共享任务对汽车安全性和软件可用性的影响
2021-06-06 08:42:42景春晖支锦亦
西南交通大学学报 2021年2期
景春晖 ,支锦亦
(西南交通大学建筑与设计学院,四川 成都 611756)
驾驶时使用手机对驾驶安全有重大影响[1-6],司机在使用手机过程中出车祸的概率为42%[7]. 反向来看,驾驶任务也对手机交互可用性产生了影响,即“逆向效应”[8-11]. 如今,由于以汽车共享经济为代表的“零工经济”(gig economy)的出现,开车时使用手机的情况更加有所增加[12]. 中国国家信息中心共享经济研究中心发布的《2019年度中国共享经济年度报告》[13]提到,2015年—2018年网上出租车乘客数量从9.5%增加到36.3%. 截至2018年底,滴滴出行已连接4.5亿多乘客和2100万司机,每天收到74.3亿份订单,完成2500多万份订单,服务城市超过400个. 这将导致一系列与手机分心驾驶(mobile phone distracted driving,MPDD)和双任务干扰相关的问题[11]. 然而,目前关于汽车共享任务的研究较少. 关于车内使用手机的研究主要集中在通话任务上(近60%),其次是发短信任务(近38%)[11]. 因此,亟需关于共享汽车软件对驾驶安全性和交互可用性的研究.
目前,关于车内使用手机的研究主要集中在手机交互任务对驾驶安全性的影响上. 例如,执行音乐搜索或导航任务对驾驶员视觉注意力和驾驶能力的影响[12-15],免提和手持移动电话对驾驶性能的影响等[16]. 在车内使用手机会增加反应时间[17-18],损害视觉注意力分布[19-20],减少车道变换频率[21],增加跟车距离[18],以及降低行驶速度[22]等. 这些干扰都将导致驾驶安全风险的增加.
但近年来,对逆向效应的研究开始出现[11]. 保持车辆横向控制稳定将导致人的语言交互能力的降低[8],驾驶会影响手机的交互响应时间[23],驾驶任务会影响发短信的准确性[10]. 然而,目前,类似的研究还远远少于驾驶安全性的研究,因此有必要在进行驾驶安全性研究的同时进行交互可用性研究.
在现有研究中,驾驶安全性可以用以下变量反映:速度偏差(使用手机会导致更高的速度偏差和横向加速度可变性)[11,24]、车速(开车时说话/拨号/发短信会导致速度降低)[11]、制动响应时间和刹车时间[25-29]、驾驶错误[30]、认知负荷[31]、方向盘修正量[32]等. 为了在汽车共享任务中确定这些变量的表现,本研究选取车速、驾驶错误、方向盘修正次数以及制动时间等参数作为驾驶安全性变量. 对于反映交互可用性的变量,Harrison等[33]指出最常见的可用性变量是有效性、效率和满意度(超过50%). 另外,认知负荷也被认为是可用性的一个重要方面[34]. 交互时间和交互错误也可以被用作衡量交互绩效[35]. 因此,本研究选取交互错误(效度)、交互时间(效率)、满意度、认知负荷作为交互可用性变量.
如Choudhary等[36]所述,目前关于手机和驾驶相互影响的研究大多在发达国家开展,在发展中国家开展的工作很少. 然而,在发展中国家驾驶时使用手机的情况非常常见[1]. 此外,种族、习惯和文化因素会导致交互和驾驶表现的不同. 例如,Nakano等[37]指出美国和日本用户在搜索习惯和搜索速度上就存在差异. 因此,有必要在中国(人口最多的发展中国家)进行研究.
综上,关于汽车共享的驾驶安全性和交互可用性研究面临以下问题:
1) 在驾驶时使用汽车共享软件是否会对驾驶安全性产生影响;
2) 逆向来看,驾驶任务是否会影响汽车共享软件的交互可用性绩效;
3) 影响的绩效指标和影响机制尚不明确.
1 研究方法
1.1 试验材料
研究采用现场观察和问卷的方法对30名经验丰富的中国司机进行了调查. 驾驶员的年龄为20~45岁(均值为36.56岁,标准差为5.24岁). 被试对汽车共享软件的交互流程进行了排序,共获得11项主要功能,包括呼叫乘客、个人信息、订购等. 参与者通过排序最终确定了3个最常见的功能,对应试验交互任务T1~T3:接单(任务T1)、确认信息(乘客信息、目的地等)(任务T2)、目的地搜索(通过平移或缩放确定手机屏幕地图上的目标位置)(任务T3).开发了3个试验测试demo,如图1所示.
