。
为提高旋耕刀辊轴向匀土性能,本文结合长江中下游农业区小麦耕种农艺要求,设计一种渐变螺旋升角轴向匀土刀辊。分析旋耕刀轴向运土力学条件,建立旋耕刀扰土体积参数方程和渐变螺旋升角旋耕刀排列螺旋线方程,确定影响匀土性能的关键因素。基于离散元法获取匀土刀辊最优参数组合,并进行田间试验验证,以期为长江中下游农业区小麦种植开沟旋耕联合作业机设计提供参考。
1 整机结构与工作原理
1.1 整机结构
如图1所示,开沟旋耕联合作业机由厢沟犁、挡土板、悬挂架、机架、变速箱与匀土刀辊组成。左、右匀土刀辊对称安装在整机上,旋耕刀由外侧向内侧按照渐变螺旋升角排列在刀轴上;同一切土小区两把旋耕刀夹角180°,朝向均向内侧。
1.2 工作原理
匀土刀辊工作原理图如图2所示。工作时,开沟旋耕联合作业机匀速直线运动,两厢沟犁在未耕区开出两条厢沟,并将厢沟土壤扣在厢面两侧;拖拉机通过后输出轴、联合作业机变速箱带动匀土刀辊正转(与拖拉机轮子转向相同),旋耕刀对未耕区与厢沟土壤进行剪切、撕裂、后抛作用,同时因匀土刀辊由外侧向内侧旋耕刀排列的螺旋升角逐渐减小以及同一切土小区两把旋耕刀朝向均向内,使未耕区厢面两侧厢沟土壤不断向机具中部运移;土壤在匀土刀辊、挡土板的作用下运动,最终形成平整、细碎、土壤轴向分布均匀的已耕区。
2 力学分析与参数设计
分析匀土刀辊旋耕刀扰土量、作用土壤力学以及螺旋线排列,得到扰土体积数值解、轴向运动力学条件及渐变螺旋升角排列螺旋线方程,确定影响匀土刀辊匀土性能的关键因素,为优化仿真研究奠定基础。
2.1 匀土刀辊旋耕刀扰土量分析
在耕作过程中,旋耕刀扰土量直接影响刀辊轴向匀土性能,因此需构建旋耕刀扰土体积参数方程,分析旋耕刀单周期内扰土体积影响因素。首先求得同一切土小区单把旋耕刀周期内切土面积,建立刀辊某一瞬时刀轴中心O的坐标系,如图3a所示,x轴为机具前进方向、y轴为垂直地面方向。为有效切削土壤,旋耕刀运动轨迹为前进与旋转的运动合成,且符合余摆线要求。单把旋耕刀周期内切土面积S包括点P1、P2、P′1围成的曲边三角形面积S1,点P1、P′1、P′3、P3围成的矩形面积S2,并去除点P3、P4、P′3围成的曲边三角形面积S3。其中点P1为刀端某一周期第1次入土点,点P2为刀端两次周期运动交点(第1次转动),点P3为刀端相同周期第2次入土点,点P4为刀端两次周期运动交点(第2次转动),P1P2曲线方程为y1(x),P3P4曲线方程为y2(x),点P′1、P′3分别为过点P1、P3垂线与沟底线的交点。单把旋耕刀周期内切土面积S为
(1)
式中h——耕深,mm
R——旋耕刀回转半径,mm
x1、x2、x3、x4——点P1、P2、P3、P4x轴坐标,mm
由图3a可知旋耕刀端点轨迹参数方程为
(2)
式中vm——机具前进速度,m/s
ω——旋耕刀回转角速度,rad/s
t——时间,s
联立式(1)得到单把旋耕刀周期内切土面积S参数方程为

h(Rcos(ωt3)+vmt3-Rcos(ωt4)-vmt4)-

