
结构光三维扫描测量在逆向建模中的应用研究
2021-06-07 01:45曹高原曹学明王绪杰
模具制造 2021年4期
曹高原,曹学明,王绪杰
(深圳市银宝山新检测技术公司,广东深圳 518108)
1 引言
随着信息技术的广泛应用以及数字地球、数字城市、虚拟现实等概念的出现,人们对空间三维信息的需求更加迫切。工业上也因5轴联动机床的普及,传统的二维测量数据已经不能跟上工业发展的脚步。如何快速、准确地将物体的三维信息数字化并输入计算机成为现代工业检测的新领域。逆向扫描测量工程的出现和发展为空间三维信息的获取提供了全新的技术手段,为信息数字化工业发展提供了必要的生产条件。逆向工程在制造业中最常见的两种方式是触测式三坐标测量和结构光三维扫描测量。两种测量方法都可以获取实体的数字化三维信息。本文通过对比两种测量方式的原理、流程和结果,提出了结构光三维扫描仪在产品逆向建模中能更好的将产品真实还原。
2 触测式三坐标测量机与结构光三维测量机的差异
2.1 测量原理的不同
(1)三坐标测量机扫描测量原理。
触测式三坐标测量机是基于坐标测量的通用化测量设备。测量前将被测物体放入可测量行程内,设定笛卡尔三维坐标系,在被测产品的测量部位,采用触发式逐点扫描测量,将扫描测量点进行位置拟合,再根据所扫描点集合的空间坐标值,计算出其尺寸和形位误差,最后运用三维建模软件将扫描的点集创建成各类几何特征,进而拟合构造成可编辑的三维实体数学模型。
(2)结构光三维扫描测量原理。
结构光三维扫描测量是利用测量系统中的电子光学体结构光,采用非接触三角法则扫描测量原理,通过光源信号发射接收,将结构光投射到产品的表面,在产品表面形成由被测物体表面形状相拟合的三维图像,该三维图像通过两组相机拍摄获得物体空间维度的畸变图像,根据结构光的3D信息,利用三维重构技术,经过计算机处理得到物体表面的三维点云信息,再利用软件将成像的点云划分领域并拟合成三维几何特征构造实体。
2.2 产品扫描测量及逆向过程的差异
(1)三坐标测量机扫描测量过程。
在三坐标扫描测量中,基于其精度及特性考虑,测量机需要在高标准恒温恒湿测量实验室环境中,并且被测产品也需要在测量实验室中放置至少8h以上(被测物根据不同材质放置时间可适当增加或者减少),测量实验室环境相对湿度:30%~70%(无冷凝),温度:19℃~21℃,温度时间梯度:0.5℃/h,温度空间梯度:0.5℃/m,并确保电压信号的稳定以及测量实验室的震动幅度以及噪音情况,以确保测量结果的可靠性。
根据扫描测量数据稳定性的需求特性,必须对产品进行测量前的固定夹持安装,用以保证扫描测量数据精确度以及重复性。在对测量产品的固定夹持安装前,要用无水酒精将测量机和测量产品分别擦拭以确保测量精度,在对测量产品的固定夹持安装中,还需要考虑设备的有效行程、测针大小的合适性、测量特征的有效分布等。如图1所示,将被测齿轮放置在三坐标测量机的工作台上,可以采用固定式三爪夹持工具对齿轮作夹紧悬空处理,利于后续测量过程中的稳定性。
测量产品前需要对探针进行校验,根据图1展示的产品对它的测量选用红宝石直径为φ2mm的球型触发式探针,测杆长度为60mm。在根据实际测量的位置,选择探针的角度,由于在不同的扫描测量方向上运动矢量不同以及其他外界干扰的影响,实际的测针半径也不完全相同,为了提高测量精度,每个测量方向在使用前必须进行探针的精度校验。探针校验的目的是:计算出红宝石探针球心与三坐标测量机零点的位置及补偿关系。
扫描测量产品前,需要对产品进行坐标系的建立。建立坐标系分为两步:手动坐标系和自动坐标系。手动坐标系的目的是确定零件的位置,作为程序自动运行基础,通常会测量较少的测量点,又称参考坐标系;自动坐标系的目的是准确测量相关基准元素,作为后续尺寸评价的基准,通常会测量更多的点数,又称精确坐标系。在对齿轮测量前的坐标系建立中,结合齿轮在三坐标测量机上的夹持形态,一般以齿轮的向上平面作为坐标系XY平面、垂直法向为Z轴,齿轮中心在XY平面的投影为X、Y原点。
在扫描测量过程中,首先打开三坐标测量软件PC-DMIS,新建测量程序,加载所选择的测针,根据实际需求校验测针,建立坐标系。分析产品结构,首先测量齿轮中心圆的,用手动取点的方式在中心圆的圆周上均匀取8个点,点击“END”键测量软件PC-DMIS自动识别此8个点并构造成圆形。用手动取点的方式在齿轮上平面的边界处均匀取16个点,取点时要保证这16个点在Z轴上同一高度,保持Z轴水平有两个方法第一在手动打点时将Z轴的移动方向锁死,第二种方法是去点后将Z轴的坐标改成同一数值,点击“END”键测量软件PC-DMIS自动识别此16点并构造一个平面。用手动取点的方式在齿轮的最外圆上均匀分布的方式取16个点,取点时这16个点也要保证在Z轴方向上高度一致,点击“END”键测量软件PC-DMIS自动识别此16个点并构造成圆形。用手动取点的方式在齿轮的齿底部均匀分布的方式取16个点,点击“END”键测量软件PC-DMIS自动识别此16个点并构造成圆形。将水平指向右的齿定义为1号齿,用手动测量的方式在1号齿的左齿面取8个点,点击“END”键测量软件PC-DMIS自动识别此8个点并构造成平面,用手动测量的方式在1号齿的右齿面取8个点,点击“END”键测量软件PC-DMIS自动识别此8个点并构造成平面。用同样的方法在30个齿上取点,并构造成曲面。
触测扫描结束后,使用测量软件PC-DMIS中的扫描点元素导出成为“.psl”点云格式(见图2),将导出的点云用逆向建模软件Design X打开(见图3)。