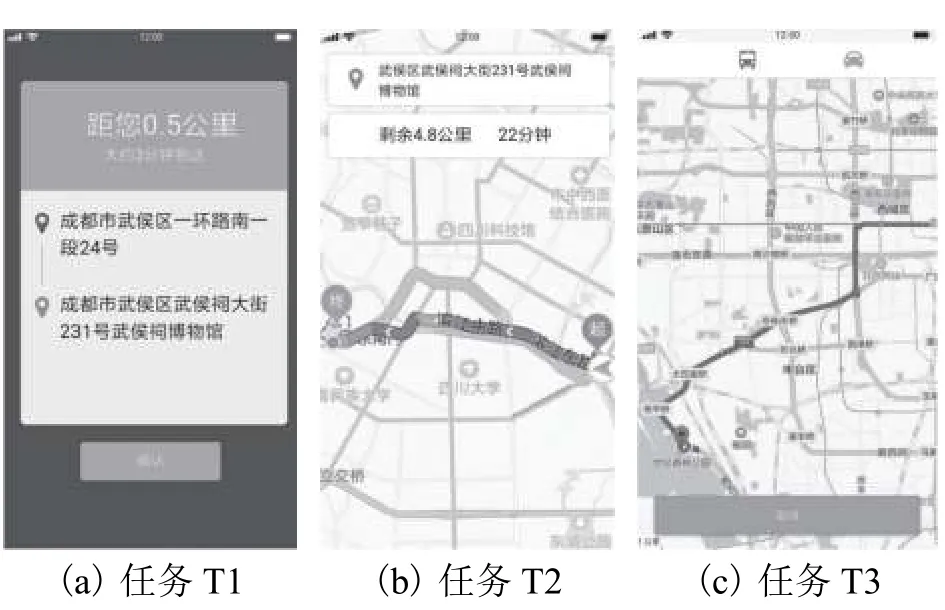
图1 试验demo界面Fig. 1 Three experimental demo interfaces
1.2 实证研究
1.2.1 参与者
研究招募了24名熟练使用滴滴出行软件的司机作为参与者,均为20~45岁(均值为33.43岁,标准差为6.32岁)的右撇子男性,每周驾驶3次以上,每天驾驶10 h以上,持续5年以上(司机拥有足够的经验,从而消除经验不足引发的影响). 所有被试都身体健康,视力正常,驾驶小型手动车,并且有使用汽车共享软件的经验. 为了排除年龄对感知可用性的潜在影响,选择了相同年龄组的参与者[12].
1.2.2试验设备与环境
本文选用驾驶模拟器而不是在真实环境中进行试验研究. 尽管有研究认为模拟器缺乏真实感[11],但模拟器较为安全,控制驾驶参数很容易[32]. 此外,驾驶模拟器的效度并不比真车自然驾驶差[7].
在MPDD相关研究中,驾驶模拟器试验的道路环境大都选择了双车道道路[6,32],文本选取一条模拟中国城市的双车道道路作为试验道路. 道路负荷较低,从而避免对驾驶的意外影响. 根据中国市区道路法规,最高车速限制为60 km/h[38].
使用的手机为5.7英寸(1920像素 × 1080像素)触摸屏,使用滴滴司机常用的可旋转手机支架架设在滴滴司机最常放置的位置:右侧空调出风口处,如图2所示.

图2 试验设备Fig. 2 Experimental equipment
此外,还使用了调查问卷、高清摄像机和笔记本电脑等设备.
1.2.3 测试内容
因变量包括驾驶安全性变量和交互可用性变量.
驾驶安全性变量包括制动响应时间、制动停车时间、车速、认知负荷、方向盘修正幅度和次数、驾驶错误. 制动响应时间为司机自收到制动信号到做出制动动作的时间;制动停车时间为司机在做出制动反应后到车辆减速至20 km/h的时间;车速为司机执行任务时的车辆平均速度;认知负荷是通过NASATLX量表确定[39];方向盘校正幅度和次数分别为驾驶员在10 s内执行交互任务时调整方向盘的平均角度和总次数;驾驶错误为检测到的车辆越过道路基线的次数.