(3)
其中,旋耕刀通过点P1、P2、P3、P4的时间t1、t2、t3、t4计算式为
(4)
其次求得单把旋耕刀周期内切土厚度T,由图3b所示的旋耕刀切土厚度示意图,根据面积割补法,旋耕刀作业后切土垡片横切面积假设为平行四边形。横截面积随着旋耕刀作业深度的增加逐渐减小,其中旋耕刀正切刃切削长度L保持不变,又因正切刃弯折角θ为定值,由图3b的几何关系求得切土厚度T为
T=Lsin(π-θ)
(5)
最后由式(3)~(5)单把旋耕刀切土面积与厚度以及同一切土小区z把朝向相同旋耕刀(为保证旋耕刀碎土质量、沟底平整度,同一切土小区z把旋耕刀采用等间距分布在刀轴上)旋耕切土节距s关系式(s=2πvm/(zω))[15],求得同一切土小区z把旋耕刀作业时扰土体积V数值解为
(6)
可通过式(4)与切土节距s求出t2关系式为
(7)
综合式(6)、(7)可知,扰土体积V与z、h、s、R、ω、L、θ等参数有关。实际设计中,匀土刀辊需在满足种植农艺、实用性以及通用参数要求上进行设计。为减小土壤粘附堵塞,且便于安装,旋耕刀辊一般采用双头螺旋排列[16],z取2;依据长江中下游小麦种植农艺,为利于改善土壤耕层结构、加速土壤熟化以及小麦幼苗出土生根[17],采用旋耕作业时,耕深h取14 cm为最佳(代入公式计算时均转换成国际单位制,下同);另外为保证耕作质量,水稻收获后通过晒田和灌水造墒方式控制土壤含水率在20%~35%之间,此时,旋耕切土节距s取值范围为6~10 cm[18];稻田旱作旋耕作业常用IIT245型旋耕刀,参考GB/T 5669—2017《旋耕机械刀和刀座》,回转半径R为245 mm、正切刃弯折角θ为120°、正切刃切削长度为L为60 mm;由ω=2πn/60可将旋耕刀回转角速度ω转化为刀辊转速n,参照GB/T 5668—2017《旋耕机》,n取值范围为150~350 r/min。综合式(6)、(7),并结合上述分析,选取刀辊转速n(150~350 r/min)、旋耕切土节距s(6~10 cm)作为匀土刀辊轴向匀土性能试验因素。
2.2 旋耕刀轴向运土力学分析
旋耕刀作用土壤力学影响因素较多,不仅与旋耕机具结构、参数有关,而且与工况条件,如土壤类型、含水率、土壤形变特性相关。为确定土壤轴向运动力学条件,参考已有研究[14],假设土粒在旋耕刀上无相对位移;土粒间无相互作用力。图4a所示为土粒在旋耕刀正切面即将脱离时的空间力学分析,分别以土粒质心为原点O1、刀轴中心线一点为原点O2,以刀轴中心线方向为x0、机具前进方向为y0,垂直地表方向为z0,建立两坐标系。设土粒脱离旋耕刀正切面运动方向为Az,此时,土粒受到法向力Fn、摩擦力f、重力G以及离心力Fc综合作用。将上述力分解到x0O1z0坐标系,如图4b所示,求得土粒x0方向合力Fx为
(8)
式中α——土粒脱离时刀轴转角,(°)
δ——y0O1x0面与旋耕刀正切刃夹角,(°)