图2 转换为psl格式
图3 导入逆向建模软件
根据点云进行三角面片拟合,再通过软件的曲面放样(见图4),切除拉伸等绘制出三维实体齿轮模型(见图5)。
图4 曲面拟合

图5 实体建模
(2)结构光三维扫描测量过程。
采用结构光三维扫描测量产品时,不需要考虑环境对测量精度的影响,由于考虑到光束对测量的影响,通过向被测物体投射蓝光编码光来消除物体表面不同反射率对测量精度的影响。相比三坐标测量机,蓝光扫描仪体积更小移动更灵活。用结构光扫描时产品不需要在扫描过程中建立坐标系统,仅需要对被测物体表面粘贴标记点,以便后续曲面拼合和重构工作。
由于部分产品表面反射光的能力较弱,需要喷涂显像剂来增强表面的反射力配合点云GOM软件进行扫描系统的矫正。在喷涂显像剂时要喷涂均匀,不能过多的喷涂改变被测物体的实际表面形状与数值,在被测产品表面贴标记点时要均匀进可能的在结构少法向指向一致的位置上贴标记点。
结构光扫描测量时,将被测物体放入扫描转台上(见图6),扫描转台一般为黑色,最大的降低投射到物体表面的光束被扫描台吸收。如果在现场作业,为了提高扫描精度需要适当的遮蔽强光,避免因强光对结构光扫描过程产生影响。

图6 齿轮结构光扫描
打开扫描软件GOM,在软件中新建扫描程序,根据图6中被测物体的特征将扫描分为两部分,一部分为产品的外表面,一部分为产品的下表面。打开扫描软件GOM,新建扫描文件,将投射出的光束对准产品,在软件中反复点击摄像头对物体进行结构光扫描测量,直到该光束范围内物体成像清晰,转动转台调整摄像头位置直到上表面轮廓大概扫描清晰为止,之后将被测物体翻转过来扫描另外一部分。因为将此物体翻转过来与之前测得的三维扫描体有两个面是重合的固可以直接在一个项目中扫描,将上下表面两部分扫描成为一个整体。
通常可将分开的两部分各自扫描成一个整体,扫描结束后再通过软件将两部分扫描体整合为一个整体,此被测物扫描出的三维形态的点云(见图7)。
将结构光扫描测量生成的三维形态点云导出格式为.STL,并导入到Design X软件进行实物的实体绘制。首先将扫描出的三维模型在坐标系下进行摆正,分析拟合实体的先后顺序,一般顺序为先整体在细节,由外部到内部,先拉伸后切除。在每构造一个特征后,要与三维扫描体进行对比偏差在允许的公差范围内在确定生成特征。直到每一个特征都创建出来,拟合实体,如图8所示。
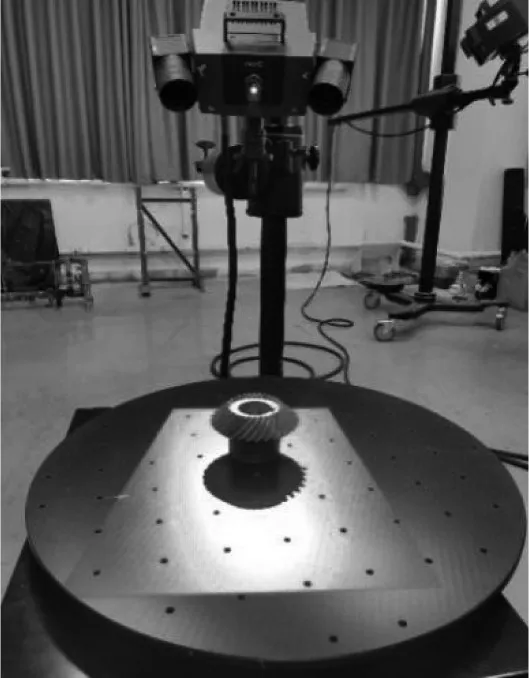
图7 三维形态的点云