交互可用性变量包括交互时间(效率)、交互错误(效度)、认知负荷和满意度. 交互时间为完成交互任务所需的时间;交互错误为交互任务执行错误的次数;认知负荷和满意度分别使用认知负荷问卷和满意度问卷[40]确定.
1.2.4 试验任务和程序
1) 任务T1:参与者在收到开始命令后,查看手机屏幕上显示的文字信息,当信息被确认后,点击“确认”按钮;按钮被点击后信息消失(图1(a));此任务需要少量手指和视觉交互.
2) 任务T2:参与者在收到开始命令后,在驾驶的同时通过手机屏幕检查路线信息(路线信息提供了距离目标的距离和路线的方向等信息)(图1(b));此任务只需要视觉交互但是需要记住相关信息.
3) 任务T3:参与者在驾驶时收到开始命令后,立即查看手机屏幕上的目的地信息,目的地在屏幕外,因此参与者应通过拖动或缩放(基于个人习惯)将标记的目的地图标移动到屏幕内[41](图1(c));这项任务需要相对较多的手指和视觉交互.
试验步骤如下:
步骤1收集被试的基本信息,如驾龄、年龄、性别、驾驶习惯、车型、汽车共享软件使用经验等.
步骤2告知被试驾驶和交互任务,并训练15 min以便熟悉交互任务和驾驶任务. 当被试完成驾驶互动任务后,需要完成认知负荷和满意度量表.
步骤3调整手机位置和座椅位置. 当汽车处于停车状态时,对参与者进行T1~T3测试,每项任务完成后,完成认知负荷量表和满意度量表.
步骤4在中国典型的低交通负荷城市双车道道路上以40~50 km/h的正常速度行驶. 在正常驾驶5 min后,被试在驾驶状态下依次接受T1~T3任务测试. 每项任务完成后,完成认知负荷量表和满意度量表.
步骤5为避免固定试验顺序对试验结果的影响,被试的试验顺序不同.
在试验数据基础上,采用配对样本t检验方法,考察了汽车共享任务对交互可用性和驾驶安全性的影响.
2 交互可用性
2.1 交互时间
对停车交互和驾驶中交互两种状态下的交互时间进行了比较.t检验结果为:任务T1的t值为2.650,P值为0.014;任务T2的t值为4.826,P值为0;任务T3的t值为2.937,P值为0.007;说明停车和驾驶中的交互时间均存在显著差异. 如图3所示,在任务T1~T3中,驾驶中的交互时间比停车状态下的交互时间长24%~87%,这说明驾驶行为在所有交互场景中都会显著增加交互时间.
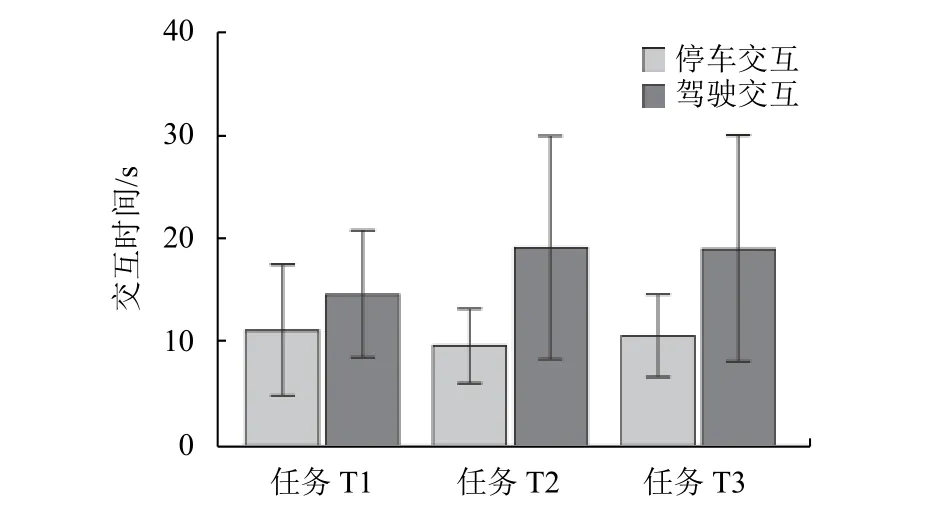
图3 交互时间Fig. 3 Interaction time
2.2 满意度
对停车交互和驾驶中交互两种状态下的满意度进行比较,t检验结果为:任务T1的t值为3.246,P值为0.014,任务T2的t值为2.807,P值为0.010;这反映出在任务T1和T2中,停车交互与驾驶中交互的满意度存在显著差异. 如图4所示,任务T1在驾驶交互时的满意度为6.597 ± 2.539,低于停车交互时的满意度7.758 ± 2.294;任务T2在驾驶交互时的满意度为6.404 ± 2.660,低于停车交互时的满意度7.571 ± 2.237. 驾驶交互时的满意度比停车交互时降低了15%,这说明驾驶分心和认知负荷的增加会造成主观满意度的降低. 但在任务T3中停车交互和驾驶中交互的主观满意度没有显著差异,结合试验后的用户访谈发现,这可能是因为在操作任务T3时需要较多的视觉浏览和手指交互,较为复杂,即使在停车状态下也占用了用户相当大的注意力,因此用户难以通过主观感觉分辨停车状态和驾驶状态下的满意度差异.