β——Az在y0O1x0面投影与y0轴夹角,(°)
将离心力Fc、重力G、摩擦力f表达式代入式(8)中可得
Fx=-(mω2R′cosα+mg)cotθ-
μ(mω2R′cosα+mg)sinβ
(9)
式中m——土粒质量,kg
R′——土粒运动回转半径,mm
μ——土壤与旋耕刀面摩擦因数
g——重力加速度,m/s2
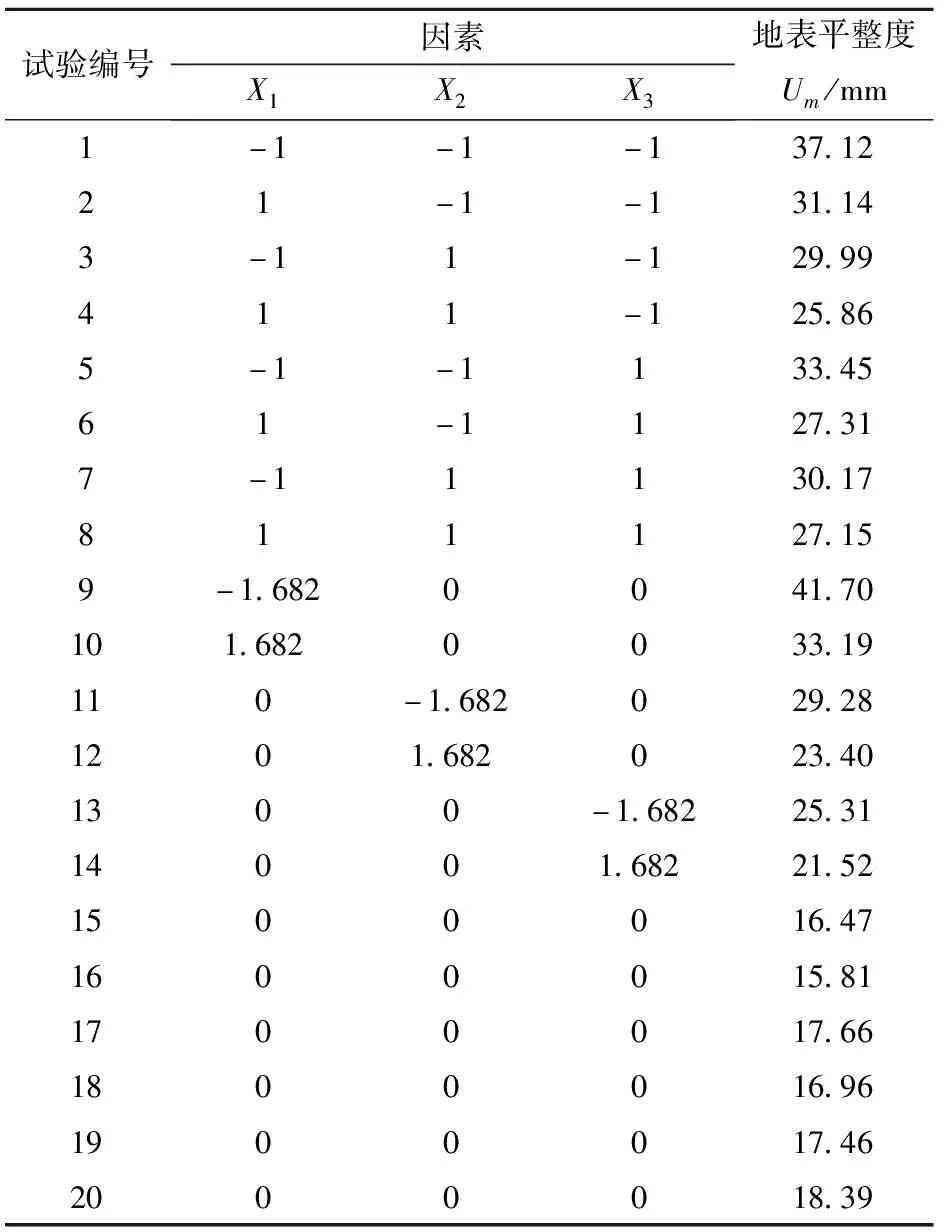
式(9)中,由正切刃弯折角θ求得y0O1x0面与旋耕刀正切刃夹角δ(δ=θ-π/2);土粒脱离时刀轴转角α取值范围为0°~90°;土壤与旋耕刀面摩擦因数μ可通过摩擦系数测定仪求得。为保证土粒能够沿着x0正方向运动,土壤轴向运动力学条件为Fx>0,即β 旋耕刀常以螺旋线排列在刀轴上,以旋耕刀辊作为参照系,所有旋耕刀作业过程为螺旋运动。参考螺旋输送机与螺旋覆土器设计可知[20-21],螺旋升角增加,导程增大,运土空间、运土量以及运土速度增大。为此,依据厢沟地表特点,构造旋耕刀渐变螺旋升角排列螺旋线方程,确定影响旋耕刀辊轴向匀土因素。图5a为渐变螺旋升角螺旋线运动形成原理,刀轴圆柱面母线上点M沿着轴线(X轴)作直线运动,与刀轴圆柱面上圆周运动合成为螺旋运动,若点M沿着轴线作等减速直线运动,点M的运动轨迹为渐变螺旋升角螺旋线,其展开图为抛物线[22],如图5b所示。此时,渐变螺旋升角螺旋线参数方程为 (10) 式中t0——点M运动时间,s A——二次项系数 R0——刀轴半径,mm ω0——点M圆周运动角速度,rad/s B——一次项系数 如图5b所示,渐变螺旋升角螺旋线在某点的切线与Y轴夹角(图5a中刀座基准面)为该点的螺旋升角λ,其正切值为抛物线函数在该点的一阶导数。由点M初始位置与终止位置,求出式(10)中系数A、B为 (11) 并得到 式中λ1——点M初始位置螺旋升角,(°) λ2——点M终止位置螺旋升角,(°) k——母线旋转圈数 W——点M初始与终止位置沿X轴距离,mm 综合式(10)、(11),求得匀土刀辊渐变螺旋升角螺旋线方程表达式为 (12) 式(12)中,匀土刀辊渐变螺旋升角螺旋线形状与R0、W、λ1、λ2等参数相关。刀轴半径R0取常用的70 mm。W与相邻旋耕刀间距以及同一条螺旋线旋耕刀数量有关,结合式(5)中旋耕刀切土厚度T,并考虑土块易堵塞,相邻旋耕刀轴向间距取80 mm,同一条螺旋线设置11把旋耕刀,则W为800 mm。安装时,将初始与终止螺旋升角代入式(12)中得出匀土刀辊渐变螺旋升角螺旋线方程,然后以80 mm为间距计算出同一螺旋线11把旋耕刀对应螺旋升角以及刀轴外表面分度线(图5b),并与图5a所示基准面交点作为刀座固接点,按照1~11编号依次进行排列,另一条螺旋线则按照同一切土小区两旋耕刀夹角180°对应排列。 