图8 拟合构建的实体
逆向构建出的实体模型,还可与结构光扫描测量出的点云进行拟合精度的色域比对,实时分析出产品表面的结构是否完备和精度是否符合要求,如图9所示。

图9 实体与点云色域精度比对
3 结构光三维扫描测量在逆向建模的优势
根据三坐标测量机扫描测量与结构光三维扫描测量在实际扫描测量逆向过程中的对比,结构光三维扫描测量在扫描测量以及逆向建模中优势明显,其主要体现如下:
三坐标测量机在扫描测量过程中,使用的是触测式扫描的方式;而结构光三维扫描测量仪则是采用非接触式光学扫描。非接触式光学扫描过程中,避免了触测式扫描所带来的产品形态接触式的形态变化,更好地克服了产品的外形变化所带来的准确性。
三坐标测量机在触测式扫描过程中,为单点式触测,对于产品的整体曲面而言,单点式触测方式,较易漏测产品曲面部分的关键曲率部位,且产品边缘部分及倒角部分是触测式扫描测量无法进行的。结构光三维扫描测量仪,通过光学扫描,有效地对产品曲面曲率的点云扫描测量,克服了因接触式无法测量的部位的准确扫描。
三坐标测量机在触测式扫描测量过程中,所扫描出来的特征点云为间隔较大形态,具体间隔局限于探针的直径和扫描间距设定,点云中间距过大,产品形态的准确度较低。结构光三维扫描测量仪所扫描测量出来的点云密度极大,扫描测量过程中,极大地保证了产品表面形态的高度拟合,有效还原产品的真实形态。
三坐标测量机所触测式扫描生成的点云,在逆向建模过程中,由于点云密度不高,所拟合生成的曲面形态,与真实产品曲面曲率存在较大差异,逆向设计出的实体模型,与真实产品也存在较大差异。结构光三维扫描测量仪所扫描出来的点云,其优异点主要体现在密度大,在逆向建模过程中,通过密度大的点云所拟合建立出来的曲面曲率,与真实产品相差较小,满足产品的扫描测量及逆向建模需求。
三坐标测量机扫描测量生成的点云间隔较大,根据其建立的实体模型,与点云的色域对比,存在较大误差。结构光三维扫描测量信的点云间隔小,所建立的产品实体模型,与点云的比对过程中,色域差体现精确,可根据色差进行实时调整实体模型。
综上所述,结构光三维扫描测量在克服产品形态变化、扫描范围覆盖、扫描点云密度、点云拟合精度等方面都具有较大的优势。
4 结束语
通过对比触测式三坐标测量机与结构光三维扫描测量两种测量方法的测量原理、测量过程、实体拟合结果,分析两种测量方式的优缺点,得出结构光三维扫描仪在扫描测量及逆向建模过程中,可有效地克服产品的接触式变形,保证曲面曲率精确拟合和逆向建模的产品真实还原度。在现代工业制造及测量进程中,对产品的实体形态进行可靠有效地扫描及逆向设计,为产品前期的设计、中期的修正、后期的量产起到切实有效的作用,同时,也保证了产品的快速扫描测量及逆向建模的时效性。
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
导航定位学报(2022年2期)2022-04-11
少儿科学周刊·儿童版(2020年9期)2020-11-25
中华诗词(2020年12期)2020-07-22
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