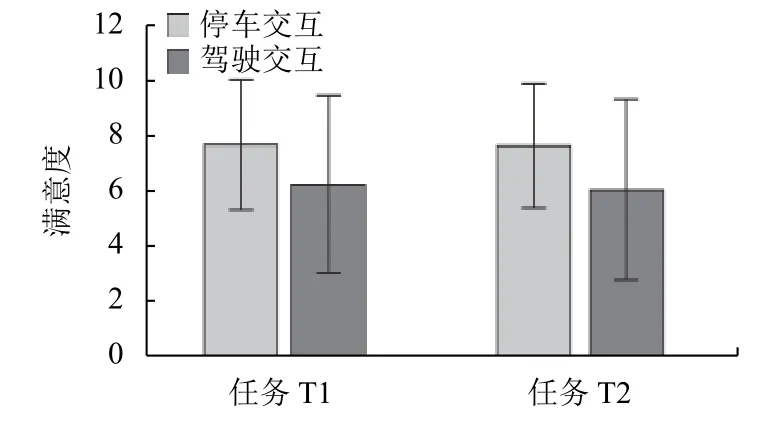
图4 满意度Fig. 4 Satisfaction rating
2.3 认知负荷
对停车交互和驾驶交互两种状态下的认知负荷进行比较,t检验结果为:任务T2的t值为3.309,P值为0.003,任务T3的t值为4.895,P值为0;这反映出在任务T2和T3中,停车交互与驾驶中交互的认知负荷存在显著差异. 如图5所示,任务T2在驾驶交互时的认知负荷为4.022 ± 2.670,高于停车交互时的认知负荷3.024 ± 2.042;任务T3在驾驶交互时的认知负荷为4.108 ± 2.347,高于停车交互时的认知负荷2.550 ± 1.665,驾驶状态下的认知负荷比停车状态增加了33%~61%. 这说明驾驶行为会造成认知负荷的增加.
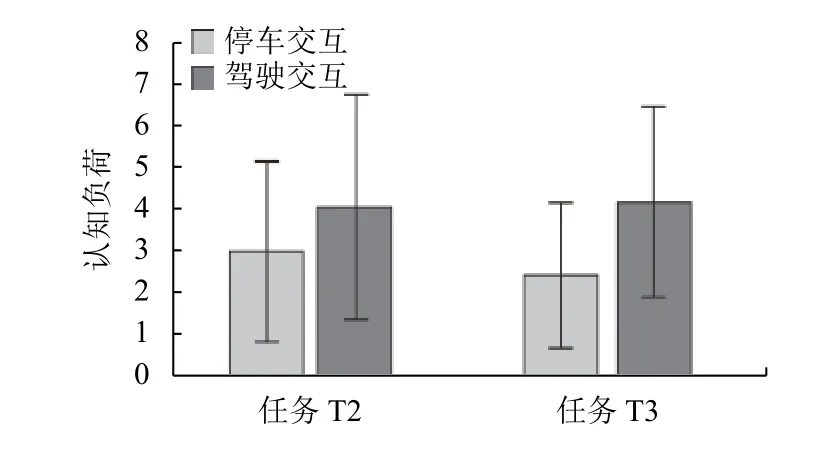
图5 认知负荷Fig. 5 Cognitive load
2.4 交互错误
对停车交互和驾驶中交互两种状态下的交互错误比较发现:各任务中的交互错误都不存在显著差异.