旋耕刀螺旋升角过大易使旋耕机具产生振动,过小易堵塞土壤,因左、右对称刀辊两外侧对应厢沟土壤、地表高,为增大轴向运土量,提高地表平整度,机具两外侧螺旋升角较大,逐渐向中间减小,同一条螺旋线旋耕刀螺旋升角范围为54°~85°[23],且左侧刀辊螺旋线左旋、右侧刀辊螺旋线右旋(图1a)。综上,终止螺旋升角λ2取54°,选择初始螺旋升角λ1作为匀土刀辊轴向匀土性能关键因素,取值范围54°~85°。 采用EDEM软件,构建匀土刀辊离散元仿真模型;通过正交试验,建立上述分析得到的匀土刀辊关键因素与作业后地表平整度间的回归方程,分析各因素交互作用对地表平整度的影响,最终得到最优因素组合,为后续刀辊试制试验奠定基础。 采用干筛法测量试验区土壤质地为中黏土(黏粒质量分数42.46%),使用TMS-PRO型质构仪与ZJ-4L型应变控制式直剪仪,测定土壤表现为塑性形变与黏聚力均为非线性。因此确定土壤颗粒间模型采用非线性黏结弹性塑性接触模型(Edinburgh elasto-plastic adhesion,EEPA);土壤与部件为Hertz-Mindlin no Slip模型[24]。结合前期标定与相关研究[25-26],设置土壤颗粒半径为4 mm;土壤本征参数:泊松比0.4、密度1 650 kg/m3、剪切模量2.8×107Pa;机具本征参数:泊松比0.3、密度7 800 kg/m3、剪切模量7×107Pa;接触参数:颗粒间的恢复系数0.2、静摩擦因数0.67、滚动摩擦因数0.03,土壤与机具间的恢复系数0.2,静摩擦因数0.75、滚动摩擦因数0.1。受到仿真运行时间和存储空间的限制,又因整机以中心面左、右对称,对称两刀辊并无相互影响,仿真只运行整机一侧,建立尺寸为3 000 mm×1 500 mm×500 mm虚拟土槽。 依据长江中下游农业区小麦种植农艺[17],厢沟深度大于30 cm、沟宽25 cm左右,考虑到土壤旋耕后地表线抬高因素[27],设置厢沟犁作业深度为25 cm、宽度为15 cm。为直观反映地表情况,仿真时将挡土板抬高至耕前地表线上方10 cm处,结合所需的匀土刀辊参数,运用SolidWorks软件同比例创建整机仿真模型导入EDEM软件中。为保证机器仿真过程中土壤颗粒连续运动,设定固定时间步长为2×10-5s,Rayleigh时间步长的5%,网格单元尺寸为最小颗粒半径的3倍,总仿真时间为5 s。 基于2.1~2.3节分析,选取刀辊转速n、旋耕切土节距s、初始螺旋升角λ1为试验因素,根据中心组合试验(CCD)设计原理,设置因素参数进行离散元仿真。其中耕深h设置14 cm,机具前进速度vm可由每组试验对应的刀辊转速n与旋耕切土节距s求得(vm=ns/3 000)。试验因素编码如表1所示。 表1 试验因素编码 使用耕后地表平整度作为匀土刀辊匀土性能指标。测定方法为:利用EDEM软件截断模块(Clipping),在匀土刀辊正后方随机选取一个厚度100 mm切片,如图6所示。提取该切片地表土壤颗粒稳定后的坐标值,将坐标值导入CAD软件中采用样条曲线连接,绘制出旋耕作业后地表线。过最高点作一条水平直线作为基准线,在旋耕作业宽度800 mm范围内以50 mm等分标记测点。测定各测点水平基准线至地表线垂直距离,记为ai。计算各测点垂直距离平均值am以及标准差U为 (13) 式中n——每次测定测点数 每组试验测定3次,以标准差平均值Um表示地表平整度。 3.3.1仿真结果 通过EDEM软件运行试验方案,共进行20组,测定结果如表2所示,表中X1、X2、X3为因素编码值。利用Design-Expert 8.0.6分析软件对试验结果进行处理,分析刀辊转速n、旋耕切土节距s、初始螺旋升角λ1对地表平整度Um影响显著性,拟合回归方程获得测定指标的响应模型。 表2 试验方案与结果 表3 地表平整度回归模型显著性分析 Um=17.11-2.46X1-1.88X2-0.91X3+0.62X1X2+ (14) 3.3.2各因素交互作用对地表平整度影响分析 由地表平整度回归模型显著性分析可知,刀辊转速n与旋耕切土节距s、旋耕切土节距s与初始螺旋升角λ1对地表平整度有交互影响,绘制交互作用响应曲面如图7所示。 由图7a可知,在匀土刀辊初始螺旋升角处于中心水平,当旋耕切土截距一定时,地表平整度随着刀辊转速增加呈先降后升趋势;当刀辊转速一定时,地表平整度亦随旋耕切土截距增加呈先减后增趋势。刀辊转速较低时(图8a),土壤颗粒在旋耕刀作用下轴向速度较低,轴向运动位移小,致使覆盖在厢面的厢沟土壤并未及时运移,机具外侧土壤多,降低了地表平整性;刀辊转速过高时(图8b),轴向速度大、扰土量多、轴向运动位移大,机具中部变速箱两侧位置堆积土壤过多,同样降低了地表平整性。旋耕切土节距小时(图8c),旋耕刀周期内扰土体积小,导致总体轴向输土量低,地表平整性较低;旋耕切土节距大时(图8d),旋耕刀周期内扰土体积过大,相应的土壤轴向移动量过多,机具中部位置堆积土壤过剩,地表平整性同样较低。 由图7b可知,在刀辊转速处于中心水平下,地表平整度均随着旋耕切土节距、初始螺旋升角增加,呈现先减后增趋势。旋耕切土节距一定时,初始螺旋升角越高,刀辊外侧导程越长,单位时间内螺旋输送土壤量大。当初始螺旋升角从71°增加到85°时,不仅覆盖在厢面的厢沟土壤全部输送,而且运送了一部分厢沟土壤下部未耕土壤,地表平整性略有降低。 3.3.3匀土刀辊最优参数组合 为得到匀土刀辊最优参数组合,采用非线性规划理论,对目标函数式(14)优化求解。设置约束条件为:刀辊转速150~350 r/min、旋耕切土节距6~10 cm、初始螺旋升角54°~85°。求得刀辊转速259.4 r/min、旋耕切土节距8.29 cm、初始螺旋升角70.76°时,地表平整度最优,为16.62 mm。为验证优化结果的准确性,重新进行仿真。考虑到刀辊转速取259 r/min机具变速箱传动比不易设置,因此刀辊转速取260 r/min,旋耕切土节距8.3 cm,初始螺旋升角71°,测定3次求平均值,得到最优地表平整度为17.35 mm,仿真验证与理论结果基本一致,说明回归方程准确。 