3 驾驶安全性
3.1 车速
对驾驶不操作软件(driving without operating software,DWOS)、驾驶的同时操作软件(operating software while driving,OSWD)两种状态下的车速进行了比较. 结果发现,任务T2的t检验结果为:t值为2.257,P值为0.034,车速存在显著差异. 如图6所示,在DWOS状态下的车速为(50.40 ± 5.36) km/h,高于在OSWD状态下的车速(46.54 ± 7.16) km/h.这说明驾驶时操作软件会导致车速的降低,这可能是因为司机意识到了风险而采取的补偿措施[9,23].
3.2 方向盘调整角度、方向盘调整次数
对DWOS、OSWD状态下的方向盘调整角度和调整次数进行了比较.
方向盘调整角度的t检验结果为:任务T1的t值为2.255,P值为0.034,任务T2的t值为3.037,P值为0.006,任务T3的t值为4.213,P值为0. 任务T1~T3在 OSWD、DWOS两种状态下均存在显著差异. 如图7所示, OSWD状态下比DWOS状态下的方向盘调整角度增加了25%~66%.
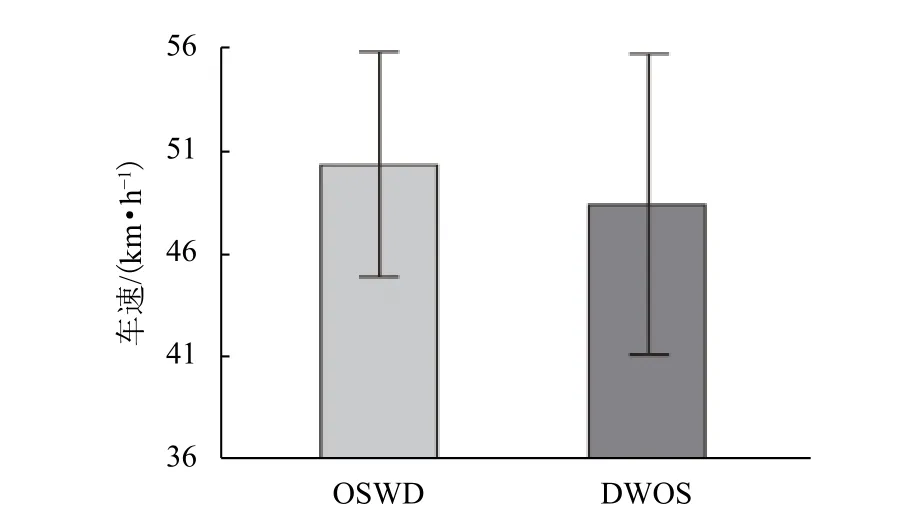
图6 任务T2的车速Fig. 6 Driving speed of task T2
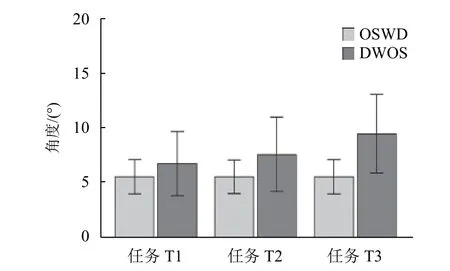
图7 方向盘调整角度Fig. 7 Steering wheel adjustment angle
方向盘调整次数的t检验结果为:任务T1的t值为2.731,P值为0.012,任务T3的t值为4.513,P值为0. 如表1所示,OSWD状态下比DWOS状态下的方向盘调整次数增加了217%~761%,这说明驾驶时操作软件对于司机控制方向盘的能力有显著影响.