为验证匀土刀辊实际作业性能,于2020年12月10日在华中农业大学校内试验田进行田间试验,试验现场如图9所示。试验设备主要包括常发DFF1204型拖拉机、开沟旋耕联合作业样机机架、匀土刀辊(初始螺旋升角71°,终止螺旋升角54°)、常用旋耕刀辊(左、右刀辊共安装44把IIT245型旋耕刀,同一切土小区两把旋耕刀朝向相反,夹角135°,旋耕刀螺旋升角均为54°)、田间作业机具综合性能测试车、环刀(内径61.8 mm×高20 mm)、卷尺、钢尺、电子秤、密封袋等。测试区前茬作物为水稻,秸秆离田处理。土壤为中黏土,深度0~25 cm土壤容重均值1.38 g/cm3、含水率均值20.27%、紧实度均值1 657.2 kPa。耕作前地表平整度均值7.17 mm、耕前深度0~15 cm土壤均匀度均值19.92%。 选择地势平坦地块作为测试区,划分6个长度80 m、宽度3 m的试验小区,中间60 m作为测量区域,两刀辊各进行3个行程。依据优化后旋耕切土节距8.3 cm,计算得出作业速度为2.59 km/h,通过测试车上位机与拖拉机挡位控制作业速度,使机组作业速度在(2.59±0.2)km/h范围内;拖拉机后输出760 r/min,调节测试车多级变速器模块(5挡位),使刀轴转速稳定在260 r/min;设定下拉杆长度使旋耕刀作业深度为14 cm;调节限位螺栓使厢沟犁作业深度为25 cm。 地表平整度按照3.2节仿真测定方法;因挡土板对耕后地表起压实作用,不能真实反映两刀辊地表平整度状况,需测定土壤轴向分布均匀度;耕深稳定性系数、碎土率指标参考GB/T 5668—2017《旋耕机》。 4.2.1土壤轴向分布均匀度 在已耕厢面以15 cm间隔等分,使用环刀测定土壤湿容重,测量深度0~5 cm、5~10 cm、10~15 cm,每个行程测定3次,求得3个行程均匀度平均值au、均匀度标准差Su、均匀度变异系数Vu,并将Vu作为衡量旋耕刀辊作业后耕层土壤轴向分布均匀度[28]。 4.2.2耕深稳定性系数 在作业后的测量区域内,沿机组前进方向,使用钢尺插入土壤测定旋耕深度,前进方向每隔2 m左、右各测定5个点,共测量40 m,求得3个行程耕深平均值hs、耕深标准差Ss、耕深变异系数Vs,计算耕深稳定性系数Us。 4.2.3碎土率 在作业后的测量区域内随机测定0.5 m×0.5 m面积内的全耕层土块,土块最长边大于等于4 cm的土块质量Gb及土块总质量Gt,计算碎土率 (15) 每个行程测定2次,求均值。 两刀辊田间作业后地表平整度、土壤轴向分布均匀度、耕深稳定性系数、碎土率测定结果如表4所示。 表4 试验测定结果 匀土刀辊田间试验与仿真结果对比可知,仿真地表平整度略大于田间试验结果,两者相差2.85 mm,分析原因为:田间试验中机具挡土板在强力压缩弹簧和自身重力的作用下,对旋耕作业后的表层细碎土壤起到压实和抹平效果;仿真中挡土板不能实现浮动作用,为此抬高了10 cm。以上原因造成了平整度的误差,仿真基本能反映机具作业后的地表平整度。 两旋耕刀辊田间试验结果表明,匀土刀辊作业后地表平整度、土壤轴向分布均匀度、耕深稳定性系数均值为14.5 mm、8.82%、92.34%,优于常用旋耕刀辊,且标准差低于常用旋耕刀辊;匀土刀辊碎土率为81.66%,与常用旋耕刀辊相差不大,并不影响碎土率。经分析两刀辊作业过程可知,当厢沟土壤以垡状覆盖在厢面上时,常用旋耕刀辊旋耕刀采用等螺旋升角排列,作业过程厢沟土壤未及时向内侧输送,造成刀辊被两侧土壤抬高,作业后厢面呈现两侧高中间低(图10a),地表平整度、土壤轴向分布均匀度、耕深稳定性较差;当厢沟土壤以碎土状覆盖在厢面上时,常用旋耕刀辊作业后,对应的指标较好,但同一切土小区两把旋耕刀朝向相反,旋耕刀抛土后掩埋了厢沟(图10a),以上过程使常用旋耕刀辊测定结果浮动较大。匀土刀辊提高了两侧土壤向内的输土量,使机具性能指标、稳定性以及厢沟犁成沟质量较好(图10b)。 (1)设计了一种渐变螺旋升角轴向匀土刀辊,增大了开沟旋耕联合作业机厢体两侧堆积土壤的向内输送量,提高了地表平整度与土壤轴向分布均匀度,降低了厢体中部的积水渍害,利于后续小麦生长。 (2)对匀土刀辊旋耕刀扰土量、轴向运土力学条件以及渐变螺旋升角排列螺旋线进行理论分析,确定影响匀土刀辊轴向匀土性能的关键因素为刀辊转速、旋耕切土节距与初始螺旋升角。 (3)运用离散元仿真,结合中心组合正交试验得出:刀辊转速260 r/min、旋耕切土节距8.3 cm、初始螺旋升角71°为最优参数组合,此时,仿真地表平整度为17.35 mm。 (4)田间试验表明,匀土刀辊作业后,地表平整度、土壤轴向分布均匀度、耕深稳定性系数的均值分别为14.5 mm、8.82%、92.34%,优于常用旋耕刀辊,且厢沟犁成沟质量更好;匀土刀辊碎土率为81.66%,与常用旋耕刀辊碎土率相近,其整体效果更利于长江中下游农业区的小麦种床整备。2.3 渐变螺旋升角旋耕刀排列螺旋线分析
3 离散元仿真
3.1 仿真模型建立
3.2 试验设计与测量方法

3.3 仿真结果与分析



4 田间试验
4.1 试验条件
4.2 试验方法
4.3 试验结果与分析

5 结论
猜你喜欢
动漫界·幼教365(小班)(2022年8期)2022-07-12
建材发展导向(2022年2期)2022-03-08
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
建材发展导向(2021年9期)2021-07-16
火箭推进(2020年6期)2021-01-05
建材发展导向(2019年10期)2019-08-24
筑路机械与施工机械化(2019年5期)2019-06-05
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
北京航空航天大学学报(2017年4期)2017-11-23