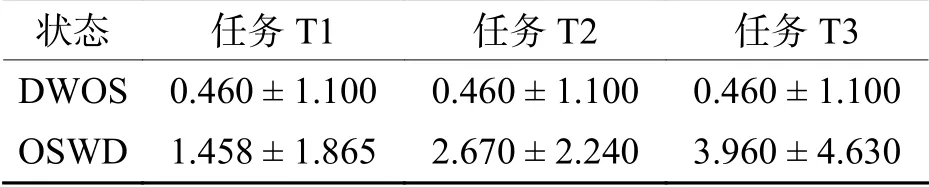
表 1 方向盘调整次数Tab. 1 Times of adjusting steering wheel 次
3.3 驾驶错误
DWOS、OSWD状态下的驾驶错误的t检验结果为:任务T1~T3的P值均为0,t值分别为4.764、5.572、5.264;说明任务T1~T3在DWOS、OSWD状态下均存在显著差异. 如表2所示,在OSWD状态下的驾驶错误比在DWOS状态下的驾驶错误增加了512%~1053%,这说明驾驶时操作软件容易导致司机驾驶错误的出现.
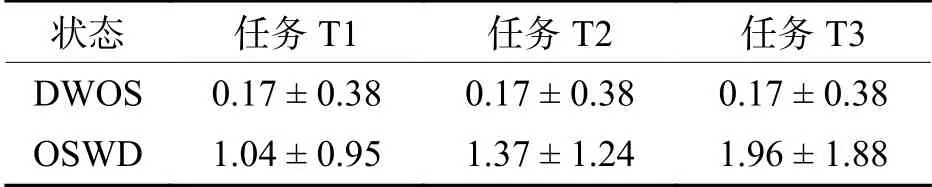
表2 驾驶错误Tab. 2 Driving errors 次
3.4 反应时间和制动时间
对DWOS、OSWD两种状态下的反应时间和制动时间进行了比较. 结果发现,任务T3的t检验结果为t值为2.585,P值为0.017,DWOS、OSWD两种状态存在显著差异. 如图8所示,OSWD状态下的反应时间比DWOS状态下增加了45%. 具体来看,任务T3在OSWD状态下的反应时间为(0.81 ±0.52) s,高于在DWOS状态下的反应时间(0.56 ±0.32) s. 这可能是因为任务T3相对任务T1和T2更为复杂,有较多的离开方向盘的手指交互操作和视觉浏览操作,这说明交互压力更大的任务会更为显著的影响制动反应时间. 对于制动时间来说,在各任务中都不存在显著差异.
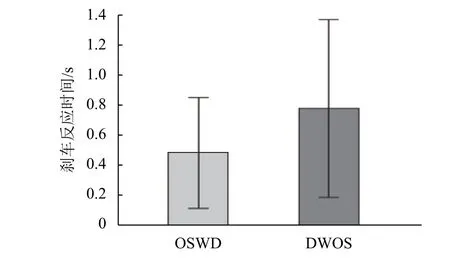
图8 任务T3的反应时间Fig. 8 Reaction time of task T3
4 结 论
1) 在驾驶状态下操作汽车共享软件会显著影响手机交互绩效. 具体来看,会导致驾驶员交互时间增加、满意度降低和认知负荷增加,但不会导致交互错误的增加.
2) 此外,发现相对驾驶时不操作软件,驾驶时操作软件会显著影响驾驶安全性. 具体表现为制动反应时间增加、方向盘保持能力的下降、驾驶错误的增加、车速的降低. 但如果司机已经做出制动反应行为后,在制动时间上,驾驶的同时是否操作软件没有显著差异. 这说明汽车共享软件导致的驾驶分心只影响反应时间,而不会影响制动行为. 但更为具体的影响机制还需要进一步研究确定.
本研究的结果能为汽车共享软件的智能化设计、汽车共享软件场景中的驾驶安全性补偿设计提供理论借鉴,也可为汽车共享驾驶员的准入和培训标准提供一定参考.
致谢:西南交通大学美国研究中心2020年度项目(ARC2020006);工效学会-津发优秀青年学者联合研究基金(CES-Kingfar-2019-001)资助.
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26
海洋信息技术与应用(2021年1期)2021-06-11 01:20:34
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
汽车维护与修理(2018年1期)2018-04-04 01:13:22
传媒评论(2017年8期)2017-11-08 01:47:36
河南科技(2015年7期)2015-03-11 16:23:13
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
汽车零部件(2014年5期)2014-11-11 12:24:30